基于气象无人机观测的测风优化研究
2023-06-01凌荣巧卢会国蒋娟萍冯岩莹
凌荣巧, 卢会国, 蒋娟萍, 冯岩莹
(成都信息工程大学电子工程学院,四川 成都 610225)
0 引言
实时准确的气象探测资料是开展气象预报预测、防灾减灾、空中任务保障的重要一环[1-2],气象探测资料包括温度、湿度、风向、风速、气压等气象数据,气象数据的采集是气象观测的重要工作[3]。目前,地基观测设备资料的空间性和连续性有很大的不足,在大范围内获取气象要素只能借助探空设备[4-5]。
随着航空和电子技术的发展应用,利用无人机测量气象要素的趋势已经越来越明显。无人机能够持续、不间断地进行气象要素采集,具有机动性强、飞行高度高、续航时间长等优点,在气象观测应用领域将得到更多的关注[6]。不过,由于无人机在飞行过程中经常会受到风的影响[7],使无人机中关于风场参数测定的困难度很大[8],所以如何通过无人机精确地测定风速风向已是目前无人机气象监测领域的重要研发方向[9]。
对于空中测风,建立了高空气象探测站,每天早晚两次通过放飞探空气球来获得其他高度层上的风场信息,但是其探空资料十分有限,所以逐渐通过无人机来测风。马舒庆等[10]先后提出了水平空速归零法和解析测风法来测风,屈耀红等[11]在2009年提出了航位推算法。目前常用的测风方法是皮托-静压管法,是澳大利亚气象局Dr Greg Holland[12]在1992年提出的。针对于皮托-静压管测风法,为进一步提高其精度,减小其空速误差、地速误差、角度误差和探测“野值”等误差来源,国内外也进行了大量的研究[13]。任金彬等[14]对无人机皮托-静压管测风做了误差分析,认为空速误差是引起风速误差的关键,而引起空速误差的关键是静压误差,可以改变无人机和皮托-静压管的外形和形状以及修正攻角和马赫数的影响来减小。周伟静等[15]借助无人机皮托-静压管测风原理,建立了基于磁偏角对测风影响的数学模型,并通过仿真、实验进行相关的验证。王彦杰等[16]提出了一种针对气象无人机飞行角度的优化测风方案,对测量总压、空速与地速的夹角进行了修正。金永奇等[17]提出了引入加速度的无人机皮托-静压管法的测风模型,分析了无人机在飞行时加速度对测风的影响。Borup 等[18]利用配备了全球导航卫星系统并辅助以惯性导航系统(GNSS-INS)的固定翼无人机,提出了一种指数稳定的非线性风速观测器,该观测器可以估计皮托-静压管系数并对无人机持续的机动性没有要求,研究结果表明,该观测器计算的风速在无模型误差的情况下收敛于真实风速。
