无人机航迹规划系统的设计与实现
2023-05-30金戎轩
金戎轩

摘 要:【目的】航迹规划程序UFP(UAV飞行规划)是无人机任务规划系统的核心,也是目前科研人员研究的重点。为了确保无人机能顺利完成各种作战计划任务,任务规划系统必须对各种战场因素进行综合分析。【方法】通过人工设计和操作,可直接将任务指令传输给无人机,基于.NET的无人机航线规划系统,使用数字高程模型图,并采用Dijkstra算法来寻找最优的飞行航迹。【结果】选择适合战场因素和自身性能指标的最优航迹,从而确保无人机能安全、按时抵达任务区域,并按任务规划来完成既定任务。【结论】无人机航迹规划系统作为当今战争的重要支撑,运用该系统能大大提高作战效能,进而巩固国防。
关键词:航迹规划程序;Dijkstra算法;航迹规划;高程模型
中图分类号:TP391.41;V249 文献标志码:A 文章编号:1003-5168(2023)06-0023-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2023.06.004
Design and Implementation of UAV Flight Planning Program
JIN Rongxuan
(Electronic Engineering College,Xi'an Aeronautical University, Xi'an 710077,China)
Abstract: [Purposes] The path planning program UFP ( UAV flight planning ) is the core of the UAV mission planning system and the focus of current research. In order to ensure that the UAV can successfully complete various combat planning tasks, the mission planning system must comprehensively analyze various battlefield factors. [Methods] Through manual design and operation, the task instructions can be directly transmitted to the UAV, whose route planning system based on. NET uses digital elevation model diagram and Dijkstra algorithm to find the optimal flight path. [Findings] The optimal trajectory suitable for battlefield factors and its own performance indicators is selected to ensure that the UAV can reach the mission area safely and on time, and