仿生蛇形新能源汽车自动充电装置研制
2023-05-29裘应驰
裘应驰
(浙江纺织服装职业技术学院 机电与轨道交通学院,浙江宁波,315000)
0 引言
国务院印发的《“十四五”节能减排综合工作方案》指出,倡导简约适度、绿色低碳、文明健康的生活方式,营造绿色低碳社会风尚[1]。随着能源技术的发展与环境问题的挑战加之国家政策的支持[2],新能源汽车已经逐渐进入了人们的视野并受到了极大的关注,成为了未来发展的重点方向。
目前新能源电动汽车的充电方式主要采用手动充电、换电等方式,在无人自动驾驶飞速发展的今日,新能源电动车自动充电过程并没有很好的做到无人化[3]。而在现在科技发展的今天,无人化的推进在社会进步中是大势所趋,同时新能源电动汽车自动充电更加能够解放车主,能够做到即停即充,满电自动复位给车主以最佳的体验[4]。
1 系统方案
设计的仿生蛇形机械臂将仿生特点、安全性、实用性、便捷性、创新性、时尚性相结合。该机械臂主要包括四个部分,即包括身体执行端与扩展部分、驱动拉线装置、绳索引导框架与控制装置。
1.1 身体执行端
仿生蛇形新能源汽车自动充电装置,通过SolidWorks软件设计了自动对接系统的机械结构部件。在试验阶段使用Simplify3D 打印对活动关节模型进行制作,使用生物降解PLA 材料及50%的填充率,既保证了支撑结构的刚性强度,也遵从了可持续发展的理念。样机的底座采用了玻纤材料,保证了基座的结构钢性,加工方式采用激光雕刻。
底座如图1(a)所示,通孔皆为引导牵引线的路径,每段关节对齐的通孔使关节的弯曲形状更趋于等曲率圆弧。
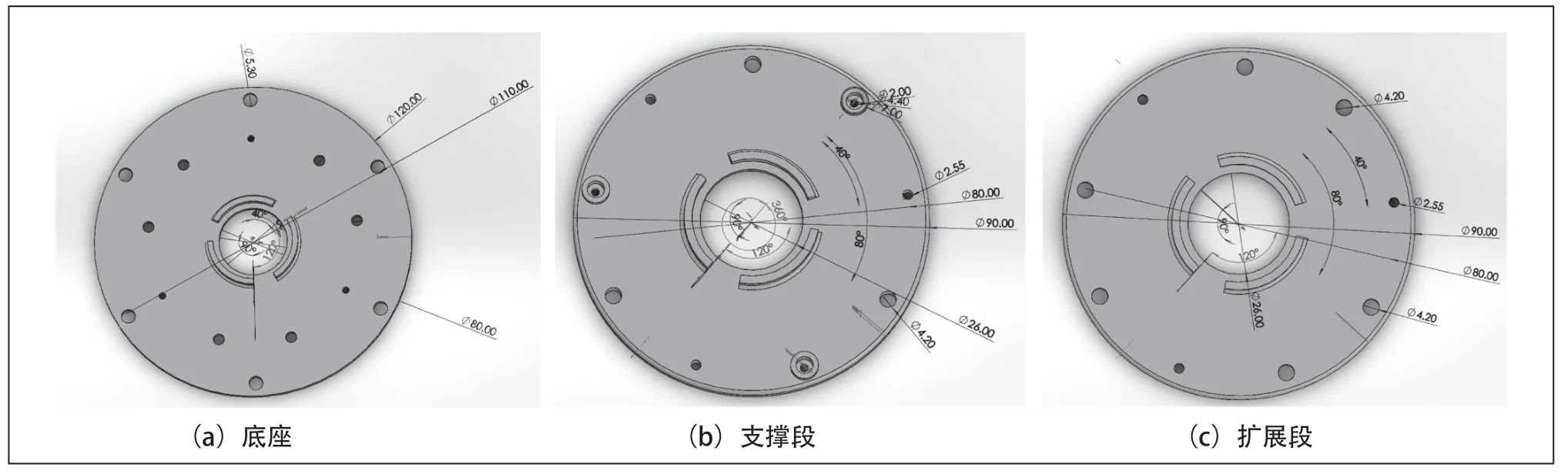
图1 充电装置身体执行端构成
每个关节的支撑平台直径为80mm,间隔120°的三个台柱用以固定每个关节的合金丝,每个支撑平台如图1(b)所示,该片关节面既作为下一节身体的向导,又作为上一节身体的基座。
