免耕播种机播深智能监控系统的设计
2023-05-26于守先侯天宝李德新
于守先,侯天宝,李德新
(东丰县大阳镇综合服务中心,吉林 东丰 136306)
0 引言
免耕播种技术是保护性耕作技术的主要组成部分,主要是指在地表存在大量秸秆残茬的基础上进行作物播种作业[1-3],但是由于地表平整度较差,免耕播种机工作稳定性和播深质量都受到较大影响。播深一致性是播种质量的重要评价指标与技术参数,播深一致性直接影响作物的生长及产量的提升[4]。
在播种过程中,依靠人工进行播种作业质量监测存在劳动强度高、工作效率低等问题,在播种过程中容易发生机器堵塞造成大面积重播、漏播等现象[5]。随着农业机械自动化和智能化的发展,利用传感器、单片机等智能控制系统实现对农业机械的智能监测与调控是目前的主要发展趋势与研究重点。因此,基于智能监测装置实现对免耕播种机播种质量的监测是提高免耕播种机工作效率的重要环节,直接影响保护性耕作技术的大面积推广与应用。
1 国内外研究进展
1.1 国外研究进展
国外对免耕播种机研究起步较早,在20世纪40年代开始大量理论研究与试验分析,后期随着电子信息技术在农业生产中的快速发展,已经研制出较多相对成熟的智能监控系统。如美国生产出一款精密播种机电子监控系统,传感器类型较多,可以实现多个部件工作信息的监测与采集,但是结构较为复杂,传感器容易受到田间高温和灰尘的影响。后期,布卢农业大学基于视觉识别技术,研制出一种精密播种机作业制导系统,实现对播种的实时监测,可以极大地提高播种机工作质量与工作效率。
1.2 国内发展现状
在免耕播种机监控系统研究中,尽管我国研究起步较晚,但是随着电子信息技术的快速发展,我国不同生产企业和科研高校将信息技术与播种机结合,对免耕播种机监控系统进行了深入研究,也取得了较大的研究进展,并且设计了多种结构,如平行四连杆仿形机构、安装限深轮等方法实现结构优化,并且通过液压调节装置控制播种深度,基于多种传感器实现对播种深度的调节与控制。
2 免耕播种机播深实时监控系统整体设计
2.1 系统组成及功能
