基于AHP层次分析法的履带式智能消防机器人设计研究
2023-05-27侯建军毛轶超陈利陈文敏
侯建军,毛轶超,陈利,陈文敏
基于AHP层次分析法的履带式智能消防机器人设计研究
侯建军,毛轶超,陈利,陈文敏
(南京工程学院艺术与设计学院,南京 211167)
建立消防机器人功能需求指标,将人工智能技术与消防机器人功能结合,设计一款具有无人机监测的智能履带式消防机器人。通过文献研究、市场产品分析,运用KJ亲和图法建立消防机器人功能需求指标;通过问卷和访谈法及AHP层次分析法计算得出各功能指标的权重值,并完成一致性检验;再通过设计实践法从设计定位、设计效果图、结构分析、功能分析、人工智能技术应用、智能控制系统设计、数据模块分析步骤及界面UI设计等流程,完成智能消防机器人的设计实践。得出消防机器人需求指标目标层1个、一级指标4个和二级指标13个,其中一级指标的重要排序为安全性、功能性、智能性和美学性,消防员对机体防爆性、机体耐火性、爬坡/越障/避障功能评级较高,同时希望具有智能分析火源、规划行走路径、无人机巡查等功能。将研究结论和设计实践相结合,设计了一款具有监测无人机的智能消防机器人,通过路空两种模式相互配合,无人机可巡查并规划路径、智能分析、定点监控和火情报警等功能,消防机器人可具有进入危险火场完成灭火和救援等功能。
消防机器人;AHP层次分析法;监测无人机;人工智能技术
多年来,在与火灾的斗争中,消防员总是冲在事故的最前线,不仅会面对许多高温、毒气、浓烟、爆炸、坍塌等极其危险的环境,同时也会带来不必要的人员伤亡。消防机器人属于极端环境下的灭火设备,具有防辐射、远程遥控、行走、水炮姿态控制、灭火等多种作业功能。随着人工智能技术的发展,将其技术应用在消防机器人中,可更加准确地检测和评估火场环境,智能分析最佳的灭火方式,实现生命体征识别、搜救、精准灭火等功能。
1 消防机器人概述
1.1 消防机器人的市场现状
消防机器人按照功能分为履带式消防机器人、攀爬式消防机器人、多功能消防机器人、大型消防机器人等[1]。按照运动机构又分为包括履带式、腿式、轮腿式和轮式履带式等[2],不同的移动方式在不同的应用环境中各有优势。其中履带式机器人可跨越较为复杂的地面环境,且灭火喷水作业时,机体可承受较强的后坐力,故市场上应用较广。
随着1986年日本彩虹五号消防机器人的第一次亮相,2012年美国CHARLI-2消防机器人在战舰上服役,目前,国外的消防机器人向更智能化的方向升级,如Boston Dynamics的SpotMini和Atlas机器人、澳大利亚TAF20消防机器人、德国LUF60型雪炮消防车、美国消防机器人SAFFIR和日本新款火灾救助机器人等。
我国的消防机器人多为传统机械类,侧重消防功能,对智能化方面的研究相对不足。目前,北京凌天、极创科技、宁波华狮等公司已经有消防机器人的成品售卖,一些大型城市的消防部门也开始配置消防机器人用于实战,如洛阳中信重工的履带式消防机器人、德州力维的智能消防机器人、上海交大的消防跳跃机器人等。同时,一些概念设计,如智加设计公司的消防机器人、“赤烈勇士”消防机器人等使消防机器人造型和功能更为丰富。国内外消防机器人设计见图1。
