面向多车协同的非机动车转弯意向判定研究
2023-05-30毕国耀李佳灏
毕国耀 李佳灏


关键词:多车协同;非机动车;角速度特性;转弯意向判定;行驶安全
中图分类号:TP39 文献标识码:A
文章编号:1009-3044(2023)02-0004-03
1 引言
随着经济的发展和汽车的普及,城市或者城郊的交通环境变得更为复杂。而非机动车作为日常交通出行的交通工具的补充,由于自身体积较小,操作灵活,在短距离出行扮演重要角色。中国事故统计数据显示,近年来中国与非机动车相关的事故发生率持续上升,2017年和2018年分别为16568起和23716起[1]。最近的一项研究表明,中国十字路口超过一半的交通事故与非机动车有关[2]。
避免碰撞在自动驾驶辅助系统的关键功能之一,碰撞预警系统(Collision avoidance systems),能提前对风险预警,缩短驾驶员的反应时间,降低交通的事故率[3]。但是主要的研究都是避免与其他车辆碰撞,行人检测与风险预警。日本马自达公司提出了以自车和前方障碍物来规划安全的车距[4],本田公司提出了honda安全距离模型,采用了两端式的预警方式,成为当时应用最广泛的安全距离模型[5]。Park[6]等人基于传感器获取车辆的速度,加速度与行人的距离做出相应的反应。
然而碰撞预警系统无法解决视线被阻挡的问题[7],黄[8]等人提出了一个基于矢量的协同碰撞系统(VCCW),可以通过无线通信和附近的车辆进行信息交换,从而解决视野被阻挡的问题。但是仅限于智能车辆之间的位置识别,无法对非机动车的危险场景进行预警。再者,如果对所有非机动车轨迹进行预测,多个机动车轨迹从主车(Host Vehicle)发送给远程车辆(Near Vehicle), 广播信道中发送,所有邻近的车辆必须处理接收到的信息,并对得到的数据进行时间空间上的预测,以避免碰撞,这给车辆带来了沉重的工作负担[9]。严重邻近的车辆的运算性能。
上述研究都没有考虑到在被其他汽车阻挡视野的环境下,非机动车往阻挡汽车方向行驶的情况。本文通过协同车辆检测非机动车的角速度与速度单位矢量,提供非机动车的转弯意向判断,能够有效地预防非机动车视野被阻挡的问题。
2 模型应用场景
智能主车(Host vehicle)在行驶的过程中传感器摄像头容易被附近车辆(Near Vehicle)阻挡,此时在HV的视野中相当于突然出现非机动车,没有提前反应的时间。与其他智能汽车变道的不同,非机动车的跨道行驶容易受到附近的车辆阻挡。与行人穿越NV 到达HV的视野不同,由于非机动车车身有一定的长度,非机动车在路面转弯时候会有一定的角度。再者,非机动车相对于行人有着更高的速度,即角速度更具有连贯性。因此,根据非机动车的角速度来判断非机动车的转向意图提供了依据。
