车用小型无刷直流电机转速控制系统设计
2023-06-03邓鹏唐文涛罗静孙歆钰
邓鹏 唐文涛 罗静 孙歆钰
摘要:针对车用小型无刷直流电机转速控制过程中存在超调量大、转矩波动大和调速不平滑等问题,采用STM32F103C8T6单片机作为无刷直流电机的控制核心,并利用PID修正算法实现了车用小型直流无刷电机的转速控制。为了增大无刷直流电机的调速范围、减小系统静差率,采用校正后的PID算法控制无刷直流电机的转速,其特点是原理简单、调速控制方便、性能稳定。通过仿真和实验验证表明,采用PID校正后,电机抗干扰和动态控制能力大幅提升,系统的稳态精度高,跟随性强,超调量小,非常适合在负载突变频繁的环境中工作。
关键词:无刷直流电机;STM32F103C8T6单片机;PID校正;传递函数
中图分类号:TP33 文献标志码:A 文章编号:1008-4657(2023)02-0001-08
0 引言
随着经济的发展和人们生活水平的提高,汽车等交通工具在人们的日常生活中起着不可或缺的作用,其需求日益增长,然而市面上的小型车辆多以石油等不可再生的化石燃料为动力源,化石燃料燃烧时会产生二氧化碳以及有毒气体,不仅加重温室效应,还会产生雾霾等环境污染问题。近年来,无刷电机异军突起。无刷电机性能优良,在运行过程中不会对环境产生污染,且具有工作噪音小、转化效率高、制造成本低等优点。随着交通运输业的迅速发展,研发以无刷直流电机作为车用小型驱动力转化来源的高性能小型车辆成为主流。
国外研究无刷直流电机比较早,经过几十年的发展,无刷直流电机的控制技术逐渐趋于成熟[ 1-3 ]。国内对无刷直流电机控制技术的研究始于20世纪70年代,最开始主要集中在高校和研究所,到上个世纪80年代,无刷直流电机逐步应用于工业控制系统中。无刷直流电机不仅具有调速性能好、运行效率高等优点,还具备交流电机的结构简单、维护方便、运行可靠等性能,是小型车用驱动系统的理想动力转化装置。考虑到实际安装在小型车辆上的驱动电机工作环境复杂、工况多变,本设计通过引入先进的控制策略来提高直流无刷电机的控制性能。
1 小型无刷直流电机的工作原理及数学模型
1.1 小型无刷直流电机的工作原理
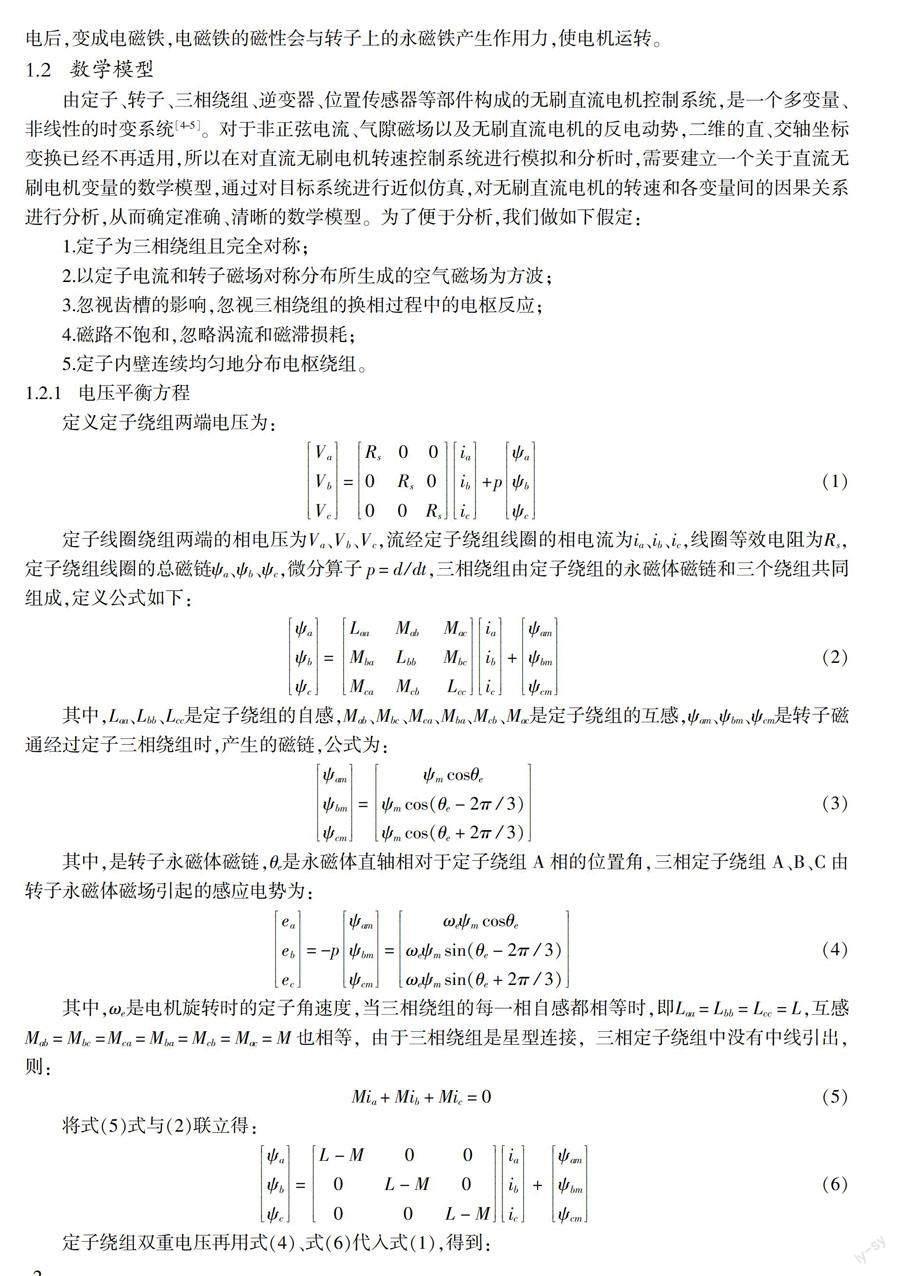
无刷直流电机(简称BLDCM)由定子、转子和机壳组成,是一种典型的机电一体化设备,它在结构上最大的特点是没有碳刷。无刷直流电机容量范围可达400 kW以上,电压种类多、效率高、调速范围广。无刷直流电机磁场是由安装有永磁铁的内部运动部件的通电导体产生,定子由线圈组成,线圈通上直流电后,变成电磁铁,电磁铁的磁性会与转子上的永磁铁产生作用力,使电机运转。
2.2.3 设置模糊控制规则
PID控制器的3个参数值取值是根据直流电机转速及其转速误差率得到的,根据工程经验,可以得到合适的模糊规则表,如表1所示。