由于蛇弯曲前进时并不能做到每节脊骨都能有很大的形变,一般25~35 节脊骨为一组组为一个弯曲组;故在设计本装置时也同样采取段中多节的形式,使得将整段120°的弯曲分散在3 个段中,其运动形式更贴近于蛇形,其扩展段如图1(c)所示。
三个独立运动关节中每个关节段最大俯仰角θ 为0~120,周向角φ为0~360,径向运动距离0~30mm 其运动范围足以满足电动车充电需求。图2 展示了充电装置的两个仿真充电位置。

图2 两充电位三维仿真图
1.2 驱动拉线装置
该部分由9 个M2006 p36 无刷减速电机、电机支架、导轮、引导机构、玻纤板(基底)、长包角和金属方柱等组成。电机出轴端使用了直径40mm 的金属圆带轮,槽底直径35mm,为了使合金丝能够更准确的卷入缠绕轮,在设计中采用特殊的理线机构在引导合金丝的同时可以使其不容易离槽,设计图如图3 所示。由于该装置结构较为紧凑,动力源使用三层布局,故在其中加入了引线装置,保证牵引合金绳索不会出现挤压变形,扭转等情况。

图3 支撑及驱动单元整体结构
该装置由连续体本体和驱动模块组成。充电装置本体的运动状态由9 个电机转动来进行间接控制,该装置的多自由度运动是在多组引导索联动下完成的。
可实现当车辆位姿发生变化时,机械臂能够及时应对这种变化作出调节,防止蛇形臂和充电座受到过大的外力,延长蛇形臂的维护间隔和使用寿命。
2 运动求解
2.1 运动学计算
柔性支撑骨架采用弹簧材料,具有较高的抗拉压和扭转刚度。牵引驱动绳索为9 根钛镍合金丝,绳的连接点均匀分布在蛇形身、底座和电机导轮上,通过驱动电机牵引钛镍合金丝,可实现多关节运动。
经过模型的简化,将每个单独关节的曲率设为恒定值,此时定义关节中的三个变量,分别为单关节长度L,圆弧的圆心角θ 和底座平面OO′O"和前视截面平面XOZ的旋转角度φ。模块的多自由度弯曲运动。充电装置中单节模块运动学简化模型如图4 所示。