结合市场上已有的消防机器人和一些概念机器人的造型和功能,进行市场风格及未来趋势分析,发现已有的消防机器人多集中在机械性和单一功能上,智能化和多功能的消防机器人相对较少,市场产品需要进一步智能化升级,见图2。

图1 国内外消防机器人设计
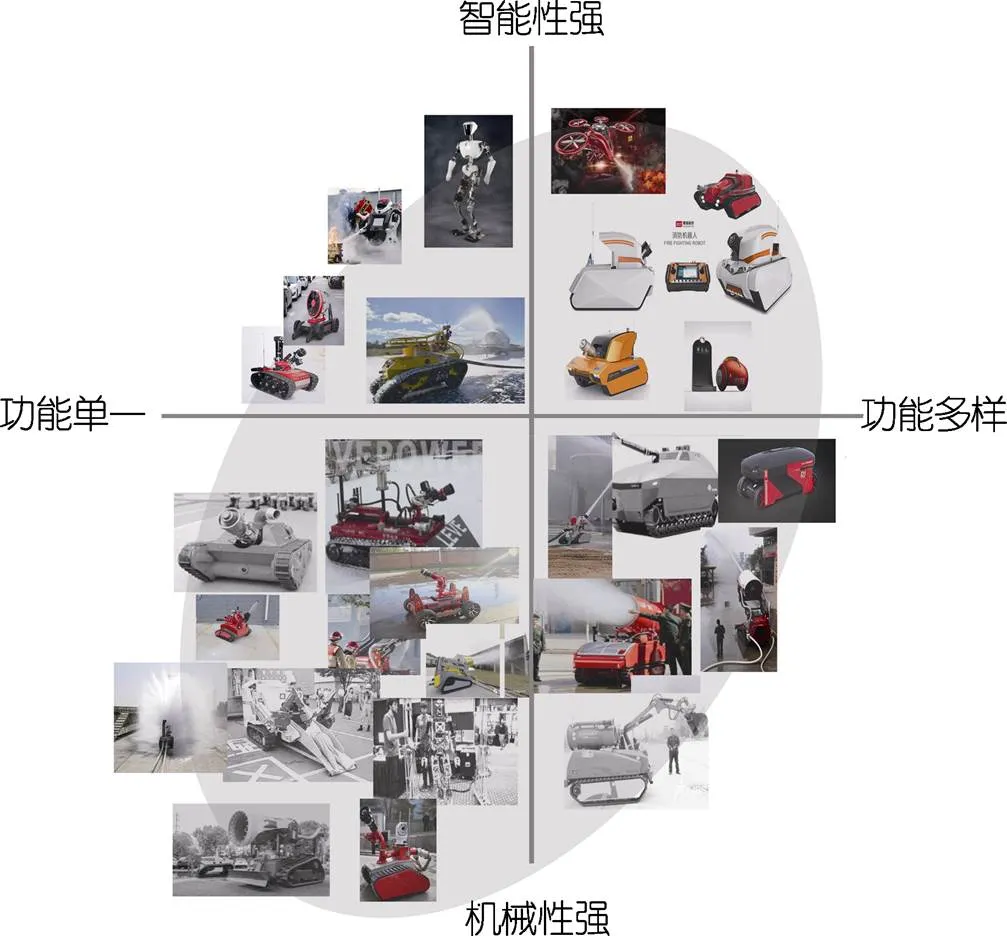
图2 消防机器人市场风格与未来趋势分析
1.2 消防机器人的技术研究
国外消防机器人的技术研究从20世纪80年代就已开始,比较典型的研究有:Zhou等[3]开发关联神经网络在线算法,以实现消防机器人对外部环境的探测功能。Dearie等[4]设计并实现一款具有环境感知、导航、探测的智能消防机器人。Altaf等[5]开发具有差分驱动控制、避障、环境传感、电路设计和导航等功能的消防机器人。李彬等[6]研究红外测距传感器及远红外火焰传感器以实现距离和火源的监控。Parmar[7]使用一种基于火焰模式算法,使消防机器人可以检测火焰位置。同时,许多研究者应用STM32系统实现消防机器人的控制,如Ye等[8]和Gao等[9]。Rakib等[10]研究多传感器火灾探测系统(MSFDS),实现多传感器火灾探测自主消防机器人。Raju等[11]利用Arduino UNO微控制器完成双模消防机器人的开发与实现。Liu 等[12]设计了一种紧密结合的导航定位模型,可实现火灾机器人在烟雾场景中的精确定位。
我国消防装备相关研究部门从1997年开始对消防类机器人进行开发和研究,2002年上海交通大学和上海消防研究所成功完成履带式、轮式消防机器人的研发。随着机器人竞赛兴起,对竞赛类消防机器人的研究也较为集中。以ARM9微处理器的消防机器人研究人员有:李彬等[6]、席文姣等[13]、朱彦亮[14];基于C51单片机的智能消防机器人的设计与研究人员有:程丽娜等[15]、肖明俊等[16];基于STM32的智能消防机器人的设计研究人员有:张飞飞等[17]、杨斌等[18]、姚蕴珍[19]等。
综合文献研究发现,随着计算机、传感器、图像处理技术的发展,使消防机器人在避障、火源定位,远程遥控等功能上不断加强,虽然人工智能技术已开始在智能产品中应用,但在消防机器人上的理论研究和设计实践较少。
2 AHP层次分析各功能需求要素权重
层次分析法是一种将复杂问题系统化的方法,可将复杂的决策问题建立层次结构模型,得出决策方案相对重要性的排序[20]。本研究在构建层次化功能指标体系后,通过访谈调研,运用层次分析法分析消防机器人的各功能需求指标,得出各指标权重值,并完成一致性检验。
2.1 基于KJ亲和图法建立消防机器人功能指标
KJ亲和图法是将处于混乱状态中的语言文字,通过其内在相互关系加以归纳和整理,然后找出解决问题新途径的方法[21-23]。