2.2.4 解模糊化
经过模糊推理,得到的输出是一个模糊集合,我们需要用确定的值对无刷电机进行控制,因此,还需要进行解模糊化。解模糊化就是将控制器输出的不确定的量乘以比例因子,从而得到确定的值。
从以上模型可以看出,采用模糊PID算法,可以实时修正PID参数,使系统转速控制更精确。
3 系统控制硬件电路设计
本文所设计的直流无刷电机速度控制系统采用STM32F103C8T6单片机进行控制,其硬件部件由STM32F103C8T6单片机、OLED12864液晶显示屏、独立键盘、直流无刷电机、复位电路、晶振电路等组成。STM32F103C8T6单片机性价比高,使用简单,功能强大。系统工作时先通过按键设置功能,单片机通过定时器产生PWM脉冲信号,根据定时器产生的脉冲实现对电机控制,最终实现无刷电机的起动、停止、加速、减速以及方向的改变。在OLED12864液晶上显示当前的无刷电机轴的转速。无刷直流电机的转速控制框图如图5所示。
3.1 辅助电源电路设计
本系统使用的工作电压为12 V,OLED12864显示屏工作电压为5 V,单片机的工作电压为3.3 V[ 13-15 ]。整个系统采用12 V适配器供电,12 V电压转5 V和3.3 V电压电路图如图6所示,通过LM2596芯片将12 V电压转成5 V电压,再通过LM1117芯片将5 V转成3.3 V,为了减小电磁干扰对输入信号的干扰,在输入端并联两个滤波电容。
3.2 OLED12864显示电路的设计
作为新一代显示技术,有机发光显示技术(Ganic Light Eming Display)可实时显示文字、汉字、图片等信息。与普通LCD显示屏相比,OLED在超轻薄,低功耗,高亮度,广可视角度,自发光,快速响应等方面具有很大优势,在各种仪器仪表的显示终端上得到了广泛的应用。
本论文以OLED12864为OLED单色文字图表显示模块,使用12 864行点阵,内具有64 × 64的显示数据,各数据与OLED屏幕相对应,在某个一点暗状态下进行亮暗。OLED12864接口电路和程序编写简单,数据接口为串行接口,可以方便的与STM32单片机连接。
3.3 按键模块的设计
由于本设计中所需要的按键并不多,采用3个独立的按键即可,按键一个引脚直接接到单片机的GPIO口,另一个引脚接地,CPU通过GPIO口检测按键状态。三个独立分别为KEY1、KEY2、KEY3,KEY1是轉换操作,操作方式为停止、正传、反转;按键KEY2用于控制无刷直流电机加速;按键KEY3用于控制无刷直流电机减速。
4 系统软件设计
本设计的软件部分主要包括系统主程序、A/D转换程序、数据显示程序、数据通信程序和中断服务程序等部分,为使直流无刷电机的转速控制系统达到良好的效果,软件设计过程中对程序进行了优化。其中,主程序主要通过判断按键扫描来完成电机控制;利用中断模块实时捕捉位置信号中断情况,对转子位置信息进行准确及时的检测,确保电机运行正常。
