连续管钻井肋式定向器执行机构偏置位移优化
2023-05-30邢志晟孔璐琳祝传增郑硕焦滨海蒋世东李猛
邢志晟 孔璐琳 祝传增 郑硕 焦滨海 蒋世东 李猛
摘要:为了提高连续管肋式定向器井眼轨迹控制效果及定向效率,结合最小能量原则,建立了肋式定向器执行机构偏置位移矢量模型。根据旋转偏置位移理论对定向器的执行机构进行偏置位移矢量合成与分解、分位移矢量求解、工作过程与工具面数学关系分析,提出了分位移矢量计算方法。并结合实际工程中的设计要求,采用就近原则和最小能量原则进行三翼肋分位移矢量计算。综合考虑井眼扩大、实际钻进时定向器外套的转动等影响,建立了连续管定向器纠偏过程中“定向模式”及“保持模式”的肋位移控制方案,得到了肋位移变化的规律。研究结果表明:连续管钻井肋式定向器工作过程中,单肋位移的幅值决定了合位移的大小;在导向过程中,当三翼肋工具面角相隔120°时,某些运动规律相同;连续管钻井进入斜直井段时,此时不存在工具面,此时属于“钻进模式”,各肋位移相同。所得结论可为连续管钻井肋式定向器导向控制提供理论基础。
关键词:连续管钻井;肋式定向器;执行机构;偏置位移;优化研究
0 引 言
连续管钻井技术(CTD)是国际公认的全新钻井模式,高难度前沿技术,具有钻柱连续、带压作业、不间断循环、易于预置光纤和电缆、适合欠平衡钻井和气体钻井等显著特征[1]。CTD具有降本增效、减少污染、安全快捷等优势,克服了常规钻井技术和方式难以解决的问题,目前在北美已广泛应用于页岩油气、煤层气及致密油气等非常规油气藏的开发[2] 。页岩气钻井大多数为水平井,传统的井下马达导向為滑动钻进,连续管管柱不能旋转、单一滑动钻进、强度和疲劳寿命低于常规钻杆、大钻压施加受限、应对硬地层性能差、遇卡后解卡能力不足等局限性没有得到充分认识[3]。川渝地区页岩气资源丰富,但CTD在国内的应用仍处于起步阶段。
不同于常规钻柱,连续管是柔性管柱,具有不可旋转性,必须应用井下定向器调整工具面方可达到有效钻进的目的[4]。第一、二代CTD定向器下接弯螺杆,所钻出的井壁粗糙,导致连续管在钻进过程中极易发生屈曲,从而影响钻压传递,导致钻进困难[5]。CTD肋式定向器可解决这一问题,该定向器通过控制其关键机构(执行机构)输出偏置位移形成一定的工具面角,从而进行井眼轨迹控制。可见,CTD定向器的执行机构偏置位移规律是连续管钻井井眼轨迹控制的理论基础[6-9]。