本文通过对现有皮托-静压管测风模型进行改进,考虑实时的空气密度,空气密度又和气温与气压有关系,对比引入实时空气密度前后风速误差和空速误差,从而说明引入空气密度的必要性。
1 现有测风模型
当前,固定翼无人机测风主要是使用皮托-静压管法,借助于皮托-静压管测得其空速,再借助GPS 等设备测得地速,被测的空速、地速和风速呈矢量三角形,再通过解三角形得到风速[19]。将地速、空速和风速三者映射到大地坐标系上如图1 所示,得到风速的计算公式[17]:
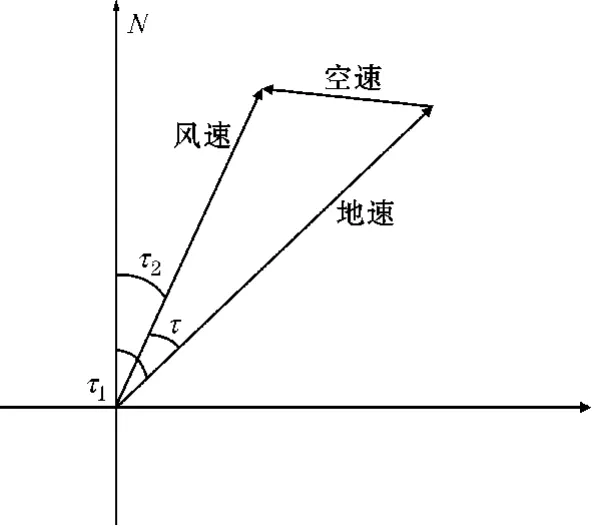
图1 地速、空速和风速矢量图
其中,vw是风速,vg是地速,va是空速,子是地速与空速的夹角。图1中子1是地速相对于地理北的夹角,通过GPS 可获得;子2 是空速相对于地理北的夹角,可通过陀螺仪获得;而地速与空速的夹角子为子1和子2之差。
皮托-静压管又叫空速管,由两部分组成,即总压管(皮托管)和静压管,负责测量无人机飞行时的总压和静压,一般安装于无人机的正前方。由于气象无人机飞行时的巡航速度相对于载客民用飞机飞行时的速度要低得多,马赫数小于0.3。所以,气体可认为是不可压缩的,此时可应用伯努利方程:
式中Pt为总压;P0为静压;ρ为空气密度常数;v是空速
理想气体状态方程为:
结合伯努利方程和理想气体状态方程可得到空速模型为:
其中,R为气体常数,对于理想气体,R一般取287/J(Kg·K);T为静温(K);ΔP=Pt-P0,即总压与静压之差;P0和P均为静压。
无人机的地速是相对于大地运动的速度,无人机的空速是相对于空气运动的速度,二者之间存在一定的夹角,如果在静风的情况下,夹角子为0,即地速等于空速。因此,风速的作用才使无人机的地速和空速不相等,通过测量地速和空速就可以间接测得风速。由地速、空速和风速的三者矢量关系可知,风速误差主要来源于地速测量和空速测量,由图1 可知,误差包括大小和方向,主要考虑其速度大小上的误差。皮托-静压管测风可用于风洞中做风速测量标准传感器使用,风向的测量则需要在一个圆周范围内每隔一定的间距安装一个皮托-静压管,反演出风向,所以风向的误差较小。