complete the established task according to the mission planning. [Conclusions] As an important support for today's war, the UAV track planning system can greatly improve the combat effectiveness, make China's international standing more firm, and contribute more to China 's national defense.
Keywords: UFP; Dijkstra algorithm; flight planning; DEM
0 引言
無人机(Unmanned Aerial Vehicle,UAV)的诞生可追溯到1914年。当时正处于第一次世界大战的初期阶段,英国的卡德尔和皮切尔两位将军向本国的军事航空学会提出一项建议:研制一种不用人驾驶,而用无线电操纵的小型飞机,使其能飞到敌方某一目标区上空,并将事先装在小飞机上的炸弹投下去。时至今日,随着航空技术的飞速发展,无人机也逐渐步入鼎盛时期,世界上研制生产的无人机已近百种。而随着计算机技术、自动驾驶技术和遥控遥测技术的发展和应用,以及对无人机战术的研究,无人机在军事领域中的应用也日益深入。军用无人机具有无人员伤亡、使用限制少、隐蔽性好、效费比高等特点,从而使其具有极其重要的战略性意义[1]。
无人机可根据人类制定的规则来完成或执行各种任务,如何准确、完整地给无人机制定任务,就要对其进行规划。恰恰是因为“无人”的特点,无人机更依赖于任务规划系统。因此,无人机任务规划是无人机完成任务的重要一环[2]。
1 无人机任务规划
1.1 无人机任务规划系统
无人机任务规划是根据无人机执行的任务来展开的,是对无人机要完成的具体军事任务提前进行设计规划和统筹安排。无人机任务规划系统根据作战环境的具体情况,全面考虑无人机状态、性能、到达指定区域的时间、燃料消耗、威胁风险及空域等制约条件。由此,给无人机完成任务设计出一种或多种从起飞到打击目标为止的最佳或适合航迹,同时设定测控数据链、载荷的配置参数以及控制工作计划,从而确保无人机能顺利、完美地完成打击任务,并安全返回军事基地[3]。无人机的任务规划系统主要规划功能如下。
1.1.1 航迹规划。航迹规划是指对无人机从起飞点到打击目标点的航线进行优化,并对规划好的航线进行检查核实。在设定航迹时必须考虑环境对飞行的影响,无人机的性能必须满足飞行要求,确保规划航迹的可行性。因此,在制定航迹规划时,主要工作有规划算法的使用、实时信息的收发和处理、威胁突防模型的设计等[4]。
1.1.2 数据链规划。根据战场的电磁分布情况和频率管控要求,制定不同飞行航迹阶段控制链路的使用战略规划,包括卫星链路的选择,使用频点、时段、工作频段及控制权的交互等。
1.1.3 任务载荷规划。根据情报和作战信息,合理安排无人机的载荷资源,并确定载荷设备的工作模式。
1.1.4 任务应急处置规划。针对突发情况,可提前规划好应急航迹、备降、返航航跡,并对链路故障等问题进行应急处置。
