四旋翼无人机移动平台跟随降落系统设计
2023-05-26董亮亮徐金欣
康 雪 ,马 瑞 ,曹 杰 ,董亮亮 ,徐金欣
(江苏理工学院机械工程学院,江苏 常州 213001)
0 引言
无人驾驶飞机(UAV)是利用无线电遥控设备和自备的程序控制装置操控的不载人飞机,分为军用和民用两种。现在,无人机技术已然成熟,被大量运用于生活中,在消防救灾应急通信、植物保护、电力巡检、快递运输、警用巡逻等方面均有广泛应用[1-6]。军用无人机[7]规格较大,续航时间在60 h以上,对于目前的无人机来说,这样长的续航时间已足够用于大型的抗灾、战争等方面。而对于民用无人机,因为规模较小,所以普遍续航时间为10 min~20 min,远远不能满足人们日常生活的需求。续航时间是由无人机电机轴数、电机转速、负重、电池电压、信号等决定的,其中最重要的是,每次无人机飞行前都需要把电池充满,同时需要在电量见底之前自主降落至指定平台,否则无人机会因为电量不足导致坠落损毁。现在多数的无人机精准降落[8]主要是以视觉定位技术主导。李海琳等[9]提出一种搭载电池快换装置的无人机续航移动基站,这一搭载电池快换装置的无人机续航移动基站的定位系统具备机器视觉和卫星-惯性导航组合定位系统双重定位模块。陈国栋[10]提出UAV/UGV异构系统中的四旋翼自主起降方法。陈至坤等[11]利用机器视觉系统定点识别的方法自主精准降落。于翔[12]验证了以无人机为中继进行UWB定位的可行性。
基于上述无人机的研究,续航时间问题影响了各项工作的开展。对此,本文设计了一种跟随降落系统,考虑到救援等任务在室外进行,本文将在GPS定位的基础上利用新型UWB定位与视觉识别标签的方法,跟随移动平台,实现准确跟随降落。
1 四旋翼降落系统设计
1.1 总体设计