地速采用GPS 测得,GPS 的信号主要有3 种码,即C/A 码(粗捕获码)、P 码(经码)和Y 码。民用一般采用粗捕获码,其定位误差在29.3 ~2.93 m,测速精度0.3 m/s,对风速的传递误差为0.3[20]。如果风速为6 m/s时,地速误差导致的空速误差很小,所以对地速误差所带来的误差不予考虑。而在空速模型计算中,空气密度是一个常数,在中国国家标准规定的大气压下,空气密度为1.225 kg/m3,即无人机在飞行过程中空气密度都是取的这一数值,从而忽略了空气密度对测量空速的影响。而实际上,无人机飞行在不同的高度上,周围的空气密度是不同的。所以,需要考虑无人机所处的实时空气密度[21]。
2 考虑空气密度的测风模型
无人机处于不同的高度时,其空气密度不同。空气密度是指在一定的温度和压力下,单位体积空气所具有的质量。参考理想气体状态方程,空气密度ρ的表达式为:
由式(5),得知空气密度取决于气温和气压。在大气层中的对流层中,气温随海拔高度的增加而降低,高度每上升1 km,气温就下降6.5 ℃;空气压力是指单位面积向上延伸到大气上边界的垂直空气柱的重量,所以,随着海拔的升高气压随之降低。
海拔高度上升,气压下降,气温也会降低,气压和气温的变化决定了空速的变化,其中气压是静压,气压根据静压管测得,而气温弃用标准大气压下的温度,采用实时的温度,根据式(2)、(3)、(5)可得到修正后的风速模型:
Tr是实时气温,单位为热力学温度K,而气温传感器的所测温度为摄氏温度,其转换公式为:Tr=(t+273.15),P是静压,单位为hPa。
由此可知,空气密度ρ对于空速测量存在着一定的影响,气压和气温能反映空气密度的变化,现有的空速模型只是把气温看作是一个常数,由此空速测量造成了一定的系统误差,此误差会传递给风速,最终影响风速测量的结果。考虑实时空气密度的模型,消除了系统误差。
3 结果分析
考虑不同海拔高度的空气密度对测量空速的影响,根据无人机测风的实际情况进行数据分析,对比原有测得的空速和风速,可看到改进后的空速模型对减小误差的效果。本文采用的无人机是纵横CW-15 大鹏固定翼无人机,其主要参数如表1 所示,并且搭载了可以测量气温、相对湿度、气压等气象要素的集成传感器,其安装效果如图2 所示。试验的地点位于四川省成都市都江堰市,当地的海拔高度为793 m,处于东经103.7°,北纬31.1°,试验的时间段2021年12月11日上午11:19-12:11,每隔1 s传输一次飞行数据。