图4 绳驱动单关节模块运动学简化模型
通过本文装置的机械结构不难得出,计算过程中使用一个4×4 的矩阵来表示其单关节首端坐标系到末端坐标系的齐次变换矩阵,即:

所有关节节点都是等曲率的圆弧模型,经过推导可得第n 关节段坐标系{n}到第1 关节段坐标系{l}之间的齐次变换矩阵为:
2.2 空间量转换
本文中蛇形充电装置每个关节姿态的变化都由穿过关节的绳索长度决定,计算过程中建立了从关节空间与绳索长度的映射关系。
每段关节两关节基座之间距离长度为h,该成都不会随着装置整体运动而改变长度;处于两个导线圆盘之间的部分钢丝索长度分别为 0l、1l和l2。假设连续型机器人有n个关节,则其直立状态时驱动线长度为:
在实际中本文以逆时针方向对圆盘导线孔进行编号,每两个到线孔之间的夹角为α=120°。在充电装置弯曲时,设第i关节段的关节变量为(θi,φi),由几何法分析可得到第i关节,第j个孔的驱动线长度为:
由于所有穿过装置底座的驱动线线长都会随装置运动而发生改变。上位机会进行驱动线整体变化量的计算,第j导线孔驱动线总线长Δlj变化量为:
3 控制方案
3.1 系统结构
蛇形机器人通过其控制系统实现多个驱动装置的协同工作。控制系统的主要组成部分包括:上位机,主控制器,电机控制器等。
其中,上位机主要负责人机交互,机械臂运动学动力学建模和求解,任务轨迹生成,控制指令的发送等工作。主控制器主要用于机械臂的基本逻辑控制,多个电机的协同,指令下发等工作。电机控制器主要用于电机的位置,速度和力矩的控制。
控制系统的原理如图5 所示,上位机与主控制器采用串口通信的方式,将控制指令发送到主控制器。主控制器根据上位机指令完成所有电机的位移、速度或电流的解算,将结果发送到电机控制器的第两路CAN 总线。同时,电机控制器也通过CAN 总线接收无刷电机调速器反馈的电机编码器信息。