消防机器人设计要素的选择是一个涉及多层次、多因素、多指标等诸多因素的集合。在评价指标选择时,通过收集相关专家和设计人员意见,借助KJ法将收集到的资料进行归类,并对评价指标要素进行补充、筛选。通过以上分析方法,最终确定消防机器人层次结构:目标层1个(1消防机器人功能需求)、一级指标4个(1智能性、2功能性、3安全性和4美学性)和二级指标13个(1智能性包含:1无人机巡查、2智能分析火源、3外部环境分析、4规划行走路径;2功能性包含:5水柱和水雾切换、6无线遥控功能、7爬坡/越障/避障功能;3安全性包含:8机体耐火性、9机体防水性和10机体防爆性;4美学性包含:11色彩、12材质和13造型。
2.2 构造判断矩阵并计算各指标权重
本研究选取20名一线消防员组成决策者,对各评价指标用1—9的比例标度进行两两比较,判断矩阵如下:
表1 一级指标下各评价指标权重值

Tab.1 Weighted value of each evaluation indicator under first-level indicators
表21智能性标准层下各评价指标权重值

Tab.2 Weight value of each evaluation indicator under the criterion layer of intelligence B1
表32功能性标准层下各评价指标权重值

Tab.3 Weighted value of each evaluation indicator under the criterion layer of functionality B2
表43安全性标准层下各评价指标权重值

Tab.4 Weighted value of each evaluation indicator under the criterion layer of security B3
表54美学性标准层下各评价指标权重值

Tab.5 Weighted value of each evaluation indicator under the criterion layer of aesthetics B4
根据一级指标权重值可知,消防机器人的重要等级顺序分别为3安全性、2功能性、1智能性和4美学性,即消防员把消防机器人的安全性和功能性放在首位,在此基础上希望增加智能性和美学性。根据二级指标的权重值可知,消防员对影响消防机器人3安全性的10机体防爆性、8机体耐火性评级较高。在2功能性中需求依次是7爬坡/越障/避障功能、6无线遥控功能和5水柱和水雾切换。在1智能性需求的先后顺序:2智能分析火源、4规划行走路径、1无人机巡查和3外部环境分析。在4美学性中,13造型重要性远大于11色彩和2材质。根据一致性指标和检测系数指标,值均小于0.1,表明所有的判断矩阵均通过了一致性检验。
3 智能履带式消防机器人设计实践
3.1 设计定位及效果图