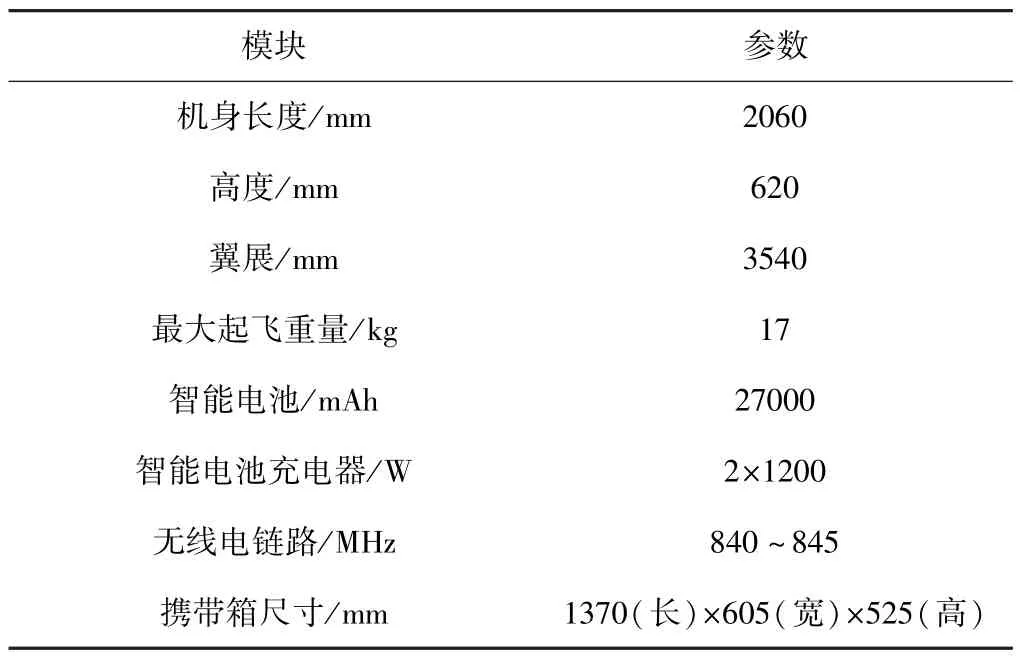
表1 无人机的相关参数
3.1 空速和风速的评判依据
无人机以圆和椭圆的轨迹在空中飞行,从地面飞行至海拔1200 m左右的空中进行实时测验。获得原始的地速、空速和风速的数据,在测空速的模型中考虑实时的空气密度从而得到修正的空速和修正的风速,分别对二者的误差进行分析。
用探空设备来测风的方式比较有限,通常分为三类:一是通过国家标准气象站在每天两个时间点放飞的探空气球来获得对应时间段在每个垂直高度上的探空数据,但是只能获得国家标准气象站附近区域上空的数据,而国家标准气象站的数量有限,其地理位置和探空气球的放飞时间制约了其应用的广泛性;二是通过气象雷达卫星等探空设备来反演某区域的风场情况,气象雷达设备的站点较为稀疏,数量有限,空间分辨率较低,不能做到精细化的分析;三是通过附近气象站或便携式自组网气象站来获得测风数据,但是只能测量到地面的风的情况。所以,以上3 种方式对空中风的测量都提供不了参考依据。本文所采用的皮托-静压管测风可用于风洞中做风速测量标准传感器使用,其风向的测量是在无人机上安装多个皮托-静压管进而来反演出风向,只是在测量空中风时,本文引入了实时的空气密度,进而在数值上对原始的风速测量有影响。因而,本文只能通过引入实时空气密度前后的风速变化来进行对比验证。
选定相对误差和绝对误差来评估改进后的测风模型。绝对误差是被测量值与真值之差,即:绝对误差=测量值-真值,所以绝对误差既有量纲又有符号[22]。但是真值是一个理想概念,一般无法获得,实际应用中通常用非常接近被测量的实际值来代替真值。本文采用修正后的空速和风速作为真值,原始的空速和风速作为测量值。因此,绝对误差表明了被测量物体的测量值与实际值之间的偏离程度和方向。测量质量不仅与实际偏离的值有关,还和其测量的精度有关,因为一个量的准确度不仅与绝对误差有关,还和这个量本身的大小有关,所以还需引入相对误差。相对误差是绝对误差和测量真值的百分比,相对误差只有大小和方向,没有单位。在本文中其测量真值仍然是修正后的空速和风速。绝对误差的绝对值和相对误差的百分比越大,表示改进后的测风模型越好。
