高精度风速检测方法的研究与应用
2023-06-01樊昌元王财丽周麒丞苏德斌
樊昌元, 王财丽, 谭 杰, 周麒丞, 苏德斌
(成都信息工程大学电子工程学院,四川 成都 610225)
0 引言
中国风速测量仪器最早出现是殷代的伣[1],经过了几千年的更迭发展,1846年英国的T R Robinson 发明设计了风杯式风速计,其结构多采用三杯或四杯锥形杯的风杯架[2]。目前的风速传感器主要有风压式、热力学式、超声波式和传统双联电位器式[3],常用的超声波光电式传感器利用风杯带动装有发光二极管的多齿光盘转动,在光敏三极管上形成光脉冲信号,得到与风杯转速成正比的离散脉冲信号,在风速测量时存在风杯与光耦电路和MCU 与电脉冲序列频率测量之间的两大误差,影响风速测量精度[4-5]。
本文提出一种新型的全角度单电位器作为三杯式风速计的风速传感器,采集全角度单电位器上连续的模拟量,设计高精度风速检测算法,加工的电位器碳膜电阻线性度良好情况下,用于风速检测,通过连续的模拟信号输出,弥补光电式传感器离散脉冲信号的带来的测量误差,提高了风速检测精度。
1 全角度电位器设计及风速测量算法
1.1 全角度电位器结构及原理
在风速测量时,电位器上电阻的改变引起电压的变化,可以实现角度检测,但传统的电位器存在测量盲区,电器角度不能达到360°。本文设计了一种全角度单电位器,电器角度可以到达360°,解决了传统电位器的测量盲区问题[6-7],通过高精度风速测量算法,有效提高风速测量精度。
全角度单电位器在碳膜片内设有两个独立的内碳膜圈和外碳膜圈,内碳膜圈和外碳膜圈半径不一样,电阻也不一样。碳膜片用导线将其首尾相连,余下两端作为电位器两个连接端;设计一个滑动接触片分内外接触头,分别与内碳膜圈和外碳膜圈滑动相接,可无限圈旋转,滑片导线引出为电位器的中心抽头端;电位器内外碳膜圈电器角度错位,确保滑动接触片内外接触头旋转到任何位置至少有一个接触头接触到碳膜圈。
如图1 所示,两导电膜4 个端分别为外碳膜圈跳线端(A)、外碳膜圈电极引出端(B)和内碳膜圈电极引出端(C)、内碳膜圈跳线端(D),AD 两端通过跳线相连,两跳线端的错位角度为电器角度相位差θ,最大为180°。给电位器加一个恒流源,恒流源从B 端流入,经第一个导电膜电流流到A 端,再经过第二个导电膜流到C 端,C 端接地。

图1 俯视等效原理图
全角度无限旋转单电位器顶盖剖开部分后其结构如图2 所示,其中1-底座、2-顶盖,3-转轴,4-电极片,5-内碳膜圈电极片,6-内碳膜圈。

图2 顶盖剖掉部分后示意图
1.2 角度测量原理
当风杯旋转时,会带动与风杯旋转主轴连接的电极片旋转,使电极片分别作用于内外碳膜圈,通过研究电位器的电压与碳膜电阻之间的关系来反映电位器的旋转角度,其对应关系如图3 所示。
随着新课改的深入,高中教学需加强发挥高中生的主动性,让学生从被动学习的局面转变为主动学习,为以往高中化学教学注入新鲜血液.但在大量传统因素限制下,高中化学教学无法实现实质性改革,依旧继续沿用传统的教学模式,欠缺整体性与系统性,同生活与生产相违背,导致教学效果不佳.

图3 电压与角度关系图
电极片作用在内外碳膜圈旋转时,当电位器中心抽头上的电压为0≤VC≤IR1,此时的角度满足:
其中Vc为电极片的电压,α为电位器旋转角度,I为恒流源电流,R1内碳膜圈的电阻、R2为外碳膜圈的电阻,γ1为内碳膜圈开口对应的机械角度、γ2为外碳膜圈开口应对的机械角度,θ为内碳膜圈跳线端D 与外碳膜圈跳线端A 的错位角度,其取值范围要求满足γ1<θ≤仔和γ2<θ≤仔。图3 中VS、VL、VM为
注意:在风速测量时,需要判断瞬时电压Vc是否经过2仔-γ和2仔两个拐点,通过特定的数据处理进行数据质量控制。
1.3 拐点判断及数据处理
在电位器的测量过程中,在拐点处会发生如图3 所示的电压变化,需要判断瞬时电压Vc是否经过2仔-γ和2仔两个拐点,电压在拐点处变化的特征随着全角度电位器经过拐点的方向的变化而变化,主要分为4种情况,具体的判断流程如图4 所示。