目前国外连续管钻井定向装置可分为3大类,分别是液压定向器、电驱动定向器以及电液驱动定向器。国外的导向钻井技术在20世纪末已经相当成熟,该工具的相关技术长期被国际大型跨国油服公司所垄断,但其对我国实行了技术封锁,而国内连续管定向工具的研究才刚起步。近几年,虽然国内在该技术的许多领域已有突破性进展,但与国外技术尤其是新的旋转导向工具技术方面相比,仍有较大差距[10]。笔者在执行机构物理建模的基础之上,进行执行机构偏置位移优化研究,以期为定向器导向控制提供理论基础。
1 定向器技术分析
1.1 定向器结构
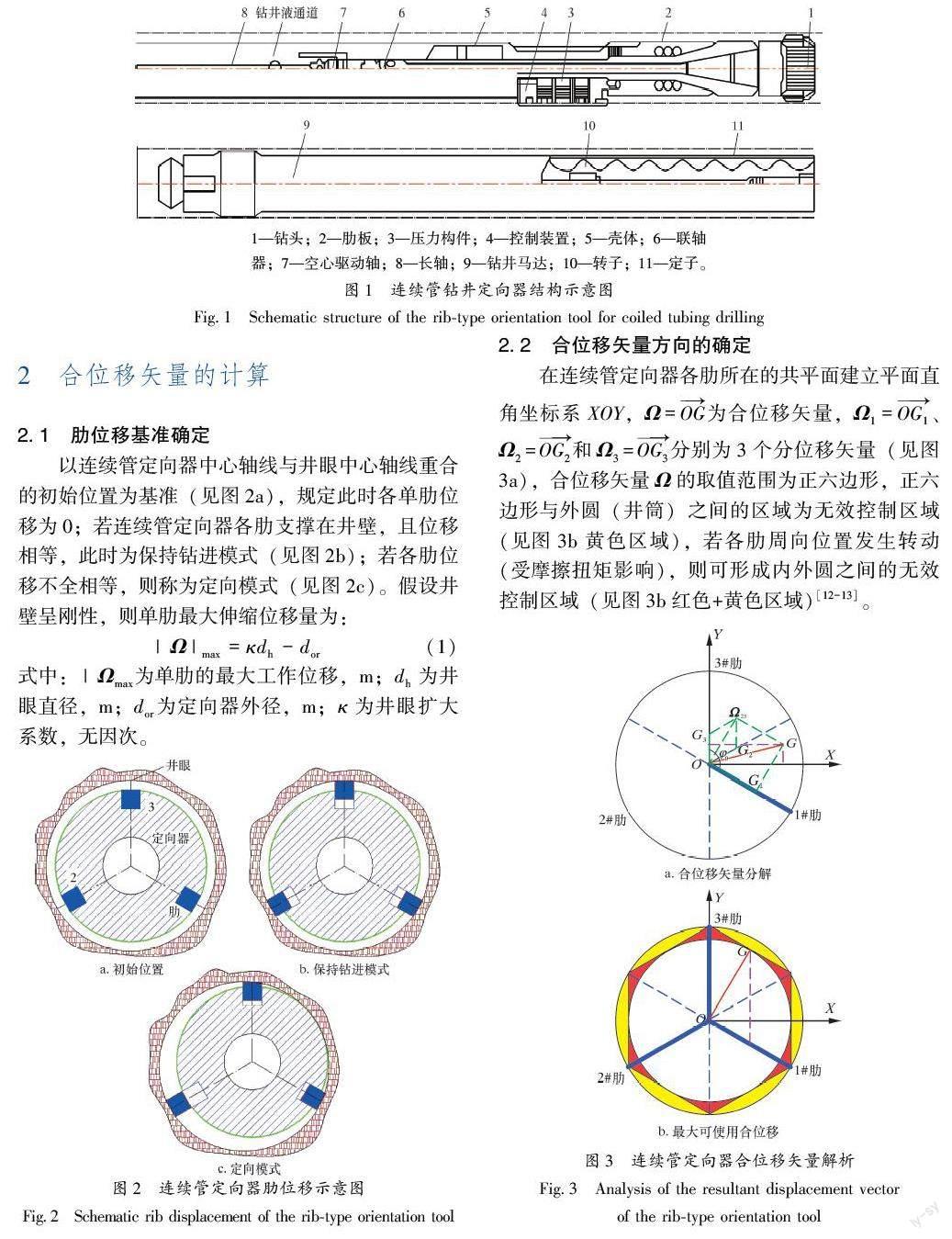
连续管钻井定向器结构如图 1 所示,主要包括动力装置、控制装置和压力构件等。其中动力装置包括1个钻井泵,用于向压力构件提供高压流体,控制压力构件在正常和径向延伸位置间移动;还包括与控制装置相关联的电动机。控制装置安装在电动机的旋转机构中,钻井电动机包括动力组件和轴承组件,其中转向装置分布在轴承组件中;每个控制装置包含1个流体控制阀,以及控制每个阀的阀门制动器。压力构件包括1个活塞,活塞受到来自动力装置的高压流体作用,使肋构件发生径向移动;还包括与压力构件相关联的传感器,用于接收和转化压力构件与参考位置之间位置关系的信号。
1.2 工作原理
在钻井过程中,电动机为钻头提供旋转动力,电动机和钻头之间的轴承组件向连接钻头的钻杆提供横向和轴向支撑。转向装置分布在钻井马达或轴承组件中,在钻井过程中提供方向控制。转向装置是安装在轴承箱外表面的多个肋。每个肋在外壳的正常或折叠位置与径向延伸位置之间移动。当处于延伸位置时,每个肋向井筒内部施加压力。为了改变钻井方向,激活1个或多个肋,即在每个肋上施加所需的力向外延伸。每个肋上的力的大小是独立设置和控制的,肋在钻头上产生一定的偏置力,接触井壁后,靠井壁的反作用力使钻头产生侧向切削力,从而实现导向[11]。动力装置分布在包含多个传感器的轴承组件中,传感器用于确定每个肋施加在井筒上的力。动力装置响应传感器后,通过电气控制单元或电路控制动力单元激活1个或多个肋板,从而控制肋的伸缩。控制电路可安装在钻井电动机上方或钻井电动机旋转部分的适当位置。对于小井眼,万向轴接头分布在转向装置的支座上,提供转向功能。