根据消防机器人设计要素权重分析结果,运用产品设计流程与方法,应用人工智能技术,设计一款智能履带式消防机器人。该机器人由消防机器人主体和监测无人机组成,适用于高温、有毒等高危环境,监测无人机可生命体识别、判断火源和危险排查,消防机器人主体可进入狭窄空间完成灭火和救援功能,消防机器人设计效果如图3所示,监测无人机分离主体工作状态如图4所示。

图3 智能履带式消防机器人

图4 无人机分离主体工作状态
3.2 消防机器人内部结构设计
消防机器人主体和监测无人机的内部结构见图5,各结构名称及功能见表6。
3.3 消防机器人各项功能分析
1)灭火功能分析。消防机器人的灭火功能主要由消防水炮完成,消防水炮可实现水的雾化或水直流切换,仰视与俯视角度切换,满足5水柱和水雾切换功能。水炮采用铝合金硬质阳极氧化处理,耐腐蚀性更强,在面对坠物与爆炸时,因水炮与上盖连接,可有效的防止坠物损伤水炮。
2)运动功能分析。消防机器人的运动装置主要采用履带式移动方式,以三角形的设计保证整个机体的稳固性,在运动时避免了轮式移动的越障能力低,易造成挂钩及打滑等缺点。考虑到恶劣环境的应用,特采用宽大的履带设计,中间有旋转轴,可满足360°旋转操作,能自由行驶在凹凸不平的地面上,实现了7爬坡/越障/避障功能。
3)无人机功能分析。无人机作为消防机器人的救援辅助,可飞入高空或进入屋内进行生命探测与危险排查,熟悉火灾环境,并通过摄像头图像处理,实时传输于指挥处。三旋翼飞行桨置于折叠飞翼下,能够很好地保护机翼不受坠物伤害,红外探测仪与LED灯放置于透明灯罩内也可以很好地保护其在复杂的火灾情况中不受损伤,本功能实现1智能性中1无人机巡查功能。无人机同时具有火源智能识别系统,通过对现场火焰进行精准识别判断,分析出火焰闪烁频率,坐标变化率,面积增长等特点。通过第一时间的识别与判断,与地面的消防机器人进行信息同步切换,选取最佳的灭火装置,及时准确救援,同时通过无人机实现2智能分析火源和3外部环境分析功能,见图6。
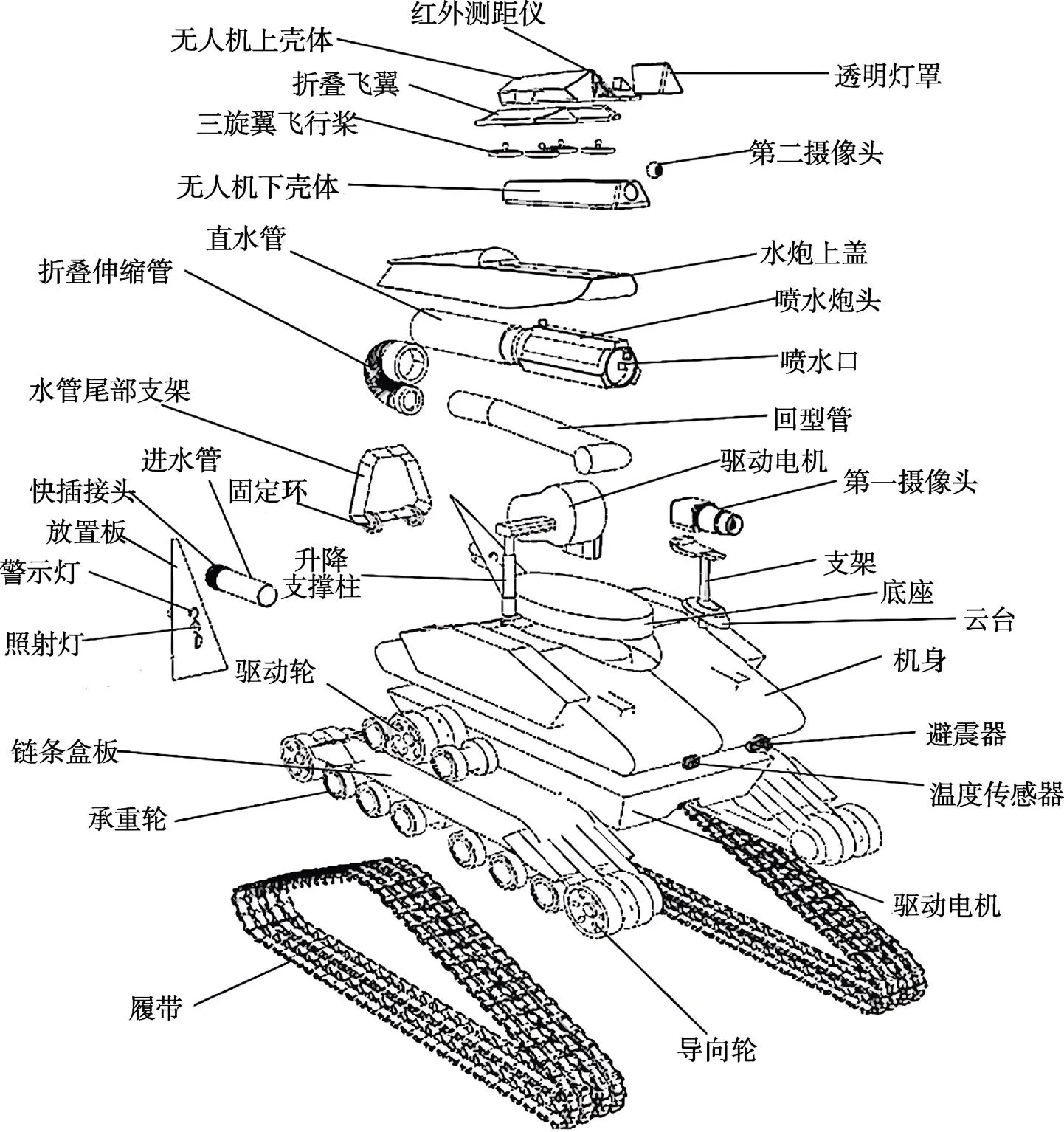
图5 消防机器人的结构设计
表6 智能消防机器人各结构名称及功能
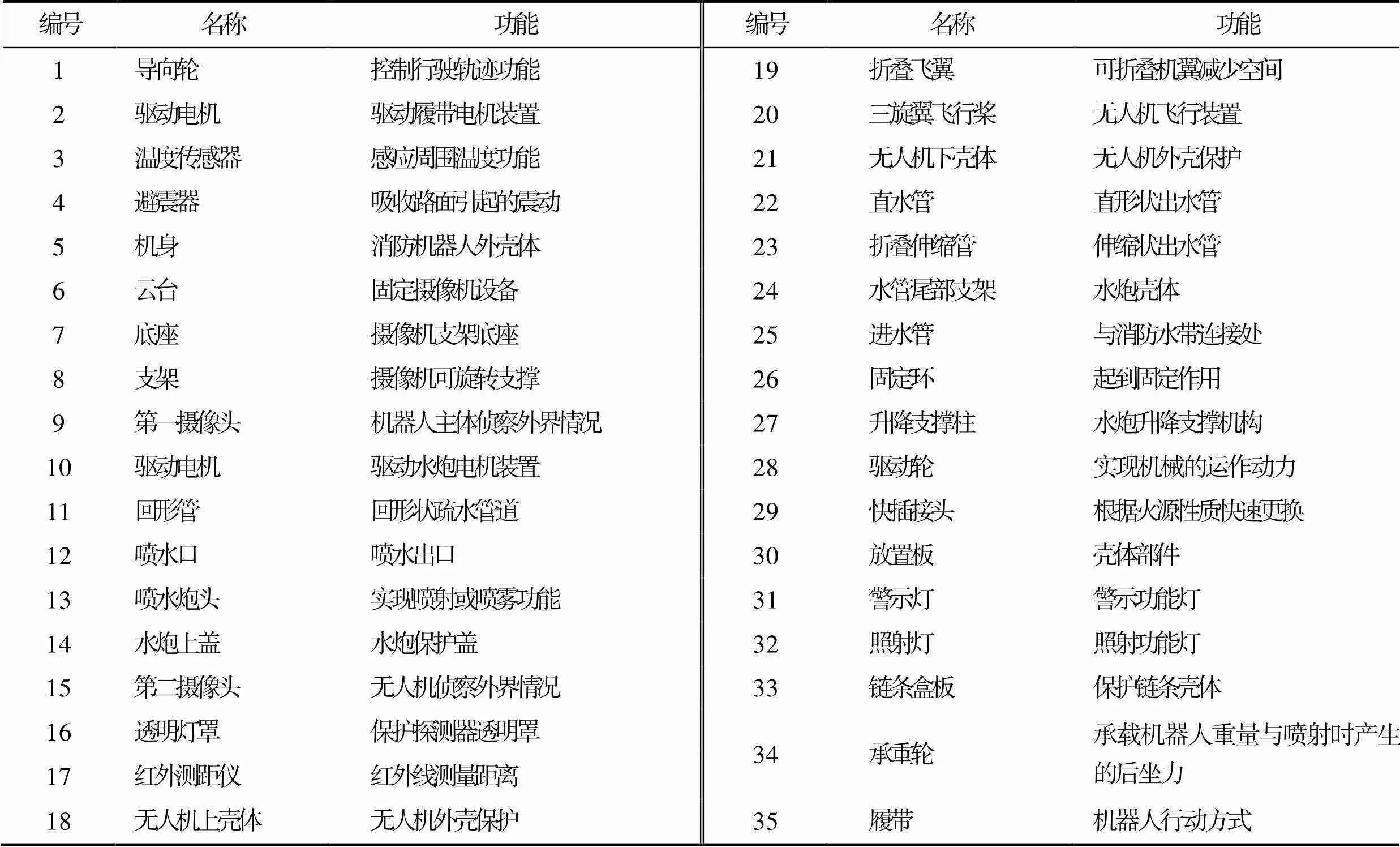
Tab.6 Structure name and functions of intelligent fire fighting robot
4)智能识别功能分析。消防机器人具有路线避障识别及火源定位系统,采用专属的无线射频辨识体系,实时观察周围情况,会采取避撞方案,如地面杂物过多,则会采取从杂物上方平坦通过的方案,以最快的效率到达指定灭火现场。配合无人机调整消防水炮的倾斜高度及转向,来确定火源位置与角度调试,可以极大地节省救援时间,满足3外部环境分析和4规划行走路径功能,见图7。