1.1.5 数据加载和生成。将制定好的航迹规划、数据链规划、载荷规划、应急处置规划等自动生成任务,并通过数据加载模块和数据链路模块,将数据加载到无人机任务规划系统中[5]。
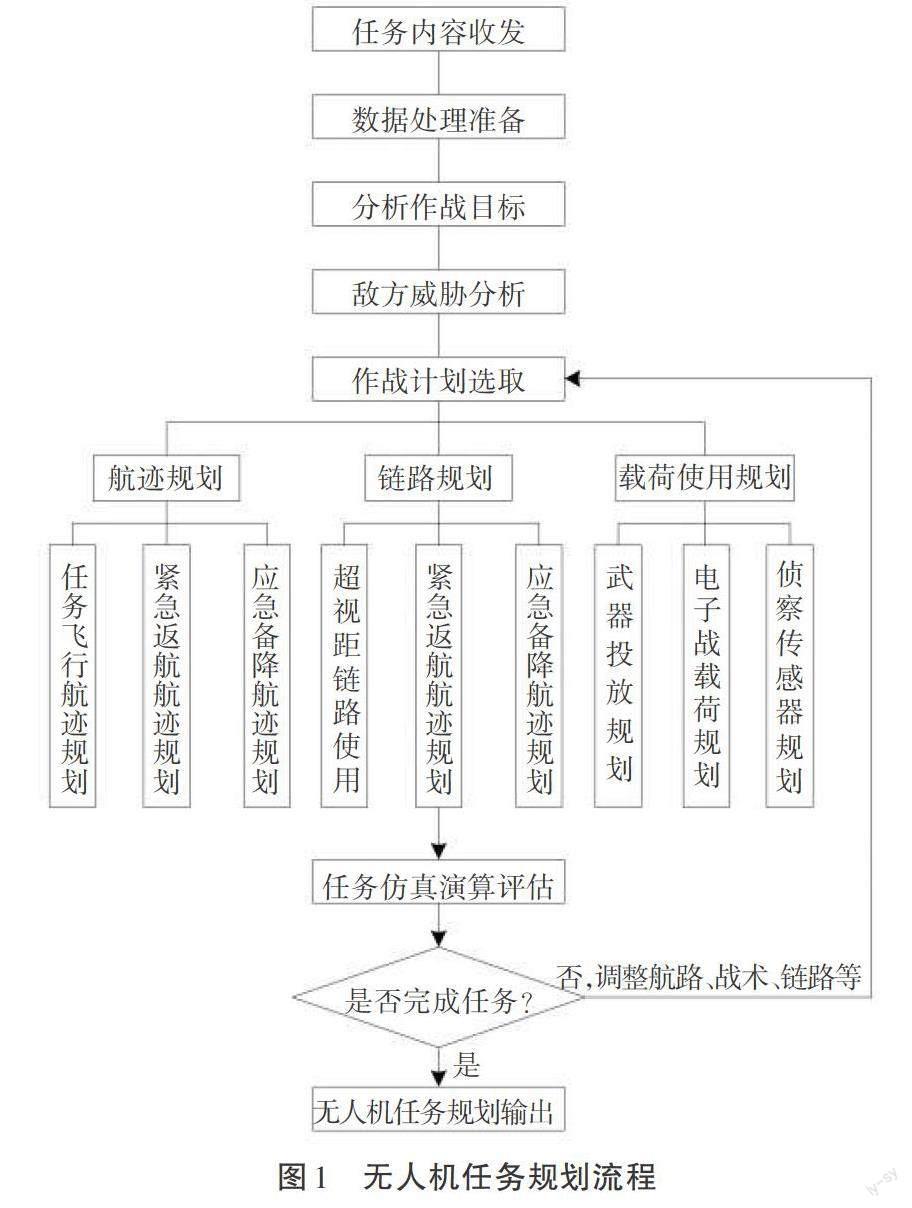
无人机任务规划系统流程如图1所示。根据无人机任务规划的基本流程,其可适应任何情况下的作战任务,并完成相关任务。
1.2 无人机任务规划系统功能展望
1.2.1 软件的通用性和兼容性。通用化的任务规划系统软件应具备通用的运行平台、标准的基础架构、兼容的数据格式、统一的操作方式、完善的操作界面等,还具备对不同型号无人机任务进行规划的能力,能满足未来无人机“一站控多机、一机多站控”的发展需求[6]。
1.2.2 实时动态规划。尽管在任务开始前,要对无人机制定详细完整的任务计划,但在实际任务执行过程中,战场态势瞬息万变,此时就要对无人机已制定好的任务计划进行实时调整。一方面通过分析处理变化的战场态势信息,通过人工来实现调整、更改无人机任务规划,另一方面通过嵌入的自动航迹规划和任务选取算法来实现自动调整,并更改无人机的任务规划。
1.2.3 智能自主规划。在如今高科技体系作战环境中,战局环境会随时发生改变,这就要求无人机任务规划系统能及时、准确地自主调整和重新规划任务,减少人工干预,并降低对数据链系统的依赖,从而实现智能化的自主任务规划[3]。智能自主规划的实现需要人工智能技术的进一步发展,这将是任务规划的终极目标[4]。
2 无人机数字地图技术
无人机在执行任务时需要有“环境”的支撑,其在无人机任务规划系统中被称为任务规划环境。实际上,数字地图是任务规划环境的重要组成部分,而无人机任务规划系统正是基于数字地图平台,通过对战场环境进行分析来实现的[5]。在任务规划系统中,航迹规划是最核心的部分。无论是人工的方式,还是自动的方式来实现无人机飞行任务航迹的调整和规划,都是在地理信息系统或数字地图上实现的[6]。
地理坐标系采用的是全球统一的坐标系,用维度和经度来表示地球上的每一个点。把地球当作椭球体,将所有含有地轴的平面与椭球体的交线称为经线,所有垂直于地轴的平面与椭球体面的交线称为纬线。
以地球椭球体中心O为坐标原点,用X、Y、Z三条互为直角的坐标轴来表示空间中某一点位置的坐标,被称作空间直角坐标系,其与基本的大地坐标系能相互转换。在完成椭球体的定向与定位后,就能确立大地坐标系。目前,我国已制定了三种国家大地坐标系,分别是1954北京坐标系、1980西安坐标系及2000国家大地坐标系[7]。
在使用数字地图时,通过将地球椭球体上的经线、纬线网格转换成平面上相对应的经线、纬线网格的方法被称为地图投影。由于球面转换成平面必然会发生投影变形,也就会存在误差。为了减小误差,有研究者提出多种投影方法,常用的有正圆柱、圆锥投影。而军方对精度的要求比较高,常用高斯-克吕格投影[8]。
基于.NET的无人机航线规划系统使用的数字地图是数字正射影像图、数字高程模型图等[9]。其中,数字高程模型是数字地图的关键要素之一,在数字地图的应用中发挥着重要作用。无人机任务规划系统离不开数字高程模型,包含整个航线规划、链路规划及载荷规划等。数字高程模型(DEM)是用一组有序的数值阵列来描述地球表面高程或海拔高程信息及空间分布的数据集,同时也是对地球表面地形地貌的一种离散的数字表达[10]。