3.2 空速和风速的定量计算分析
3.2.1 无人机飞行状态
分析2021年12月11日的飞行数据,当天西南风,风速大小为2 级,温度在5 ℃ ~11 ℃,无人机从海拔793 m 的山地起飞, 稳定飞行在海拔1150 ~1200 m,最终降落在原地。上午11:19-12:11 无人机飞行的三维轨迹如图3 所示。图3 中时间序列是指:每接收到一条无人机飞行数据的时间节点,通过时间序列、海拔高度以及经纬度可以实时掌握无人机的飞行状态。无人机在起飞和降落阶段为简单的直线飞行,而在平稳飞行阶段主要以绕椭圆飞行为主。图4为无人机在飞行路径上各个点的风矢量图,由于飞行轨迹有重合,所以风矢量产生重叠。虽然在同一轨迹上飞行,但是测量风速的时间有差异,其空气流动的方位和大小也有不同,所以在同一个点可能会出现风向不一致的情况。
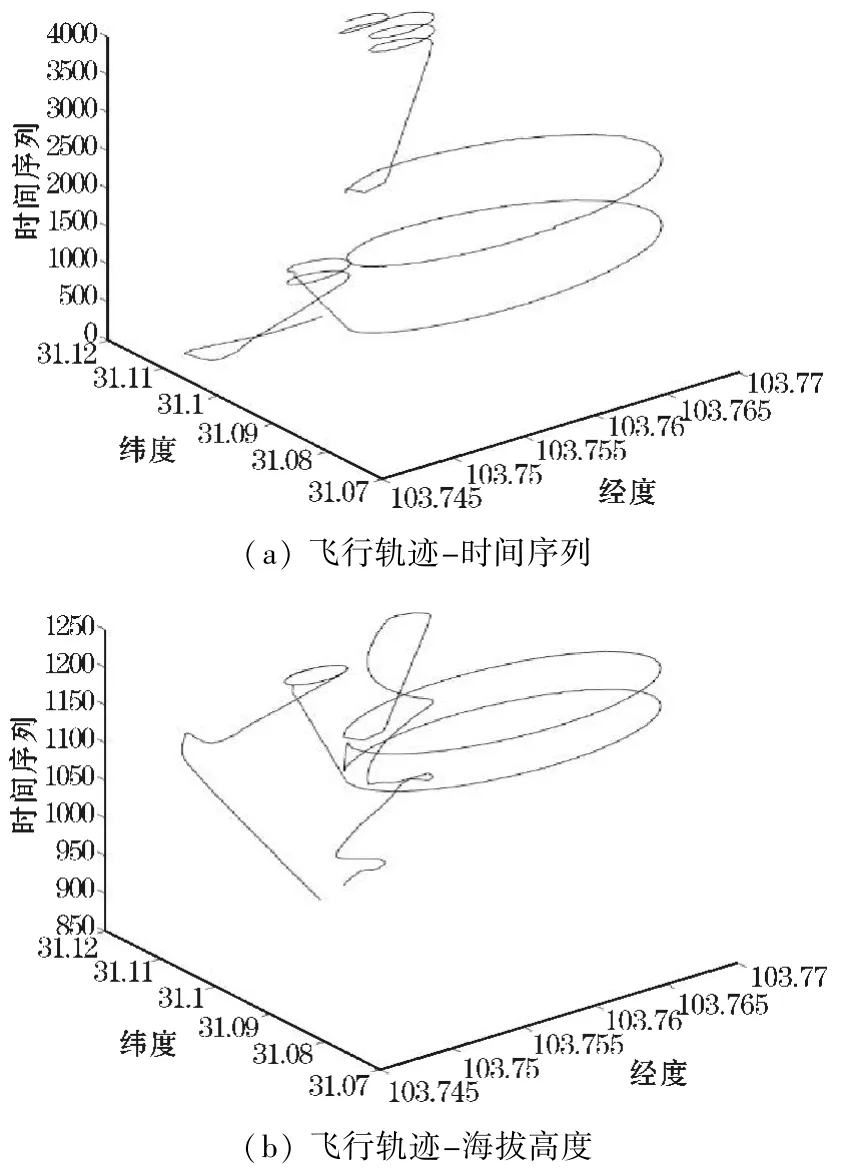
图3 无人机三维轨迹飞行图

图4 2021年12月11日上午无人机飞行路径上的风矢量
3.2.2 空速的误差分析
考虑无人机飞行时的空气密度,改进空速模型,并且通过地速、空速和风速三者的矢量关系得到其对应的风速,改进前后的空速对比和风速对比如图5和图6所示。通过图5可知,在考虑了实时的空气密度后,修正空速相比于原始空速都有所增加,并且二者速度变化的一致性都相当吻合,这是由于随着海拔高度上升,气温和气压降低,空速随之增加。稳定飞行阶段时原始空速基本稳定在18 m/s左右,而改进后这一数值达到了19 m/s左右;原始空速的平均速度是18.3 m/s,修正后的空速为19.5 m/s,飞机在起飞和降落阶段速度变化较为剧烈,一方面是由于飞机加速度的作用,另一方面是由于飞机一直做的是绕圈飞行,在风速的作用下,不同的转弯过程(顺风转弯或者逆风转弯)会产生不同的加速度从而影响飞行时的速度。由图7可知,无人机在飞行时的空速绝对误差大多分布在-1.35 ~-1.25m/s,相对误差保持在-6%左右。
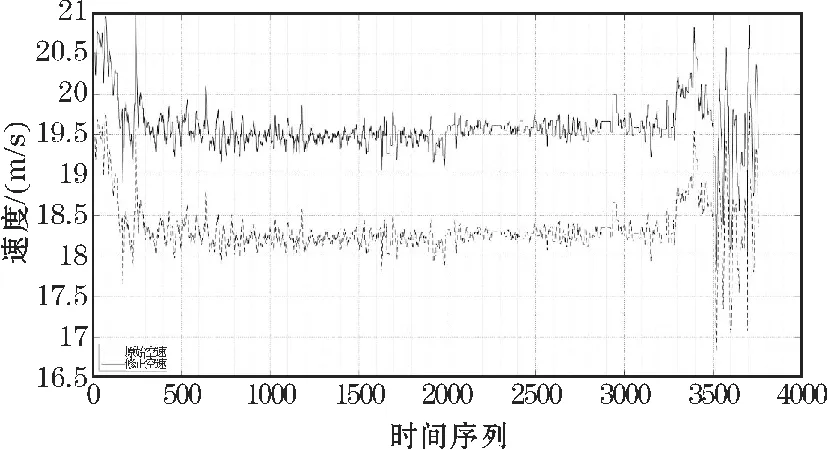
图5 2021年12月11日上午无人机空速改进前后对比