2.1 非机动车转弯意向场景分析
非机动车在直道转弯上分为两种情况,一种是非机动车车身转角与智能汽车行驶方向垂直,这种情况可以直接对附近车辆进行预警。另一种是非机动车车身在初始阶段与智能汽车行驶方向一致,非机动车距离NV有安全距离,并且意图穿越NV进行转向,文章主要讨论后一种情况。
3.3 非机动车角速度的特性的研究实验
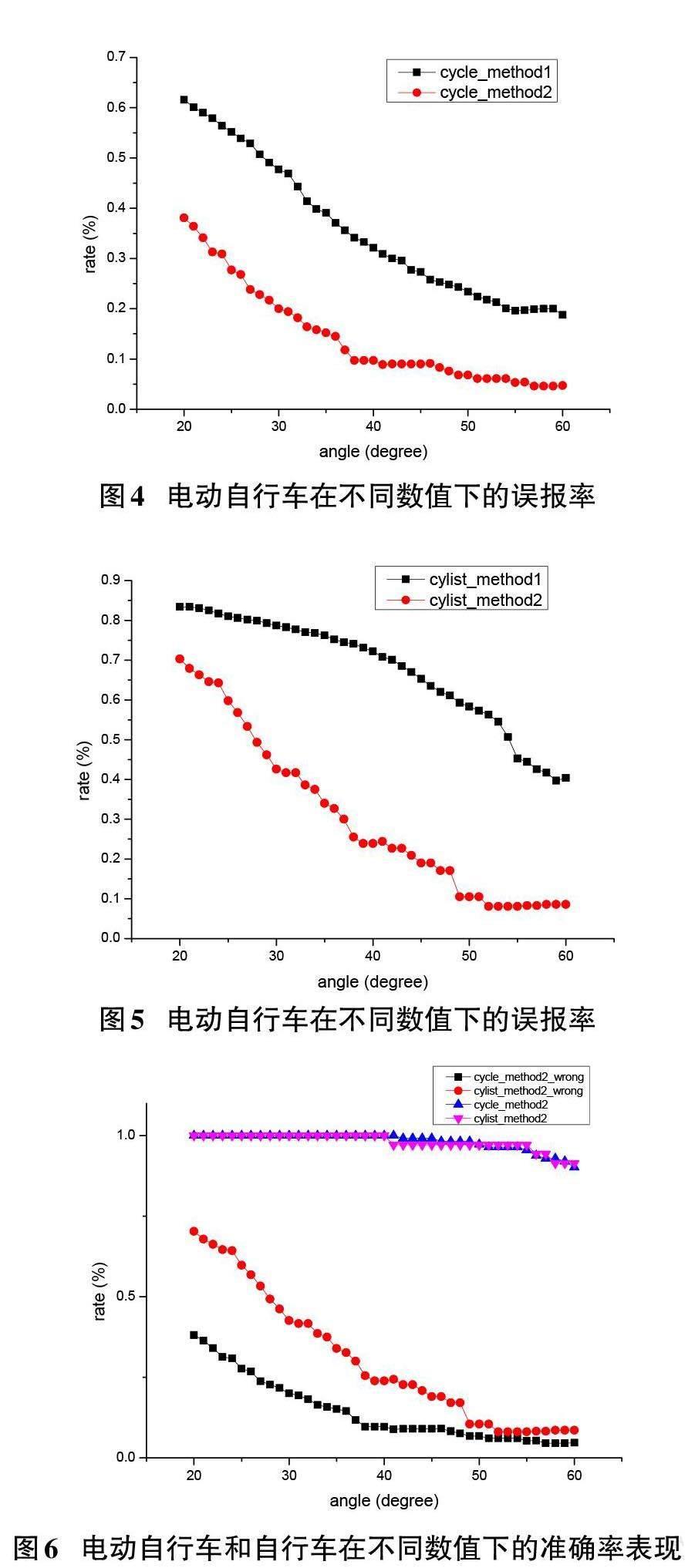
本文通过研究常数K1、K2在不同数值下对应方法的误报率表现。图4为电动自行车在K1、K2不同数值下的误报率表现,图5为电动自行车在K1、K2不同数值下的误报率表现。通过图4、图5可以看出,在研究角速度特性与非机动车是否转弯的判断中,考虑与非机动车与附近智能汽车单位矢量夹角的方法会比直接考虑角速度的变化有着更低的误报率。
本文通过研究常数K1、K2在不同数值下对应方法的不同准确率表现。图6为电动自行车和自行车在K1、K2不同数值下的准确率表现,在研究角速度特性与非机动车是否转弯的判断中,考虑与非机动车与附近智能汽车单位矢量夹角会有更好的准确率。另外,由于非机动车中,电动自行车相比自行车有更高的速度,在运用角速度特性分析方法中,速度更高的非机动车会有更低的误判率。
从图6中可以看出,在目前的采样频率下,权衡准确率与错误率的前提下,K1= 52中,利用角速度变化特性的优化算法在电动自行车转弯意向判断的准确率有96.4%,误报率为6.1%。K2= 52中,利用角速度变化特性的优化算法在自行车转弯意向判断的准确率有97.1%,误报率为8.1%。
本文从采样的频率对非机动车角速度转弯特性进行分析,图7是不同频率下电动自行车转弯特性判断的准确率,图8是不同频率下自行车转弯特性判断的准确率。由此可以得出,采样频率越高,用角速度特性判断非机动车是否转弯的准确度会越高。
4 結论
基于非机动车角速度特性的转弯判断算法对非机动车转弯判断有较高的准确性和较低的误报率,当检测频率越高,准确率越高。面向多车协同的非机动车转弯意向判定算法能够一定程度上让附近的车通过角速度检测探测前方跨越非机动车的转弯意向,从而对控制主车有提前反应的时间,从而在一定程度上保证了智能汽车与非机动车行驶的安全。