在无人机任务规划中,必要条件是获取作战任务区域的DEM。为了得到某些不在网格点上的特定地点的高程,要对任务范围内的数字地图进行插值处理,在任务规划系统中引入插值算法。考虑到飞行器的飞行安全和有效航程,就要在系统中对实际地形进行平滑处理,尽可能实现地形跟随飞行,提高无人机飞行的安全性和机动能力。
3 无人机航线规划
航迹规划是无人机任务规划系统中的核心内容,也是目前科研人员研究的重点。为了确保无人机能顺利完成计划的作战任务,任务规划系统就要对不同的战场因素进行综合分析,为无人机制定可行的飞行航迹,并采用合适的航迹规划算法,选择适合战场因素和自身性能指标的最优航迹,从而确保无人机能安全、按时抵达任务区域,并按任务规划来完成既定任务。
基于.NET的无人机航线规划系统一般是按照以下步骤来对航迹进行规划的。①根据任务需求及任务区域的信息来确定航线规划的空间模型。②根据UAV性能指标及链路和载荷的性能,来确定航线规划的数学模型。③通过嵌入合适的航迹规划算法,得到一条最优的航迹。④根据得到的航迹进行插值、平滑处理等,对航迹空间模型进行调整,并改进或重新规划航线。⑤输出最终的航迹规划数据,并下达指令至无人机,执行飞行操作。
综上所述,无人机航迹规划系统的核心是通过航迹规划算法来寻找最优的飞行航迹,使无人机能安全、准时抵达任务区域,从而有效完成作战任务。为了能达到最佳的性能和效率,要从最短航迹距离、最大飞行安全可靠性、最小燃料消耗、最佳飞行高度等角度出发,进行算法分析。本研究介绍一种改进过的搜索算法,即Dijkstra搜索算法。
Dijkstra搜索算法充分考虑当前节点与起始节点之间的距离代价值,对实际的路径规划问题,从起点到斜对着的相邻方格的距离往往会比其他的要大。假定每个方格大小为10,按照Dijkstra算法,该距离就是当前代价函数g(n)所取的值D(n,S)。如果按g(n)值从小到大进行排序,从而优先选择出排在最前面的方格节点,并进行下一步扩展。接下来,按照相同的方法,再优先选择g(n)值最小的节点进行扩展。通过这样的方式,就能很快找到一条到达目标节点的最短路径。可以看出,Dijkstra算法按g(n)值由小到大的顺序重新排列OPEN表中的所有节点,即按g(n)值大小对OPEN表进行排序,根据路径长度及最后进入CLOSED表的总节点个数,找出一条最短的路径[11]。
由于Dijkstra搜索算法在算法流程上与通用图搜索算法一致,非常容易实现。Dijkstra算法流程如图2所示。
4 航迹规划软件界面实现
4.1 总体功能
UAV飞行规划(UAV Flight Planning,UFP)的运行环境为2000年以后发行的各版本Windows操作系统,要安装.NET Framework 4.0。UFP软件实现的主要功能有以下两点,即基于二维坐标视图的单条UAV航线创建、查看和修改功能,以及航迹数据的文件存储和文件读取功能。
4.2 程序菜单栏设计
UAV航迹规划程序菜单栏包括以下三个部分,即文件、航迹设置和软件其他信息。文件栏包括六个基本选项,即新建航线、打开航线、保存航線、另存为、清空航线和关闭程序。航迹设置栏包括六个基本操作选项,即航线、设置、UDP、发送数据、测试连接、UDP配置。软件其他信息栏包括关于、帮助、版权信息等选项。