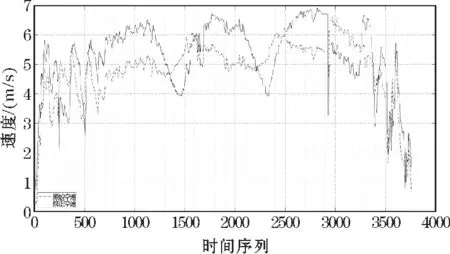
图6 2021年12月11日上午风速改进前后对比
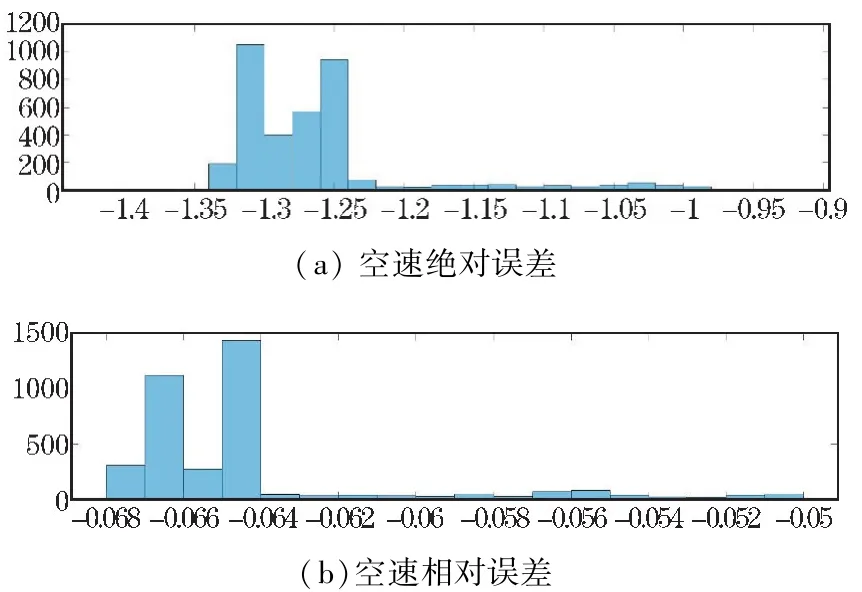
图7 空速绝对误差和相对误差直方图
3.2.3 风速的误差分析
综上可知,考虑了空气密度后修正所测得的空速,其绝对误差和相对误差都比较小,但是其产生的空速误差将传递给风速的测量。由于无人机飞行是近地绕圈飞行,并且飞行的速度不是很快,逆风飞行时其地速减小,顺风飞行时其地速增加,所以修正后的风速较原始风速有所波动。由图6 可知,在时间序列1200-1500 和2100-2400 时段,无人机正从西往东飞行,处于顺风的状态,地速增加,但是空速没有什么变化,所以风速的幅值下降,但其变化趋势与同一时刻的原始风速一致。稳定飞行阶段所测得的原始平均风速为4.86 m/s,修正后的风速的平均值为5.30 m/s。由图8可知,风速绝对误差分布在-1.4 ~1.4 m/s,相对误差分布在-25% ~25%。由此可知,忽略空气密度所引起的风速测量相对误差比较大,平均的相对误差都在20%左右,有时甚至可以超过40%。
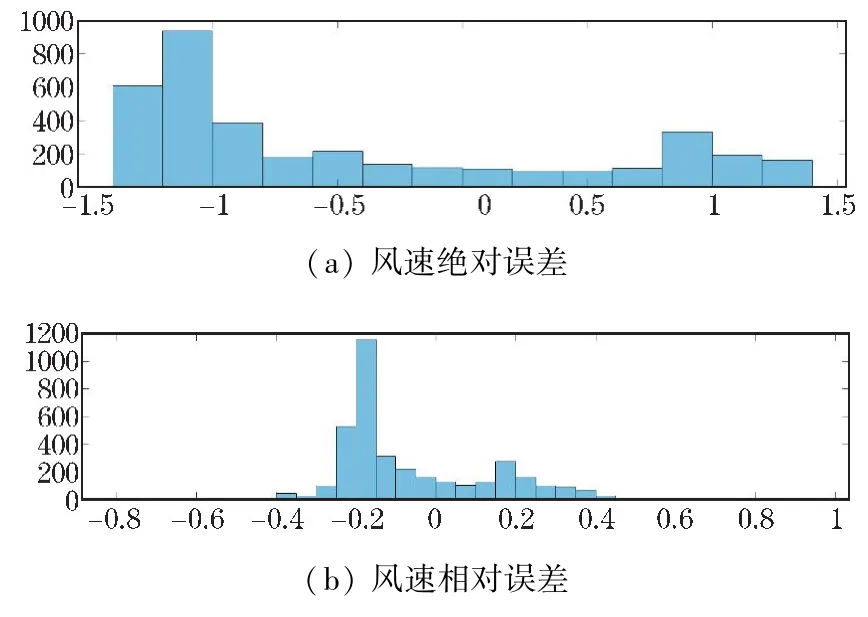
图8 风速绝对误差和相对误差直方图
4 总结与讨论
本文针对无人机皮托-静压管现有测风模型进行改进,考虑将无人机在飞行时的空气密度加入到测风模型中。空气密度与当时所处的气压与气温有关,把实时的气压与气温考虑进测风模型中,修正其对应的空速。由于地速、空速和风速构成矢量三角形,空速的改变会引起风速的变化,从而通过矢量三角形关系来修正风速。修正后的空速较原始空速有所增大,但是其变化趋势完全一致,平均速度从18.3 m/s上升到19.5 m/s,其绝对误差在-1.35 ~ -1.25 m/s,所带来的相对误差在-6%左右。然而,传递给风速的测量变化较大,但是其风速变化的趋势与原始风速基本一致,其绝对误差在分布在-1.4 ~ 1.4 m/s,相对误差在20%左右,误差较大的时刻甚至达到了40%左右。所以,考虑空气密度对无人机测风是不可忽视的。
总体而言,考虑空气密度对无人机皮托-静压管测风可以提高测风精度,但是还应该考虑基于此方法所带来的其他误差,如地速误差、角度误差,改进测风模型,提高测风精度。