5)结构变换功能分析。由于火源性质不同,灭火采取的措施也要随之变换。消防机器人后方设有快插接头,在内部设有水柱与水雾的切换模式,当智能识别得到应采取的措施后,会迅速切换。上方的消防水炮则会随火源的楼层高度的需求进行延伸(通过升降支撑系统、折叠伸缩管及消防炮头转换器的运作来实现),提高灭火效率。无人机停息在消防机器人上方与整个机体融合,工作时两边飞行翼会自动张开,向上飞行;任务完成后,无人机会自动识别,再次飞回到机器人上方,飞翼会收到两臂内侧并折叠向下与外壳贴合,进入备战状态。
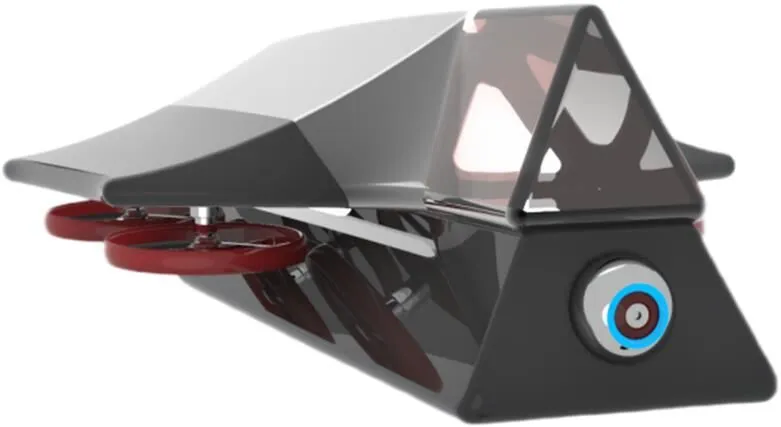
图6 监测无人机设计

图7 消防机器人水炮设计
3.4 操控装置UI界面设计
结合消防机器人专业手持控制器,设计操控平台的UI界面。消防员可通过界面实现对消防机器人和无人机的位置、操作、灭火模式等监测和远程操控,实时了解火灾场所内部情况。如发现伤亡人员,系统会识别人员身份信息,以便更快地进行精准救援。
为了体现科技感,UI界面在配色上选取红、黑、灰色进行搭配。界面上展示消防机器人所传送回来的实时火场信息,主要包括:实时图像、隐患排查、气体数值、生命值检测、火场数据、系统设置、工作日志、用户登录,根据信息种类,将界面划分为上下两部分,滑动可切换画面,重要的部分以文字加以说明,放大字体使界面清晰易懂,操控平台UI界面设计见图8。

4 人工智能技术在消防机器人中的设计应用
4.1 人工智能技术应用
从输出系统、输入系统、控制系统和通信系统等方面融入消防机器人设计,可增加自然灾害的评估、检测,在高危环境下取代人力作业,协助分析和高风险评估处置等功能[24-25],见图9。
1)输出系统应用。人工智能在界面显示时,对采集到的图像、音频、视频进行归纳分类,并可针对性地输出,如火势大小、生命体检测、内部火灾情况等,有利于准确采取救援措施,节约救援时间。
2)控制系统应用。人工智能可以高效地控制机器的运动、功能及交互系统。在消防机器人的运动控制上,能进行自动导航到达指定区域。通过电机驱动与行走传感技术可以跟踪定位火势的发展蔓延趋势。远程控制功能可对火场情况探测、水炮喷射角度控制、瞄准功能等进行远程操控。交互控制功能可在紧急的救援中采用语音和界面触屏结合的方式,大大地节省时间。
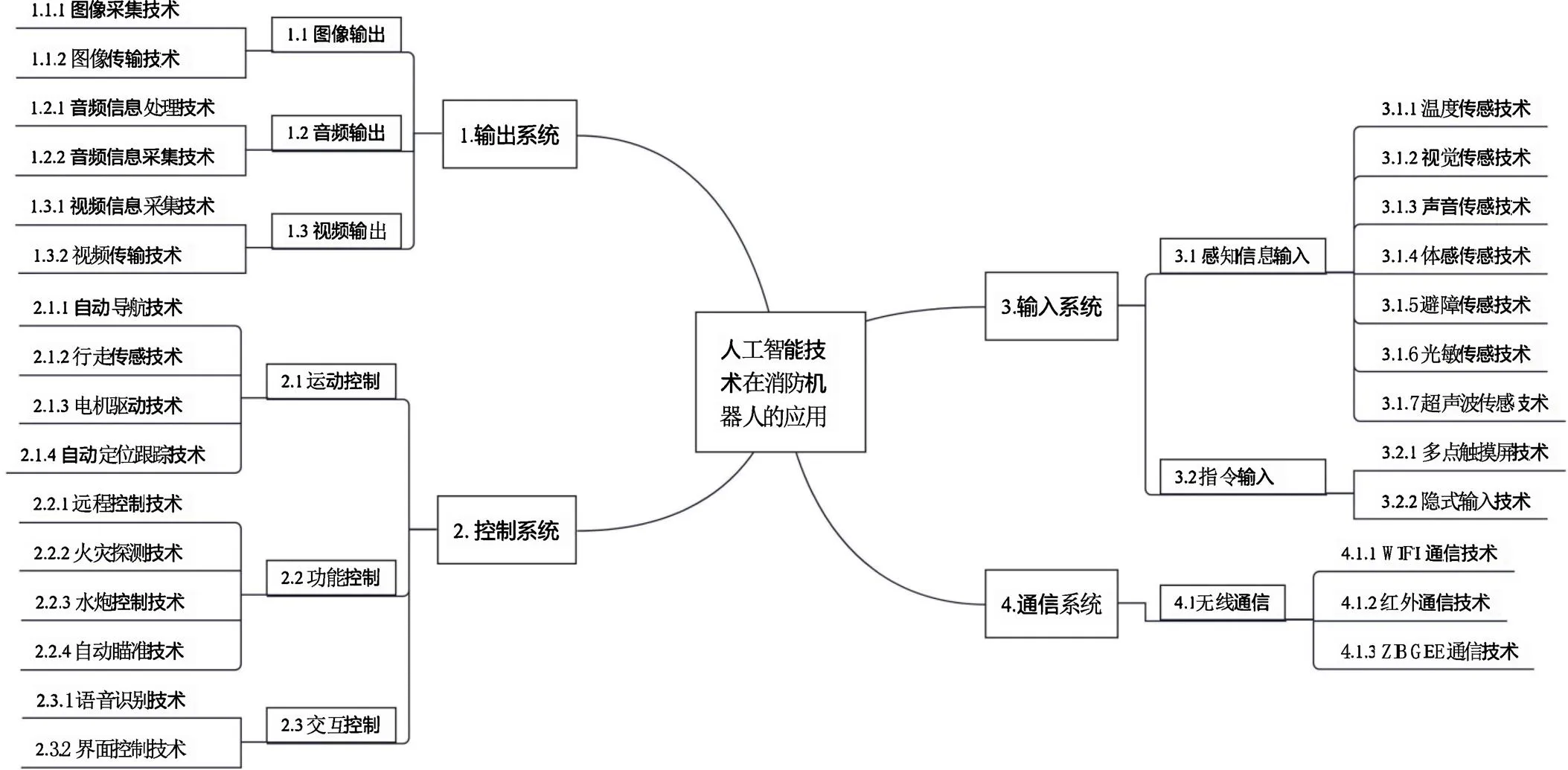
图9 人工智能技术在消防机器人的应用
3)输入系统应用。感知信息输入可通过传感系统对温度、视觉、声音、体感、避障、光敏、超声波等信息进行识别输入,保障消防机器人的运行安全与施救作业。同时,通过多点触摸屏技术、隐式输入技术实现指令输入功能。
4)通信系统应用。人工智能的优势是可通过无线通信的方式让消防机器人自动运作。多采用Wi-Fi、红外、ZIGBEE通信技术,实现消防机器人的智能操控。
4.2 消防机器人智能控制系统设计
运用人工智能技术,在消防机器人和无人机控制器内部安装有信号接发模块、定位模块、计时模块、数据分析模块、数据采集模块、警报模块等,同时无人机控制器还装有飞行扫描模块和障碍分析模块,见图10。