2.2 合位移矢量方向的确定
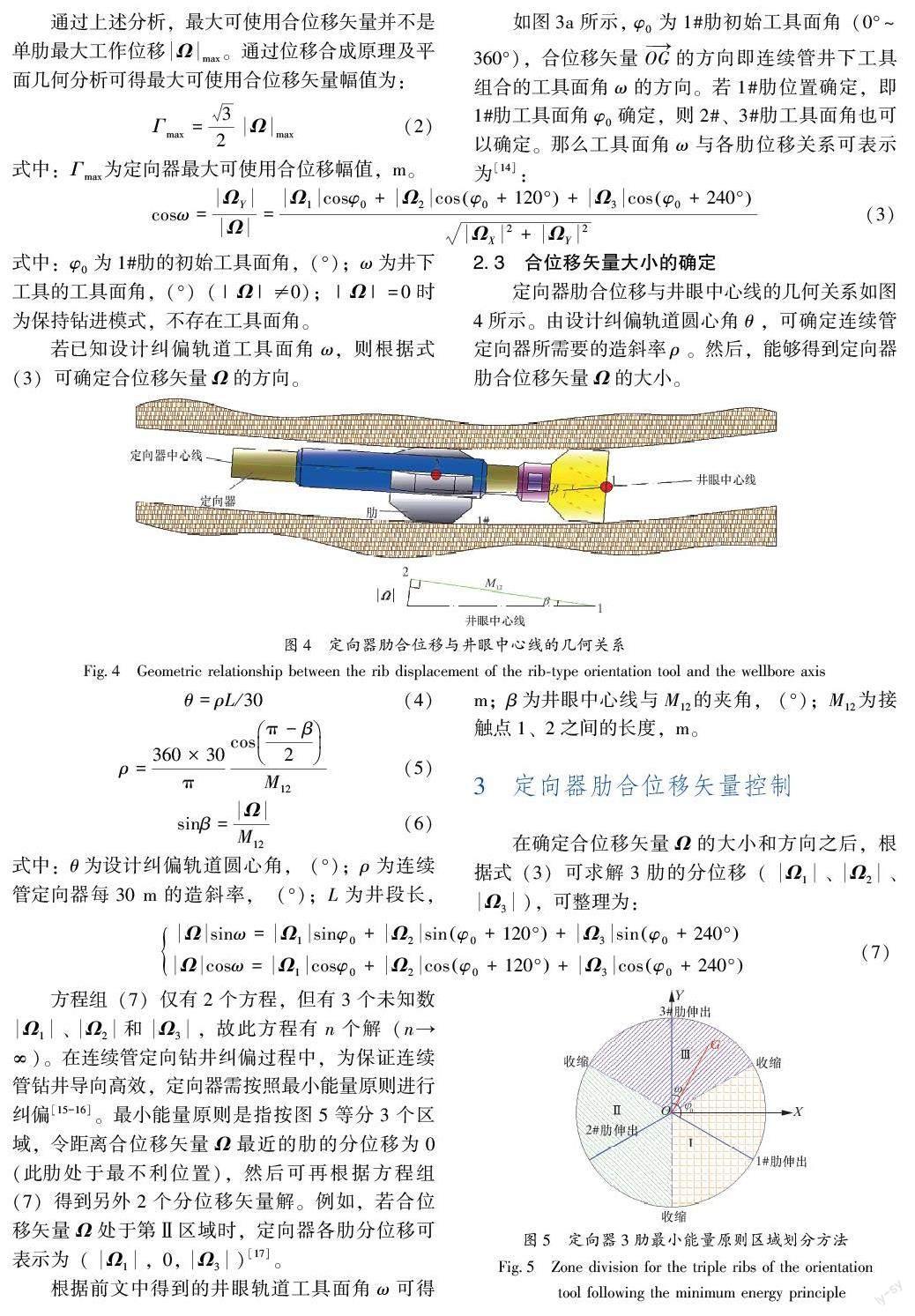
在连续管定向器各肋所在的共平面建立平面直角坐标系XOY,Ω=OG为合位移矢量,Ω1=OG1、Ω2=OG2和Ω3=OG3分别为3个分位移矢量(见图3a),合位移矢量Ω的取值范围为正六边形,正六边形与外圆(井筒)之间的区域为无效控制区域(见图3b黄色区域),若各肋周向位置发生转动(受摩擦扭矩影响),则可形成内外圆之间的无效控制区域(见图3b红色+黄色区域)[12-13]。
4 肋位移变化规律
根据式(9)、式(11)和式(13),可得连续管定向器各肋位移随工具面角变化规律,如图6所示。由图6a~图6c可得到合位移Γ1=10 mm;由图6d~图6f可得到的合位移Γ2=15 mm。
(1)以图6a为例,当固定1#肋工具面角为30°时,在轨迹的工具面角[0,90°]范围内,1#肋处于不利地位,1#肋位移为0,2#肋和3#肋均外伸,且随总工具面角增加,2#肋位移减小,3#肋位移先增加后减小;在总工具面角[90°,210°]范围内,2#肋处于不利地位,2#肋位移为0,1#肋和3#肋均外伸,且随总工具面角增加,2#肋位移先增加后减小,3#肋位移先减小后增加;在[210°,330°]范围内,3#肋处于不利地位,3#肋位移为0,1#肋和2#肋均外伸,且随总工具面角增加,1#肋位移先增加后减小,2#肋位移先减小后增加;在[330°,360°]范围内,1#肋处于不利地位,1#肋位移为0,2#肋和3#肋均外伸,且随总工具面角增加,2#肋位移增加,3#肋位移增加。
(2)由圖6a~图6c可知,若合位移Γ1为10 mm,单肋位移的最大幅值需为11.55 mm;从图6d~图6f可知,若合位移Γ2为15 mm,单肋位移的最大幅值需为17.32 mm;故单肋位移的幅值决定了合位移的大小。