主程序首先完成各个模块的初始化,包括系统时钟初始化、HAL库初始化、GPIO初始化、上位机通讯协议初始化、调试串口初始化、目标速度初始化等,以保证各模块的正常运行。主程序工作顺序从上到下,当产生中断时,将转到中断服务子程序处执行,中断服务程序执行结束后再返回主程序,继续向下执行。主要程序工作流程如图7所示。
STM32单片机具有强大的中断功能,其每个GPIO口都可以设置成外部中断功能,与GPIO口连接的外接中断线达到16条。通过A/D采集电机转速的流程要结果经过采样、保持、量化、编码四个步骤。该系统具有转速、电流调节、故障保护等基本功能,利用中断服务程序实现了无刷电机的控制。在进入中断流程后,转子的位置捕捉与A/D采样中断,位置捕捉中断是通过检测更好地实现马达在转子的位置上的换相,A/D采样中断目的是确保电流的稳定输出和闭环控制。本文的中断程序模块用来实时捕捉位置信号,针对系统发生故障的问题,通过硬件中断保护系统,保证电机正常运转。中断程序模块包括中断方式采集转速和电流、中断服务子程序的A/D转换和中断服务子程序的霍尔电平变化。其中,霍尔电平变化起到连接程序在中断程序中的关键程序的作用,实现换相转矩脉动抑制。电机换相主要是通过改变控制寄存器,使PWM的输出极性发生变化,从而对电机换相进行控制。
5 系统测试
该系统采用闭环式的控制,通过调整PWM的占空比来实现电机的旋转速度。该系统采用了调试控制算法中的各参数,以实现控制的预测。为检验PI调整器的参数正确性,负载转矩在初始时刻0 N·m,在0.2s时,将基准转速调至1000 r/min,负载转矩调调整为10 N·m,转速波形和转矩波形如图8所示。
电机的输出转矩与转速有很大关系,它是由无刷电机推导的数学模型计算得到的,所以通过转速试验。通过对无刷电机的空载转速、负载转速、空载转矩和负载转矩的关系测试,在空载和负载启动时小车速度响应平滑、超调量小,同时具有转矩大并且稳定的特性。
6 结束语
本文设计了一种以STM32F103C8T6单片机为控制核心的车用小型直流无刷电机转速控制系统,根据直流无刷电机的特点建立了数学模型,通过校正后的PID算法,结合硬件和软件设计以及电机转速的控制,优化设计了车用小型直流无刷电机的转速控制系统。通过实验分析,完成了PID校正算法的实现,使电机测速的应用得到了更多的应用,使得电机抗干扰和动态控制能力大幅提升,稳态精度高,跟随性强,无超调,方法可行,效果更优,在负载突变频发环境非常适合。
参考文献:
[1] 袁继成,徐松,蔡华祥,等.机器人关节电机及其技术发展综述[J].微电机,2022,55(12):89-95.