四旋翼无人机跟随移动平台由四旋翼飞行器与无人驾驶小车构成,包含了GPS、UWB、OpenMV等传感器的定位技术。无人机以自身坐标系和地面坐标系控制方向,以世界坐标系{A}为飞行姿态的参考坐标系。其中,无人车作为无人机的降落平台,它的运动相对于世界坐标系{A},复杂的全向运动可分为平移与转动。构建无人机—无人车总体设计示意图,设四旋翼坐标系为{B},无人车的坐标系为{C},两者坐标系关系及OpenMV、4个基站T1、T2、T3、T4与标签T0的位置,如图1所示。

图1 无人机—无人车总体设计示意图
1.2 UWB定位系统设计
UWB定位中,飞行时间根据双向测距飞行时间法计算[10]:
基站与标签之间的信号将作为球体散播,利用球面定位目标标签位置,节点T0与参考节点T1、T2、T3、T4之间的距离RANGTi(T0)决定以Dij=RANGTI(T0)为半径、T0为中心的球,位置(Xi,Yi,Zi)=POS(Ti)由中心位于 (T1,···,Tk),半径为 (Di1,···,Dik)的k个球的交点决定。设4个位置已知的节点坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4),目标标签的坐标p为(x,y,z)。则有以下关系成立:
求解式(2)方程组可算出目标节点的坐标参数,但由于会产生系统与随机误差,造成位置不精准。因此,本文先计算飞行时间差TDOA,再利用三维几何关系、Taylor级数算法确定未知节点(T0)的位置坐标。
三维Taylor级数算法从假设初值(x(0),y(0),z(0))开始计算,设未知节点坐标(x,y,z),其他锚节点的位置为上述4个已知节点坐标。则未知节点到第i个锚节点的位置Di为[13]:
式中,c代表光速。
未知节点位置坐标误差(Δx,Δy,Δz)为:
式中,Q是到达时间差TDOA的协方差矩阵。
令x=x(0)、y=y(0)、z=z(0)代入矩阵(5)中,算出D1、D2、D3、D4的值,用x(0)+Δx代替x的值,y(0)+Δy代替y,z(0)+Δz代替z,直到步骤循环到Δx、∆y、∆z足够小,即求得目标标签(x,y,z)。