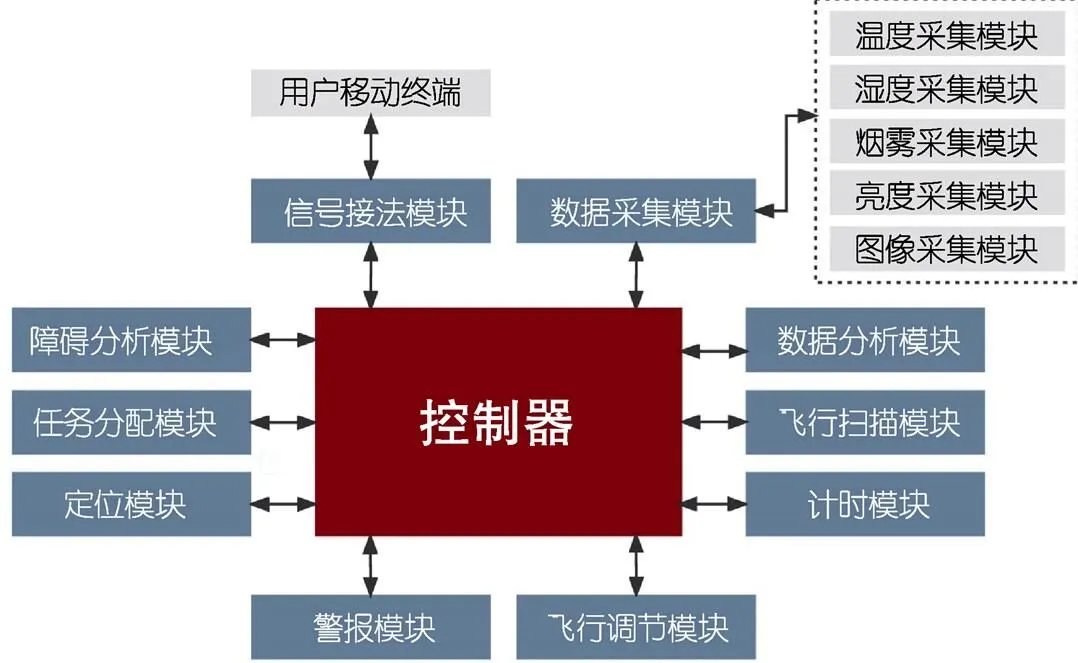
图10 智能消防机器人控制系统设计
1)信号接发模块用于消防机器人和无人机接收和发送信号。
2)定位模块用于定位消防机器人和无人机的位置信息。
3)计时模块用于对消防机器人和无人机的工作时间进行记录。
4)飞行扫描模块用于对无人机的飞行前方进行不间断扫描。
5)数据分析模块可对外部的环境信息进行分析。
6)数据采集模块用于采集外部的环境信息,并将环境信息发送至数据分析模块,环境信息包括外部温度值、外部湿度值、外部烟雾值、外部光亮值和外部图像。
7)警报模块用于对火灾信息进行警报。
8)障碍分析模块用于接收飞行扫描模块发送的障碍信息。
4.3 智能消防机器人数据模块分析步骤
通过消防机器人和无人机内部的数据分析模块,获取外部环境的温度值、湿度值、烟雾值和亮度值,同时分析火场的火焰颜色判断火源种类和大小,以此判断火场环境和采用何种灭火方式,数据分析模块步骤和计算方式如下。
步骤一:获取外部环境中的温度值d、湿度值d、烟雾值w和亮度值d。
步骤二:利用公式得到外部环境值j,具体见式(1)。
式中:1、2、3和4均为预设比例系数固定数。
步骤三:摄像头获取外部图像的长度和宽度,计算得到该外部图像的总像素点。
步骤四:遍历该外部图像得到火焰颜色的像素点,火焰颜色包括暗红色、红色、橙色、黄色、蓝白色和白色,计算得到火焰颜色的像素点占比z[5-6]。
步骤五:结合外部环境值j和火焰颜色的像素点占比z,利用公式计算得到外部环境的火灾预警值y,具体见式(2)。

步骤六:当火灾预警值y大于设定阈值时,生成火灾预警信号加载至警报模块中。
5 结语
借助KJ法筛选消防机器人需求指标,通过AHP层次分析法研究发现:消防员对机体防爆性、机体耐火性、爬坡/越障/避障功能评级较高,同时希望具有智能分析火源、规划行走路径、无人机巡查等智能功能。
根据消防机器人设计要素权重分析结果,采用监测无人机与消防机器人结合的方式,运用人工智能技术嵌入任务分配模块、警报模块、飞行调节模块、定位模块、计时模块、飞行扫描模块、数据分析模块、数据采集模块和信号接发模块,使路空两种模式相互配合。无人机具有巡查路径规划、智能分析、定点持续监控和火情报警等功能,消防机器人可进入狭小危险的火场,智能化确定火源种类,配合无人机调整消防水炮的倾斜高度及转向,可以大大地节省救援时间。
尽管目前消防机器人的研发和应用已经有了很大的进步,但依然面临着很多技术瓶颈。随着人工智能技术在消防机器人中的不断应用,将来消防机器人可完全替代消防员在火灾危险的区域完成灭火和救援任务。
[1] 陈庆暖. 消防灭火机器人及其应用[J]. 消防科学与技术, 2018, 37(5): 644-646. CHEN Qing-nuan. Fire Fighting Robot and Its Application[J]. Fire Science and Technology, 2018, 37(5): 644-646.