本研究选择免耕播种机型号为2BMZF-2,适合在秸秆覆盖的地表上进行播种作业,配合22~37 kW牵引机车,主要由机架、牵引梁等作业机构组成,可以一次性完成施肥、播种、覆土和镇压等作业环节。主要技术参数如表1所示[6]。
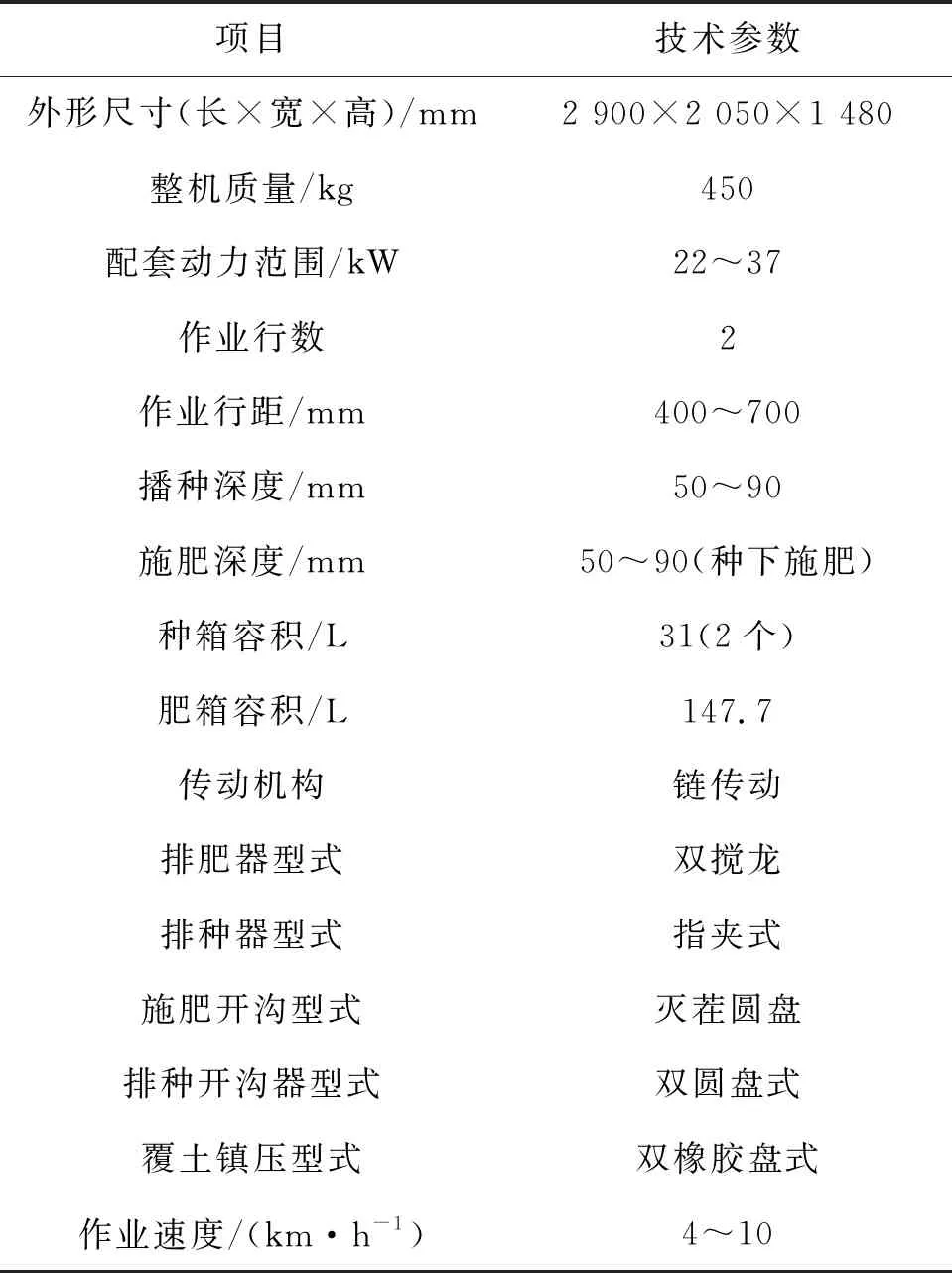
表1 2BMZF-2免耕播种机技术参数
免耕播种机实时监控系统主要包括播深信息采集模块、通信模块、报警模块和显示模块等。各部分功能如下:
1)显示模块。用于操作人员进行参数设置和免耕播种机各个系统实时信息的显示。
2)播种深度信息采集。主要是在免耕播种机工作过程中对播种深度数据经过滤波电路和数据转换模块进行分析和处理。
3)报警模块。本研究采用声光报警模块检测免耕播种机工作过程中实际播种深度与设定播种深度的差异性,超过设定阈值后发出警报。
4)通信模块。通信模块连接APP,将监测信息传输至移动客户端。
5)电源模块。采用车载12 V蓄电池电源经过降压转换后供电。
2.2 播深信息采集模块
播种深度信息监测采用单片机进行数据采集,经过微处理器将数据通过通信模块传输至移动终端。
2.3 无线通信模块
无线通信模块主要是实现数据传输,其工作性能直接影响免耕播种机监控系统数据监测稳定性和准确性。其主要功能是将单片机采集的田间信息快速、高效地传输给上位机。为了保证数据信息在田间高温、灰尘等恶劣环境中传输稳定性,应该保证通信模块工作低功耗。因此,本研究选取ESP8266WiFi模块作为免耕播种机监控系统的通信模块。
2.4 报警单元
本研究选择声光报警器作为报警模块,采用PNP三极管组成电流放电器,进而驱动报警蜂鸣器和LED灯。
2.5 GPS定位模块
免耕播种机田间工作采用GPS定位器实时获取免耕播种机工作位置,在系统中采用ATGM336H,可以为用户提供厘米级别的控制精度。
2.6 电源模块设计
免耕播种机监控系统采用12 V直流电压,但是系统工作只需要5 V电压,因此采用电源转换芯片对电流进行降压。
3 播深实时监控系统软件设计