1.3 机器视觉处理
为确保识别到完整的标签内容,精简实验,达到识别降落的效果,本文采用OpenMV识别H字符的形式进行识别降落。与AprilTag二维码识别功能类似,H字符识别通过Sensor模块拍摄,如图2所示。

图2 OpenMV识别H字符降落
识别成功后发送至无人机处理端,为确定无人机与无人车之间的位置关系,以无人机上的OpenMV为传感器计算两者坐标差。当相机光心投影于图像坐标系时,相机的位置在图像上以像素点形式存在。利用OpenMV识别生成的矩形框,可得到中心点像素坐标p(u1,v1),此时坐标为相机于图像上的坐标。设无人车上H字符的图像坐标为q(u2,v2),未识别到H字符时,无人机通过UWB定位,识别到字符时改用OpenMV识别,此时利用p(u1,v1)-q(u2,v2)计算得到相机与字符的坐标差,即可获得无人机与无人车的坐标差。
1.4 数据融合处理
为使无人机定位更精准,本系统采用基于经典卡尔曼滤波的多传感器信息融合处理。离散时间线性卡尔曼滤波模型主要根据系统上时刻的状态估计值与当前时刻的状态测量值估计当前状态,由此得到更为准确的位置估计值。因此,可用最小方差无偏原则估计得到当前的状态估计值,卡尔曼滤波的计算方程组为:
式中,XK|K∈Rn为K时刻的状态向量;XK|K-1∈Rn为K时刻的观测向量;UK-1∈Rn为K-1时刻的控制向量;ΦK-1∈Rn×n为K-1时刻到K时刻的系统转移矩阵,ΦK-1是K-1时刻不变的常数矩阵;HK-1∈Rm×n为K-1时刻的观测矩阵。
卡尔曼数据融合处理步骤如图3所示。
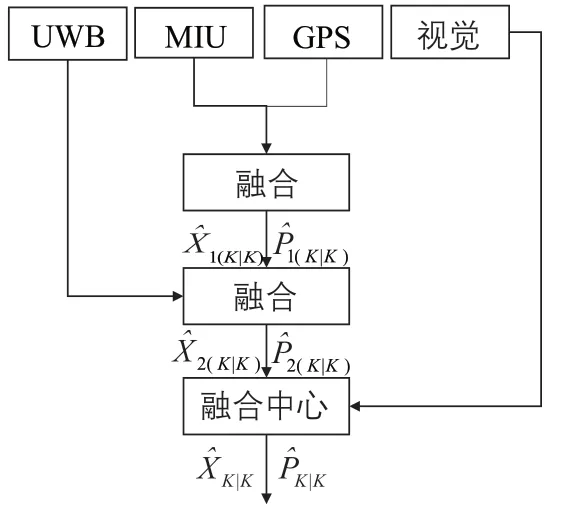
图3 卡尔曼滤波融合处理步骤
2 实验结果与分析
测量无人车与无人机两者尺寸,无人车长100 cm、宽55 cm、高28 cm,降落平台面积为5 500 cm2,无人机长28.7 cm、宽28.3 cm、高10.5 cm。对飞行数据进行卡尔曼滤波计算前,先将数据分组处理,无人机在三维中轨迹运动分为x轴、y轴、z轴,分别得到三轴数据后对其进行卡尔曼滤波,滤波结果如图4所示。