(3)由图6a、图6c、图6e可知,1#肋工具面角相隔120°时,某些肋运动规律相同。例如,定向器1#肋工具面角分别为30°、150°、270°时,[Ω1-30°,Ω3-150°,Ω2-270°]位移运动规律相同,同样有[Ω2-30°,Ω1-150°,Ω3-270°]、[Ω3-30°,Ω2-150°,Ω1-270°]位移运动规律相同。
(4)从图6f可知,在设计轨道工具面角240°之后,连续管钻井进入斜直井段,不存在工具面角,连续管定向器为保持钻进模式,各肋位移相等,根据式(1),|Ω1|=|Ω2|=|Ω3|=κdh-dor;此时合位移大小为0。
5 结 论
(1)将连续管钻井肋式定向器偏置位移矢量控制简化为控制平面内位移矢量的合成与分解,指出分位移矢量求解时解的多样性,在三翼肋定向器实际工作过程中,使用就近原则和最小能量原则进行分位移矢量计算并实现钻井过程中的导向功能,建立了连续管钻井定向器导向过程中定向模式及保持模式的肋位移控制方案。
(2)通过对单肋不同工具面位移矢量分析,单肋位移的幅值决定了合位移的大小。肋工具面角相隔120°时,某些肋运动规律相同;连续管钻井进入斜直井段,不存在工具面角,连续管定向器为保持钻进模式,各肋位移相等。
参考文献:
[1] 贺会群,熊革,李梅,等.LZ580-73T连续管钻机的研制[J].石油机械,2012,40(11):1-4.
HE H Q,XIONG G,LI M,et al.Development of the LZ580-73T CT drilling rig[J].China Petroleum Machinery,2012,40(11): 1-4.
[2] 李猛,贺会群,辛永安,等.基于概率理论的连续管钻井调整工具面扭矩预测方法研究[J].长江大学学报(自科版),2016,13(10):61-71.
LI M,HE H Q,XIN Y A,et al.Torque calculation method for adjusting tool face during CTD based on probability theory[J].Journal of Yangtze University (Natural Science Edition),2016,13(10): 61-71.