4.3 航线数据工具栏设计
航迹数据工具栏有多个编辑菜单,包括七个功能选项,即开始编辑/关闭编辑,新建点Point、生成直线Line、生成圆弧线Arc、上移点、下移点、删除选中对象及刷新等。
4.4 航线数据显示设计
航迹数据是由多个点、点间的连线组成的数据表,组成情况见表1。其中,点为坐标点,由名称、纬度、经度、高度组成。两点之间的连线有两类。①直线Line。由开始坐标、结束坐标构成。②弧线Arc。既可由圆心坐标、半径、开始角度、结束角度构成,也可以由起点坐标、结束点坐标、圆心坐标构成。
表1中圆弧线A1的起点为P2、终点为P3,如果这两点已确定,那么弧线圆心的坐标不能完全确定,每次应通过起、终点和假定的弧线圆心坐标来计算出近似点坐标值。
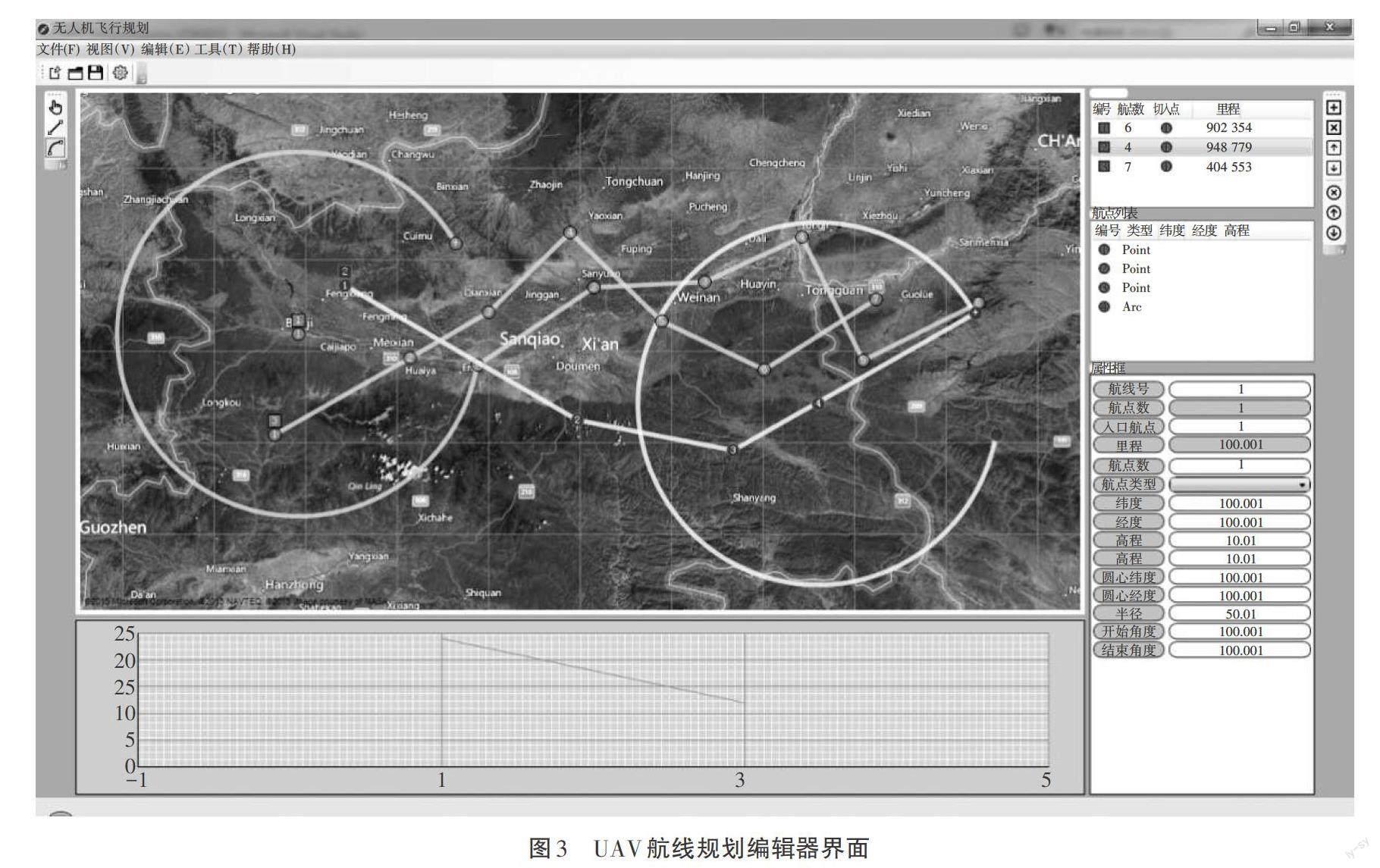
4.5 航线规划系统软件界面
按照UAV航迹规划程序菜单的操作,可在无人机加载数字地图后基本实现对航迹规划飞行的控制,从而为无人机制定出可行的飞行航迹,采用合适的航迹规划算法,选择适合战场因素和自身性能指标的最优航迹,从容确保无人机能安全、按时抵达任务区域,并按规划完成既定任务。无人机航迹规划编辑界面如图3所示。
通过航迹规划,可实现同一时空下合理的飞行轨迹和任务安排,找到最优航迹,确保无人机安全、按时抵达任务区域,并按任务规划来完成既定任务。
5 结语
随着以无人机为代表的高科技无人化装备的应用,“航线任务规划”已成为军事中的重要一环,体现出完全有别于传统军事规划的安排。一方面从规划内容上来看,其已完全超出对作战任务的既定指挥和单一的定量计算,对作战全流程的详细规划是通过数字化、精准化、自动化模式下的作战环境、作战配置及作战方式来体现。另一方面通过人工设计和操作,直接将任务指令传输给无人机,信息化的任务规划与装备作战紧密结合,使作战的有效打击能得到大幅度提高。
参考文献:
[1]董汗清,孟凡计,王玉文.无人机打击效果评估系统研究[J].通信技术,2012(7):72-74.
[2]邢立宁,陈英武.任务规划系统研究综述[J].火力与指挥控制,2006(4):1-4.
[3]毛红保,田松,晁爱农.无人机任务规划[M].北京:国防工业出版社,2014.
[4]朱宝鎏,朱荣昌,熊笑非.作战飞机效能评估(第二版)[M].北京:航空工业出版社,2006.
[5]张婷婷,柴来.多无人机多目标路径规划[J].指挥信息系统与技术, 2020(6):32-36,46.
[6]赵梵喆,林跃,杨永琪.基于多目标规划的无人机路径规划[J].价值工程,2020(9):208-210.
[7]宋伟中,王行业,王宁.一种面向无人机区域协同覆盖的感知任务分配方法[J].计算机应用与软件,2021(5):75-81.
[8]龙恒.一种基于UDP的可靠数据传输协议[J].计算机时代,2020(4):33-37.
[9]张子千.无人机通信系统研究[J].南方农机,2019(4):111-112.
[10]戴定川,盛怀洁,赵域.无人机任务规划系统需求分析[J].飞航导弹,2011(3):66-70.
[11]王东亮,万幼川,徐景中,等.基于DEM的机载LiDAR航线设计[J].测绘科学,2011(1):116-118.