[2] 周卫华, 张德发. 四轮移动机器人平台的设计与实现[J]. 电气自动化, 2018, 40(5): 10-12. ZHOU Wei-hua, ZHANG De-fa. Design of Omni- Directional Mobile Robot with Alternate Wheel[J]. Electrical Automation, 2018, 40(5): 10-12.
[3] ZHOU Yan, WILKINS D, COOK R P. Neural Network Control for a Fire-Fighting Robot[J]. Software - Concepts & Tools, 1998, 19(3): 146-152.
[4] DEARIE S, FISHER K, RAJALA B, et al. Design and Construction of a Fully Autonomous Fire Fighting Robot[C]//Proceedings: Electrical Insulation Conference and Electrical Manufacturing and Coil Winding Conference (Cat. No.01CH37264). Cincinnati, OH, USA. IEEE, 2002: 303-310.
[5] ALTAF K, AKBAR A, IJAZ B. Design and Construction of an Autonomous Fire Fighting Robot[C]//2007 International Conference on Information and Emerging Technologies. Karachi, Pakistan. IEEE, 2007: 1-5.
[6] 李彬, 陈帝伊, 马孝义. 智能灭火机器人系统的设计与实现[J]. 机械与电子, 2010, 28(1): 57-61.LI Bin, CHEN Di-yi, MA Xiao-yi. Design and Implementation of Intelligent Fire Fighting Robot System[J]. Machinery & Electronics, 2010, 28(1): 57-61.
[7] PARMAR D. Design and Implementation of an Autonomous Fire Fighting Robot[D]. Guelph, Ontario, Canada: University of Guelph, 2011.
[8] YE Zi-liu, SU Fu-wen, ZHANG Qing-yong, et al. Intelligent Fire-Fighting Robot Based on STM32[C]//2019 Chinese Automation Congress (CAC). Hangzhou, China. IEEE, 2020: 3369-3373.
[9] GAO Zheng-zhong, WANG Xiao-hui, LI Zhi-wen. Design of Intelligent Line-Trackingrobot Based on STM32[J]. Journal of Measurement Science and Instrumentation, 2014, 5(2): 55-58.
[10] RAKIB T, RASHID SARKAR M A. Design and Fabrication of an Autonomous Fire Fighting Robot with Multisensor Fire Detection Using PID Controller[C]//2016 5th International Conference on Informatics, Electronics and Vision (ICIEV). Dhaka, Bangladesh. IEEE, 2016: 909-914.
[11] RAJU J, MOHAMMED S S, PAUL J V, et al. Development and Implementation of Arduino Microcontroller Based Dual Mode Fire Extinguishing Robot[C]//2017 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS). Srivilliputtur, India. IEEE, 2018: 1-4.
[12] LIU Yong-tao, SUN Rui-zhi, ZHANG Xiang-nan, et al. An Autonomous Positioning Method for Fire Robots with Multi-Source Sensors[J]. Wireless Networks, 2021: 1-13.
[13] 席文姣, 陈帝伊, 马孝义. 基于ARM9嵌入式系统智能灭火机器人控制器设计[J]. 现代电子技术, 2010, 33(10): 114-117. XI Wen-jiao, CHEN Di-yi, MA Xiao-yi. Design of Controller for Smart Fire-Fighting Robot Based on ARM Embedded System[J]. Modern Electronics Technique, 2010, 33(10): 114-117.
[14] 朱彦亮. 基于ARM9的灭火机器人的设计与实现[D]. 镇江: 江苏科技大学, 2014. ZHU Yan-liang. The Design and Implementation of ARM9-based Fire-fighting Robot[D]. Zhenjiang: Jiangsu University of Science and Technology, 2014.
[15] 程丽娜, 陈杨阳. 基于C51单片机的智能灭火机器人的设计与研究[J]. 机器人技术与应用, 2012(3): 38-41. CHENG Li-na, CHEN Yang-yang. Design and Research of Intelligent Fire-Fighting Robot Based on C51[J]. Robot Technique and Application, 2012(3): 38-41.