系统采用C语言和汇编语言进行编程,程序编译工具为KEIL C51软件。C语言具有丰富的库函数,具有多种高级语言特点,存在可读性和移植性强等应用优势,被广泛用于各种系统开发。型号为STC89C516RD单片机作为主控单元,程序编写完成后将C语言代码写入单片机内部。
4 田间试验与分析
4.1 播种深度测定方法
作物播种深度采用《免耕播种机质量评价技术规范》,当田间播种深度≥3 cm时,播种深度误差为±1 cm,田间播种深度<3 cm时,播种深度误差为±0.5 cm。评价标准如表2所示。

表2 免耕播种机播种深度评价标准 单位:%
播种深度评价参数计算公式如式(1)(2)(3)和(4)所示
(1)
(2)
(3)
(4)
式中η—播种深度合格率,%;
n—播种深度合格数;
N—播种深度测量点数;

hi—播种深度测量值,mm;
Sh—播种深度标准差,mm;
Vh—播种深度变异系数,%。
4.2 结果与分析
在田间试验中,设定不同作业速度,分别为4,6,8和10 km·h-1,设定作物播种深度为35 mm,选取25个采集点作为试验数据,同时记录人工测量播深数据,进行对比与分析,数据分析结果如表3所示。结果表明,免耕播种机田间监控系统数值差异性较小,测定较为稳定,系统监控和人工测量之间的误差大部分在5%以内,表明该系统可以实现播种深度的有效测量。
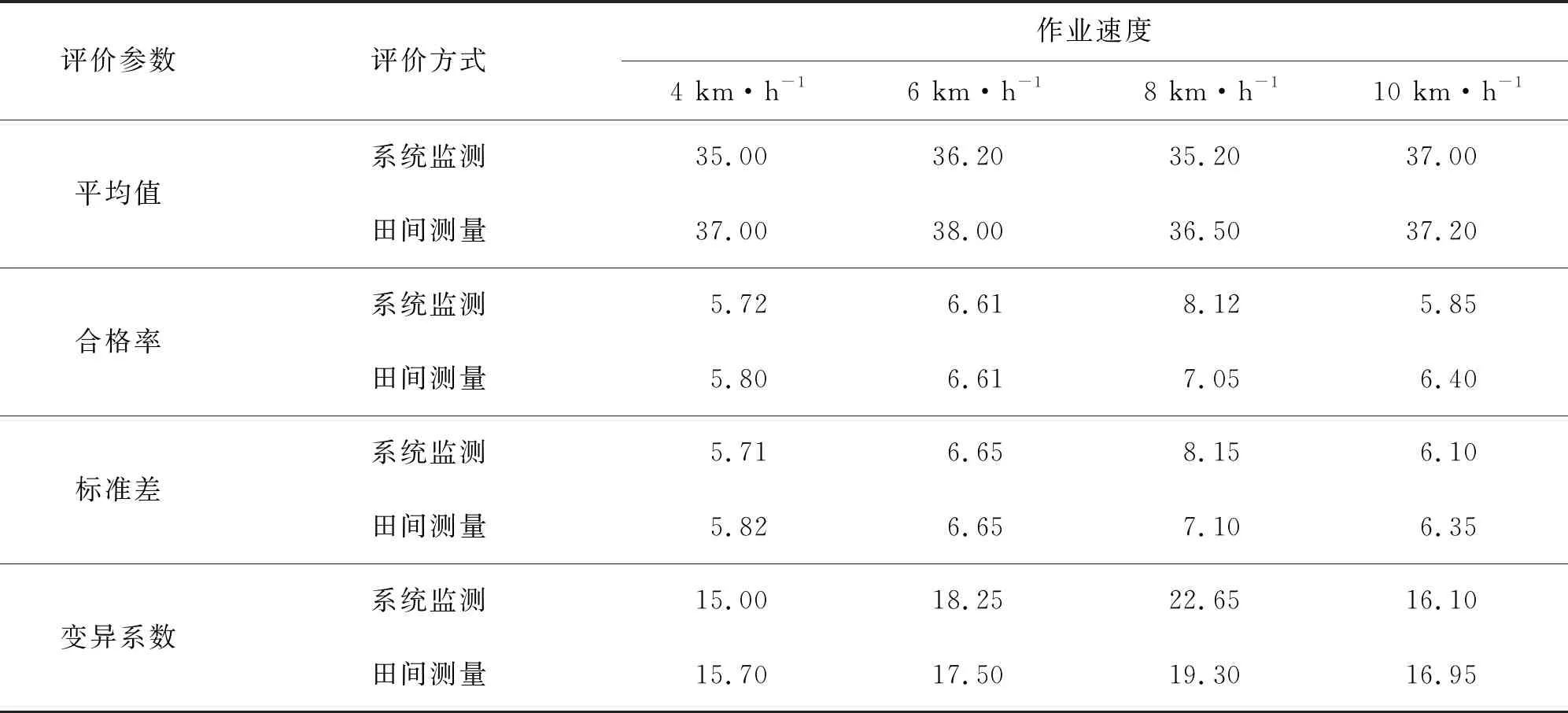
表3 统计数据分析 单位:mm
5 结论与展望
5.1 结论
针对免耕播种机播种过程中存在的播深质量低、播深一致性差等问题,本研究基于智能控制技术提出一种免耕播种机智能监控系统,实现对播种深度的监测,通过田间试验验证可知,系统监测播种深度与人工监测误差较小,可以实现对免耕播种机播种深度的实时监控。
5.2 展望
未来应增强免耕播种机智能监控系统APP监测信息多样化发展,并且基于视觉注意机制等实现对人机交互界面的优化设计,保证系统向人性化和智能化方向发展;另一方面,在机械设计中,应该使用液压装置实现对播种深度和开沟器的精准调节,促进免耕播种机向精密免耕播种机方向发展。