[2] 胡文婷,陈超波,李长红,等.基于干扰观测器的永磁同步电机Smith电流控制[J].国外电子测量技术,2022,41(10):164-169.
[3] 蔡璐璐,闵琳.浅谈微特电机发展及定制化之路[J].微电机,2020,53(2):80-83.
[4] 周曉华,李振强,刘胜永.无刷直流电机神经元变结构PID调速系统研究[J].电机与控制应用,2016,43(1):12-16.
[5] 吴健,戴跃洪,唐鹏.永磁同步电机直接转矩优化控制研究[J].计算机仿真,2018,35(11):329-334.
[6] 朱其新,王嘉祺,谢广明.伺服系统复合自适应控制研究综述[J].航空制造技术,2021,64(22):14-27.
[7] 邓新阳,李伟,胡春艳,等.旋转直驱阀的双闭环模糊PID控制仿真分析[J].吉林大学学报(理学版),2021,59(4):915-921.
[8] 马铭遥,凌峰,孙雅蓉,等.三相电压型逆变器智能化故障诊断方法综述[J].中国电机工程学报,2020,40(23):7683-7699.
[9] 许睿,王邦继,刘庆想,等.微型无刷直流电机位置系统的过程控制[J].强激光与粒子束,2022,34(4):47-53.
[10] 姚元鑫,刘兴林,陈哲,等.高速无刷直流电机无滤波延迟换相控制方法[J].微电机,2020,53(2):67-70.
[11] 郭扬光,赵怀林,祝波.基于模糊控制的电动舵机控制器设计与实现[J].电力电子技术,2019,53(5):21-23.
[12] 李家荣.基于专家控制器的电动汽车感应电机弱磁区优化控制研究[J].电机与控制应用,2017,44(12):12-18.
[13] 苏锐,郭欢,范一松,等.基于STM32的脉冲激光器智能控制系统设计[J].量子电子学报,2019,36(2):161-167.
[14] 翟长远,朱瑞祥,黄胜,等.基于单片机的施药监测系统设计与试验[J].农业机械学报,2011,42(8):70-74.
[15] 党玲,刘云鹏,宋美球,等.车辆传动装置嵌入式无线扭矩测试系统研究[J].计算机测量与控制,2011,19(6):1338-1340.
[责任编辑:许立群]
Design of Speed Control System for Small
Brushless DC Motor in Vehicle
DENG Peng,TANG Wentao,LUO Jing,SUN Xinyu
(College of Electronic Information Engineering, Jingchu University of Technology, Jingmen 448000, China)
Abstract: To aim at the problems of large overshoot, large torque fluctuation and uneven speed regulation in the speed control of small brushless DC motors for vehicles, this design uses STM32F103C8T6 single-chip microcomputer as the control core of brushless DC motors, and realizes the rotational speed control of small DC brushless motor for vehicles with PID correction algorithm. In order to increase the speed range of the brushless DC motor and reduce the static error rate of the system, this design uses the corrected PID algorithm to control the speed of the brushless DC motor. It is characterized by simple principle, convenient speed control and stable performance. The simulation and experimental validation show that the PID correction has significantly improved the anti-interference and dynamic control capabilities of the motor, and the system has high steady-state accuracy, strong followability, and small overshoot, which is very suitable for working in the environment with frequent load changes.
Key words:brushless DC motor;STM32F103C8T6 microcontroller;PID correction;transfer function
收稿日期:2023-02-02
基金項目:湖北省高等学校优秀中青年科技创新团队项目(T2021028);荆门市重大科技计划项目(2022ZDYF017);荆楚理工学院校级科研项目(YB202207)
作者简介:邓鹏(1981-),男,湖北荆门人,荆楚理工学院高级实验师,硕士,主要研究方向:电机控制、电力电子与电力传动、机器人工程。