图4 拐点判断及数据处理
拐点判断主要分为4 种情况:
(1)滑动触头顺时针经过内圈D 点。前4 个值连续增加(或相邻值相等)接近且小于或等于VS,第5 个值接近且小于或等于VL,处理办法:第5 个值用VS替换。
(2)滑动触头逆时针经过内圈D 点。前4 个值连续增加(或相邻值相等)并接近且小于或等于VL,第5个值接近或等于VS,处理办法:第5 个值用VL替换;
(3)滑动触头顺时针经过内圈C 点。前4 个值连续减小(或相邻值相等)并接近大于或等于VM,第5 个值接近或等于0,处理办法:第5 个值用VM替换;
(4)滑动触头逆时针经过内圈C 点。前4 个值连续减小(或相邻值相等)并接近或等于0,第5 个值接近且大于或等于VM,处理办法:第5 个值用0 替换;
1.4 高精度风速检测算法
本文设计高精度风速算法,考虑到电路收到类u及、闪电、和强磁场干扰,在风速算法中,设计AD 参考电压3.3 V,对应电压约10 mV,取10 mV作为标准,在相邻两个数据相差超过10 mV时判断存在外界干扰.。风速算法设计流程如图5 所示。
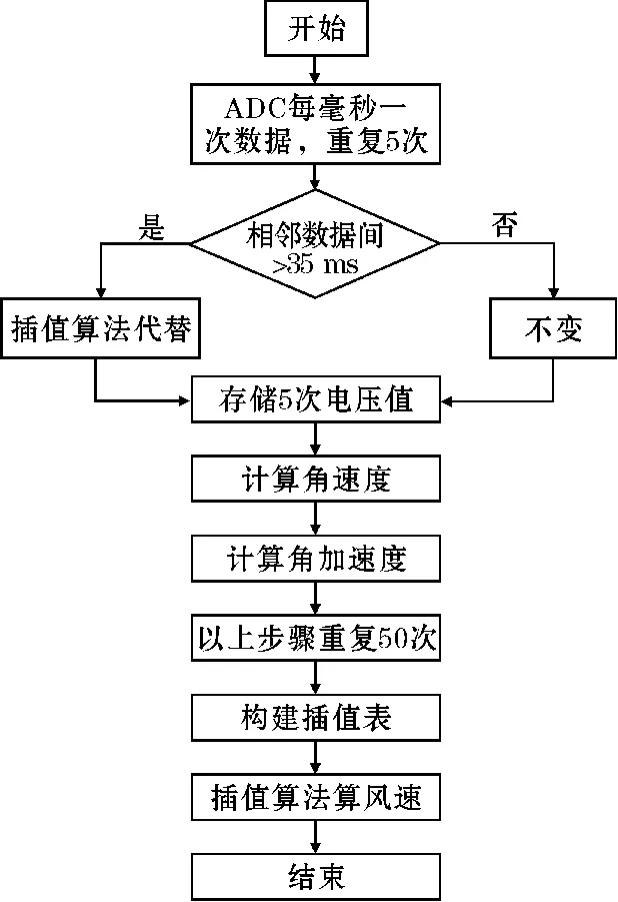
图5 风速算法流程图
其中在插值表给出的数据中,将相邻两点间的风速看成线性增加,得到角速度值集合{ωb1,ωb2,…,ωb14,ωbn}。首先判断ωN值,当ωN等于{ωb1,ωb2,…,ωb14,ωbn}中的某个值时,令VN=Vbn。否则,ωN将落在{ωb1,ωb2,…,ωb14,ωbn}中的两个数之间,即ωbn<ωN<ωbn-1,此时的瞬时风速Vn为
得到瞬时风速集合{V1,V2,…,VN}。
平均风速为
2 系统硬件设计与实现
2.1 系统的工作原理及框图
本文在传统三杯式风速测仪的基础上进行改良,将常用的光电脉冲式传感元件改用新型全角度单电位器,将风速测量转换为全角度单电位器的角度测量,并用STM32C6T6 的片内AD 采集后经过风速算法得到风速信息,通过蓝牙模块向手机端传输及在OLED 模块显示当前风速信息[7-11]。系统原理框图如图6 所示,主要包含全角度电位器,恒流源、STM32 和蓝牙模块。

图6 系统原理框图
2.2 风速转换电路设计
风速转换电路由全角度单电位器、恒流源电路、电压跟随器3 部分组成。整体思路是将恒流源与全角度单电位器连接,将电位器抽头与电压跟随器连接以供后续单片机进行数据采集[11-14]。恒流源模块为其提恒定电流保证全角度电位器的正常工作,选取具有良好的共模抑制比(CMRR)的OPA2365 作为恒流源模块的运放。
流程图如图7 所示,采集电位器电压信息时,设计电压跟随电路作为全角度单电位器及AD 采集的中间级,以“隔离”前后级之间的影响,起缓冲、隔离前后级阻抗匹配、提高带载能力的作用。

图7 系统程序流程图
3 系统软件设计
软件设计采用STM32F103C6T6 自带的A/D 对全角度电位器的电压信号进行采集,在中断函数中完成数据采集、模数转换、对数据处理进行风速算法编写,最后通过OLED 显示检测到的风速信息。
4 系统测试
为测试全角度电位器在风速测量中的应用能力,基于STM32 作为核心MCU,设计上述风速检测装置,测试结果如图8 所示,当天风速较低,风速值趋于平稳,该风速检测装置能精确地检测到风速的微小变化,系统测试效果较好。

图8 系统测试结果图
本风速测量系统可实现采集、传输、呈现一体化、系统各项功能正常。
5 结束语
提出并设计了一种新型全角度电位器和高精度风速检测算法,全角度单电位器采用内外碳膜圈碳膜结构设计,可以解决传统电位器存在测量角度盲区的问题,不存在测量死角,提高了测量精度。基于全角度电位器设计了风速检测装置,该装置依然选用三杯式风速传感器,通过电位器单位时间的角度变化,计算出三杯式风速传感器角速度,再计算出风速,相较于常用的光电脉冲式传感器将离散的信号转换成连续的模拟信号输出,经系统测试,风速测量效果较好,经过数据质量控制,系统抗干扰能力强,风速测量精度高。