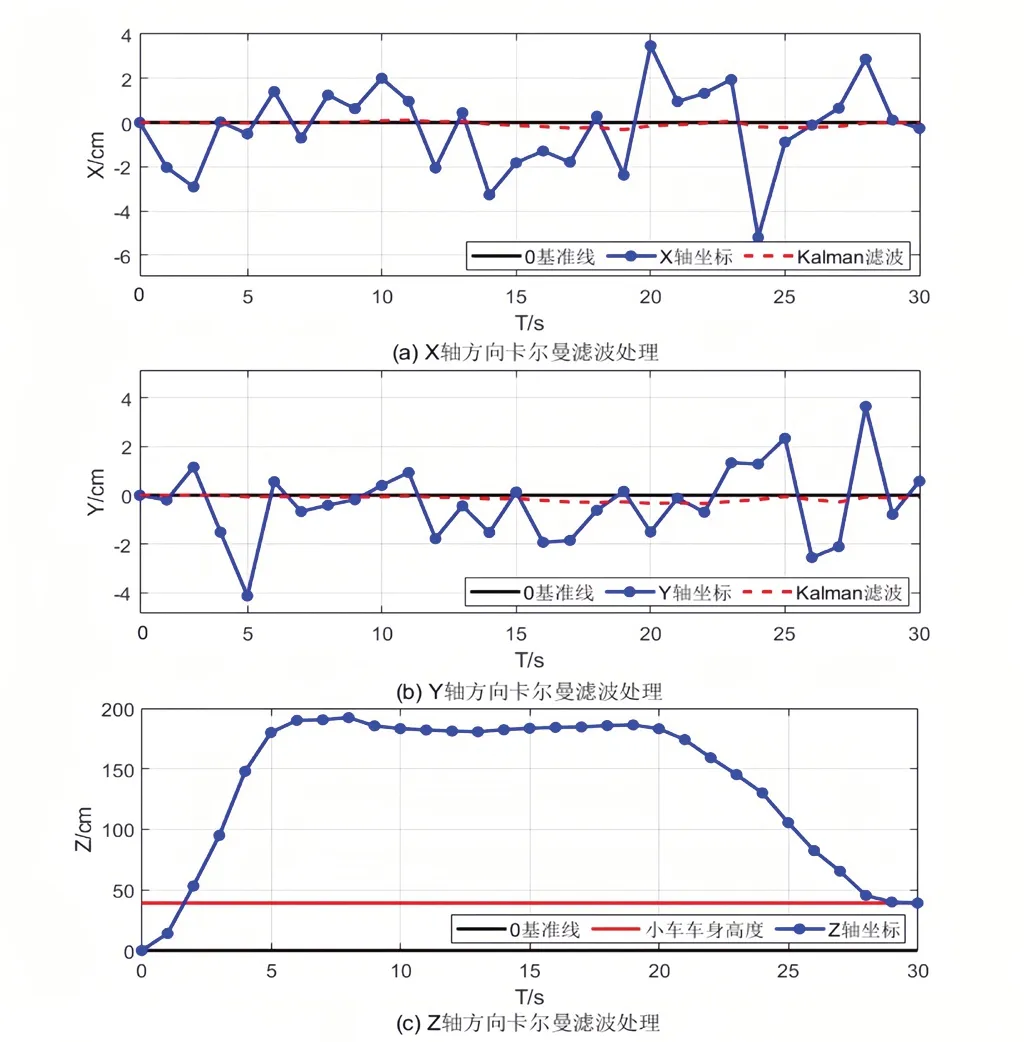
图4 分成三轴方向对数据卡尔曼滤波处理结果
对三轴分别卡尔曼滤波处理,对比处理前后的飞行轨迹,经过卡尔曼滤波处理后的无人机飞行与预期位置的偏移更少,系统卡尔曼滤波前后误差对比如图5所示。
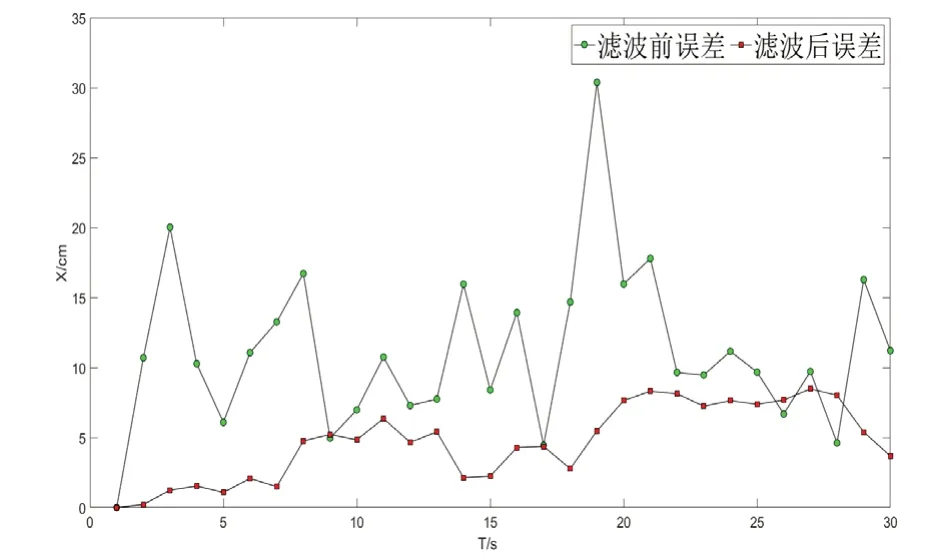
图5 系统卡尔曼滤波前后误差对比
在分别对无人机卡尔曼滤波后,无人机的偏移误差降低。配合移动平台,卡尔曼滤波前的飞行轨迹与卡尔曼滤波后的飞行轨迹对比如图6所示。

图6 无人机—无人车系统的卡尔曼滤波处理前后轨迹对比
可见,卡尔曼滤波后的飞行轨迹与小车轨迹接近,实现了无人机跟随移动平台,提高了跟随移动平台飞行的精确度,减少了无人机在飞行过程中因误差与自然因素导致飞行出现偏移的状况,为后续无人机降落于无人车上提供了更高的精准度,使其安全性更高。
将无人车放置于地面上,启动程序,让无人车在固定范围内自主移动,接着释放无人机,两者距离相差较远时,无人机根据GPS快速导引,定位无人机的大致位置,中段切换UWB导引,对无人车采用球面定位,近距离时利用OpenMV识别H标签算法定位,如图7所示。
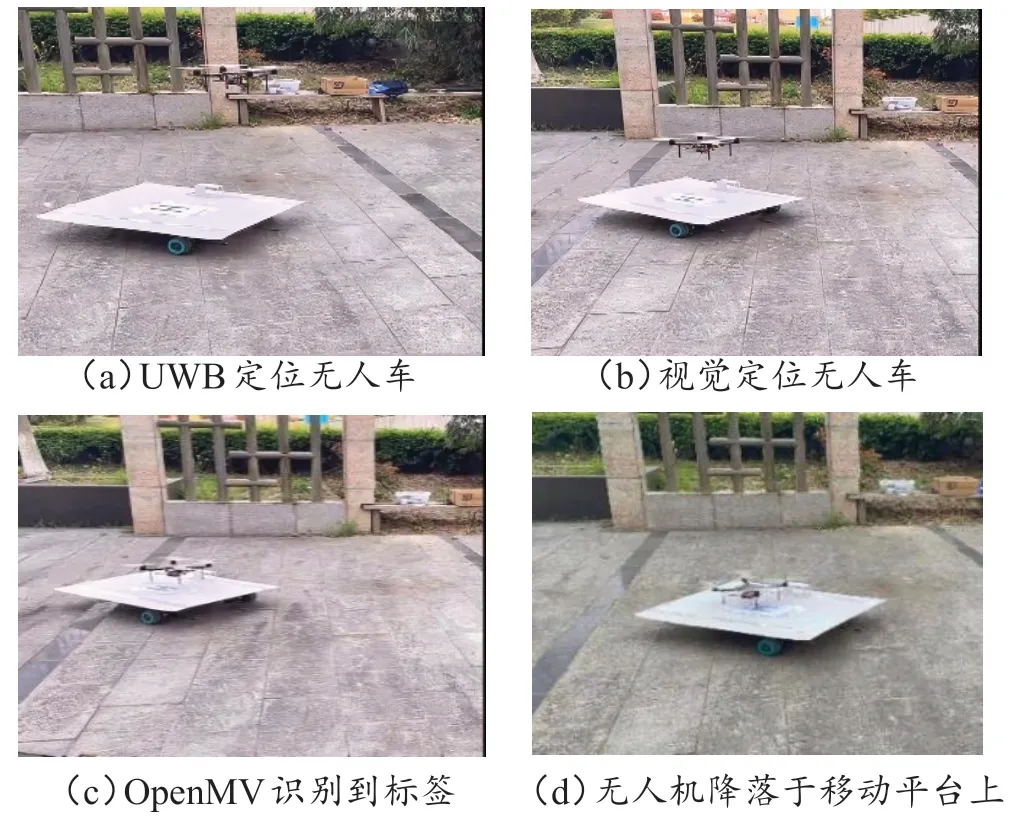
图7 多段制导示意图
3 结语
四旋翼无人机相对于其他型号无人机,姿态与飞行模式转换的可操控性更强。本文介于航空母舰的应用场景下,通过多段定位制导结合,建设无人机能自主跟随移动小车的平台。与传统定位系统GPS相比,本文增加了UWB定位与OpenMV导航降落,通过串口通信,将不同阶段的位置信息传给飞控,利用卡尔曼滤波分阶段融合数据,达到多段制导的目的,实现更高精度的降落。