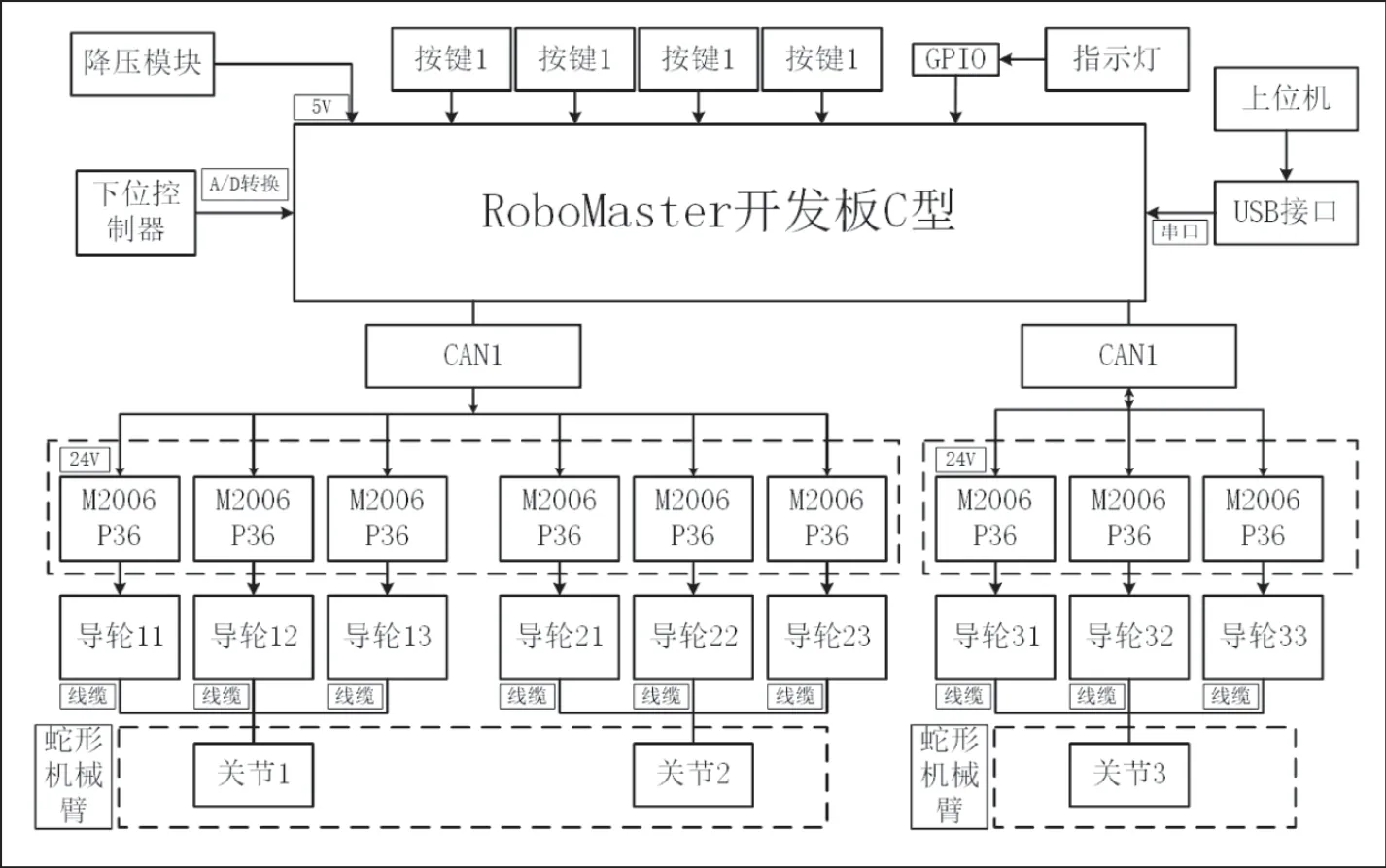
图5 主控系统架构
3.2 软件设计
软件设计主要分为三部分,即初始化、运动学逆解和输出控制部分。蛇形充电桩总控制流程如图6 所示。

图6 控制流程
初始化部分会在每次充电操作执行前运行,9 个电机自动运行至所设原点。外部传感器获取汽车充电口坐标,送入上位机中的逆解程序部分,经过牛顿-拉夫森迭代法进行逆运动学解算计算出9 根牵引绳索的绝对长度和电机旋转角,通过特定协议传送给下位控制板,控制电机运行。
4 组装及调试
根据设计结构图,将整个装置的机械结构进行装配;根据电气原理图将各个电气元件合理排布,安装;完成蛇形充电装置的平台搭建。其中绕线机构、电机、电调和主控板等部件置于底部箱体中,主控与计算机的连接通过USB 线完成。
蛇形机械臂的位姿规划对机械臂完成任务要求极其重要。其位姿规划数据如表1 所示。

表1 充电装置位姿规划数据
当装置运行到充电位时其各电机运动参数如表2 所示。装置运行实物图7 所示。
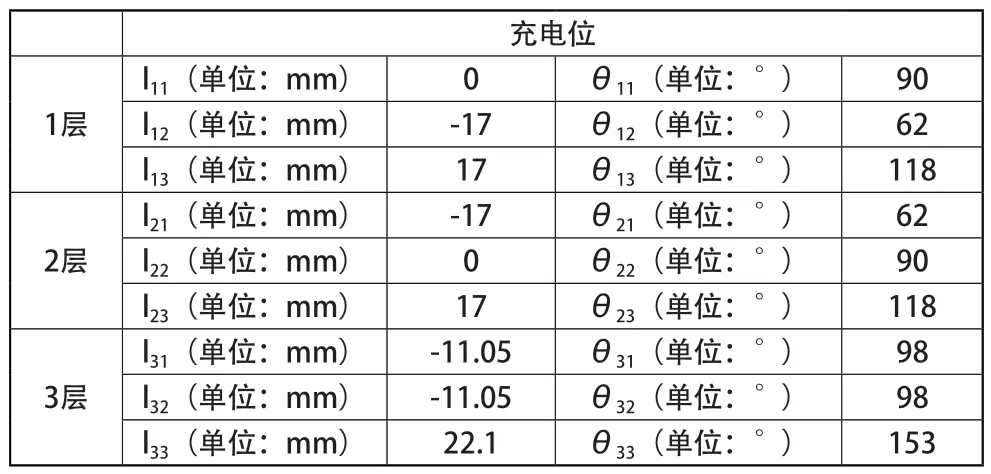
表2 充电装置运动数据
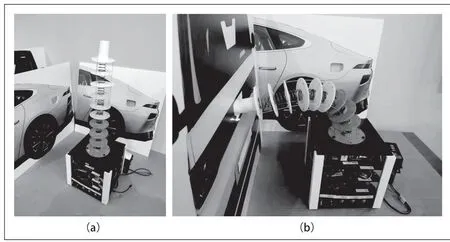
图7 充电位实物图
5 结语
随着新能源电动汽车技术的不断发展,充电设备逐渐走进每家每户。通过智能的自动充电设备,能够很好的改善目前新能源汽车充步骤繁琐的问题;同时在商业领域,该充电桩装置的研发,在提高充电站的无人化管理程度的同时,能够有效的降低管理经营成本。
仿生蛇形新能源汽车自动充电装置的研制可极大地提高用户的使用体验,提高新能源汽车充电的便利性和操作安全性;有利于未来自动化驾驶,自动泊车等自动化体系的发展。