通用传感器演示与检测模拟机器人的设计
2023-05-30谢玉胜
谢玉胜
普通高中最新版《通用技术》教材中的选择性必修一《电子控制技术》第四章《传感器与继电器》和普通高中最新版《物理》教材中的选择性必修二的第六章《传感器》中,缺少对常用傳感器件进行检测并兼具实用性和趣味性的教具。
为了增强教学趣味性,我设计并制作了一款通用传感器演示与检测模拟机器人。
一、设计思路
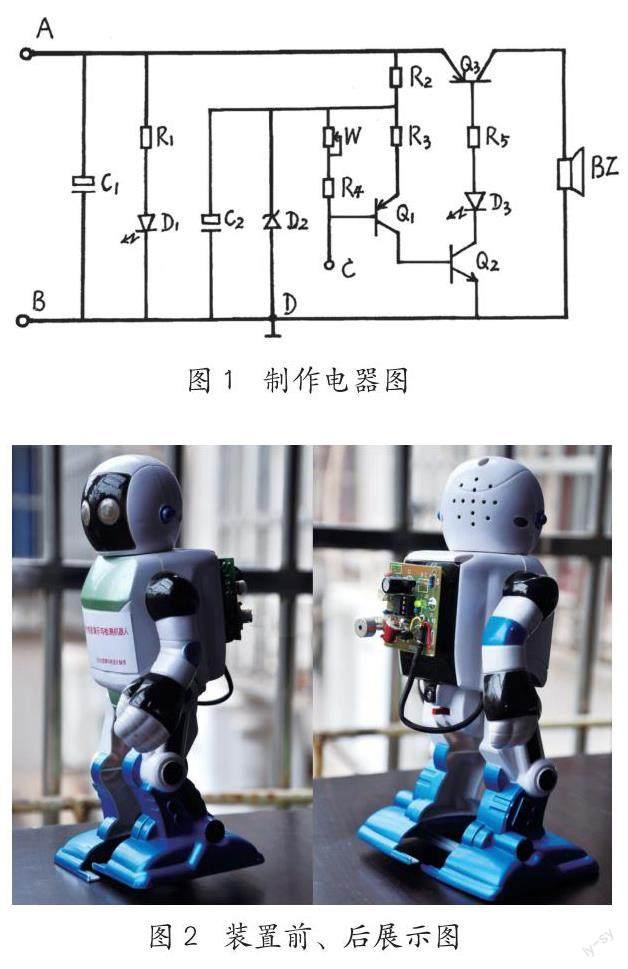
该项目采用人形机器人玩具及电子元件设计制作而成。电子线路装置安装在机器人玩具背面,其特点是:采用常见电子元器件制作一块信号放大电路与自适用可调电路板,电路板上设计了传感器件输入插座与灵敏度旋钮,通过调整灵敏度旋钮可检测不同的传感器件。测控电路是模拟电子技术和数字电子技术的进一步扩展与延伸。
二、制作过程
(一)装置的基本制作
根据设计方案,购置制作主控制器电路板和配套的电子元器件。
在焊接时以先焊小元件,再焊大元件,最后焊集成块的原则进行。集成块NE555采用双排8脚直插式结构,脚排列较密集,焊接时需用尖烙铁头快速焊接,并反复检查有无虚、假、错焊,有无拖锡短路造成故障。只有按上述要求焊接组装,才能确保设备正常工作。
先装配功能电路板,后焊接电机、电源部分的引线。打开机器人后盖,取出原有电机,将配好的接线焊在电机上,在机器人头部串连1N4148二极管,将电源与电机接线并从后背的孔引出,最后组装头和摇头杠杆后,盖上后盖即可(注意保证内部有足够活动的空间,避免被卡住)。装入3节5号电池,将电路板固定在电池外边,通过调节W2、W1控制设备前进、后退的时间。
(二)通用传感器件检测部分制作
通用传感器件检测部分采用电阻R1—R5,电容C1、C2,二极管D1—D3,三极管Q1—Q3,可调电位器W以及蜂鸣器BZ制作一块信号放大电路与自适用可调电路板,将传感器件探头C、D输入分别接红、黑接线夹安装在前面板上,电源指示灯(二极管D1)和工作指示灯(二极管D3)安装在前面板上,可调电位器W外接灵敏度调整旋钮。
最后将整块电路板安装在机器人背面,在电路板上设计一个传感器件插座,将灵敏度旋钮、工作指示灯装在电路板上。
三、使用注意事项
(一)本装置需搭配3节5号蓄电池使用。
(二)将要检测的传感器(如光敏电阻、热敏元件、红外传感器、压力传感器、磁力传感器等)插入插座,适当调整灵敏度旋钮,本装置接收信号后开始工作行走。行走距离与传感器接收的信号大小、灵敏度以及延时时间有关。
(三)调整灵敏度旋钮和兑换传感器件引脚,机器人不行走,表明所检测的传感器开路损坏;机器人一直不停地走,表明所检测的传感器短路或漏电损坏。
四、创新点
本教具既能演示具有各种感觉功能的第二代机器人的基本工作原理,又能检测多种通用传感器件性能的好坏、极性的判别。通过调整灵敏度旋钮,还能增强本教具的通用性。
五、进一步设想
装置简化输出模块暂未使用显示单元,能对多种通用传感器进行教学演示与检测,但不能对传感器进行精细检测和定量分析,也无法按照程序对机器人进行控制。后续将对此进一步开展研究改进。