[3] 贺会群,熊革,刘寿军,等.我国连续管钻井技术的十年攻关与实践[J].石油机械,2019,47(7):1-8.
HE H Q,XIONG G,LIU S J,et al.Ten years of key problems tackling and practice of coiled tubing drilling technology in China[J].China Petroleum Machinery,2019,47(7): 1-8.
[4] LI M,SU K H,WAN L F.Uncertainty analysis for hydraulic cylinder pressure calculation of orienter in coiled tubing drilling[J].Journal of Engineering Research,2019,7(1): 1-16.
[5] KRUEGER S,PRIDAT L.Twenty years of successful coiled tubing re-entry drilling with e-line BHA systems-improving efficiency and economics in maturing fields worldwide[C]∥SPE/ICoTA Coiled Tubing and Well Intervention Conference and Exhibition.Houston,Texas,USA: SPE,2016: SPE 179046-MS.
[6] SCHULZE-RIEGERT R,BAGHERI M,KROSCHE M.Multiple-objective optimization applied to well path design under geological uncertainty[C]∥SPE Reservoir Simulation Symposium.The Woodlands,Texas,USA: SPE,2011: SPE 141712-MS.
[7] MATHEUS J,NAGANATHAN S.Drilling automation: novel trajectory control algorithms for RSS[C]∥IADC/SPE Drilling Conference and Exhibition.New Orleans,Louisiana,USA: SPE,2010: SPE 127925-MS.
[8] VLEMMIX S,JOOSTEN G J P,BROUWER D R,et al.Adjoint-based well trajectory optimization in a thin oil rim[C]∥EUROPEC/EAGE Conference and Exhibition.Amsterdam,The Netherlands: SPE,2009: SPE 121891-MS.
[9] HIMMELBERG N,ECKERT A.Wellbore trajectory planning for complex stress states[C]∥47th U.S.Rock Mechanics/Geomechanics Symposium.San Francisco,California: ARMA,2013: ARMA 2013-316.
[10] 冯定,王鹏,张红,等.旋转导向工具研究现状及发展趋势[J].石油机械,2021,49(7):8-15.
FENG D,WANG P,ZHANG H,et al.Research status and development trend of rotary steerable system tool[J].China Petroleum Machinery,2021,49(7): 8-15.
[11] 赵金洲,孙铭新.旋转导向钻井系统的工作方式分析[J].石油机械,2004,32(6):73-75.
ZHAO J Z,SUN M X.Working mode analysis of rotary steerable system[J].China Petroleum Machinery,2004,32(6): 73-75.
[12] LI C N,SAMUEL R.Buckling of concentric string Pipe-in-Pipe[C]∥SPE Annual Technical Conference and Exhibition.San Antonio.Texas,USA: SPE 187455-MS.
[13] BOONSRI K.Torque simulation in the well planning process[C]∥IADC/SPE Asia Pacific Drilling Technology Conference.Bangkok,Thailand: IADC/SPE,2014: SPE 170500-MS.
[14] 胡亮,高德利.连续管钻定向井工具面角调整方法研究[J].石油钻探技术,2015,43(2):50-53.
HU L,GAO D L.Study on a method for Tool face re-orientation with coiled tubing drilling[J].Petroleum Drilling Techniques,2015,43(2): 50-53.
[15] 李猛,賀会群,辛永安,等.连续管钻井电液定向装置工具面调整方法[J].石油钻探技术,2016,44(6):48-54.
LI M,HE H Q,XIN Y A,et al.Tool face orientation by using an electric-hydraulic orienter during coiled tubing drilling[J].Petroleum Drilling Techniques,2016,44(6): 48-54.
[16] 李猛,贺会群,张云飞.连续管钻井电液定向器工具面角度调整分析[J].石油机械,2016,44(5):1-7.
LI M,HE H Q,ZHANG Y F.Analysis on electro-hydraulic orientation tool face angle adjustment for coiled tubing directional drilling[J].China Petroleum Machinery,2016,44(5): 1-7.
[17] 程载斌,姜伟,蒋世全,等.旋转导向系统三翼肋偏置位移矢量控制方案[J].石油学报,2010,31(4):676-679,683.
CHENG Z B,JIANG W,JIANG S Q,et al.Control scheme for displacement vector of three-pad biasing rotary steerable system[J].Acta Petrolei Sinica,2010,31(4): 676-679,683.