[16] 肖明俊, 祝玲, 张生文. 基于51单片机家居智能灭火机器人灭火系统的设计[J]. 硅谷, 2013, 6(9): 14, 12. XIAO Ming-jun, ZHU Ling, ZHANG Sheng-wen. Design of Fire Fighting System for Home Intelligent Fire Fighting Robot Based on 51 Single Chip Microcomputer[J]. Silicon Valley, 2013, 6(9): 14, 12.
[17] 张飞飞, 杨雪松, 高爱宇. 基于STM32的智能灭火机器人设计[J]. 甘肃科技, 2013, 29(12): 13-15. ZHANG Fei-fei, YANG Xue-song, GAO Ai-yu. Design of Intelligent Fire Fighting Robot Based on STM32[J]. Gansu Science and Technology, 2013, 29(12): 13-15.
[18] 杨斌, 刘思美. 基于STM32的智能灭火机器人设计方案[J]. 山东工业技术, 2016(10): 143.YANG Bin, LIU Si-mei. Design Scheme of Intelligent Fire-Fighting Robot Based on STM32[J]. Shandong Industrial Technology, 2016(10): 143.
[19] 姚蕴珍. 基于STM32的灭火机器人设计[J]. 中国新通信, 2017, 19(17): 43-44. WEN Yun-zhen. Design of Fire Extinguishing Robot Based on STM32 [J]. China New Telecommunications, 2017, 19(17): 43-44.
[20] NADERZADEH M, ARABALIBEIK H, MONAZZAM M R, et al. Comparative Analysis of AHP-TOPSIS and Fuzzy AHP Models in Selecting Appropriate Nanocomposites for Environmental Noise Barrier Applications[J]. Fluctuation and Noise Letters, 2017, 16(4): 1750038.
[21] 川喜田二郎. KJ法[M]. 中央公论社, 1996.Kawakita Jiro. KJ method [M]. Central commune, 1996 Kawakita Jiro. KJ Method[M]. CHUKO, 1996.Kawakita Jiro. KJ method [M]. Central commune, 1996
[22] 孙效华, 张义文, 侯璐, 等. 人工智能产品与服务体系研究综述[J]. 包装工程, 2020, 41(10): 49-61.SUN Xiao-hua, ZHANG Yi-wen, HOU Lu, et al. Review on Artificial Intelligence Products and Service System[J]. Packaging Engineering, 2020, 41(10): 49-61.
[23] 侯建军, 毛轶超, 许莉钧. 人工智能背景下设计师能力需求及胜任力模型再建构[J]. 包装工程, 2021, 42(24): 340-348. HOU Jian-jun, MAO Yi-chao, XU Li-jun. Requirements Ability of Designers and Reconstruct the Designers Competency Model under the Background of Artificial Intelligence[J]. Packaging Engineering, 2021, 42(24): 340- 348.
[24] 李远, 农秉茂. 包装搬运机器人运动轨迹优化设计[J]. 包装工程, 2020, 41(1): 123-127. LI Yuan, NONG Bing-mao. Optimization Design of Moving Trajectory for Packaging Handling Robot[J]. Packaging Engineering, 2020, 41(1): 123-127.
[25] 孙玥, 魏欣. 基于ARM的嵌入式包装搬运机器人控制系统设计[J]. 包装工程, 2017, 38(23): 172-176. SUN Yue, WEI Xin. Design of Control System for Embedded Packaging and Handling Robot Based on ARM[J]. Packaging Engineering, 2017, 38(23): 172-176.
Research and Design of Intelligence Crawler Fire Fighting Robot Based on Analytic Hierarchy Process
HOU Jian-jun, MAO Yi-chao, CHEN Li, CHEN Wen-min
(College of Art and Design, Nanjing Institute of Technology, Nanjing 211167, China)
The work aims to design an intelligent crawler fire fighting robot with unmanned air vehicle (UAV) monitoring functions in virtue of artificial intelligence (AI) technology and fire fighting robot function in order to define the functional demand indicators of the fire fighting robot. Functional demand indicators of the robot above were defined by literature research and market product analysis in virtue of KJ affinity graph. The weighted values of all functional indicators were calculated by questionnaires, interviews and analytic hierarchy process (AHP), and consistency test was completed as well. Then the design practice of the robot was completed from such processes as design positioning, sketch design, structural analysis, functional analysis, application of AI technology, design of intelligent control system, steps of data module analysis and design of interface UI, etc. via the design practice method. 1 target layer, 4 first-level indicators and 13 second-level indicators of demand indicators of the robot are obtained. To be specific, the priority ranking of first-level indicators is safety, functionality, intelligence and aesthetics. Firefighters give high ratings on the explosion resistance, fire resistance and functions of climbing, obstacle crossing and avoidance of the robot. They also show expectations on intelligent functions of the robot, such as intelligent analysis of fire sources, planning of walking paths, and UAV patrol check, etc. At last, an intelligent fire fighting robot with UAV monitoring function is designed by combining the research conclusions and design practice. In virtue of the land and air modes, the UAV is capable of patrol check, path planning, intelligent analysis, fixed point monitoring, fire alarm, etc. as well as fire extinguishing and rescue.
fire fighting robot; analytic hierarchy process (AHP); monitoring UAV; artificial intelligence technology
TB472
A
1001-3563(2023)10-0172-09
10.19554/j.cnki.1001-3563.2023.10.017
2022–12–05
2023年江苏高校“青蓝工程”中青年学术带头人项目;2022教育部人文社会科学青年基金项目(22YJC760024);江苏高校哲学社会科学研究重大项目(2022SJZD115);南京工程学院高等教育研究课题重点课题(2023GJZD03);南京工程学院研究生教育教学改革一般课题(2023YJYJG08);南京工程学院研究生教材建设(2022JC09)
侯建军(1983—),女,博士,教授,主要研究方向为工业设计、产品设计、人工智能。
责任编辑:陈作