基于VeriStand的纯电动整车控制器HIL测试平台设计
2023-05-24李之乾曹红艳许成林肖华东韩淑芳
李之乾 曹红艳 许成林 肖华东 韩淑芳


【摘 要】随着新能源汽车的快速发展,如何有效实现降本增效成为了各大新能源厂商所面临的一大难题。在汽车的开发阶段,测试验证汽车的功能和性能往往占据了很大一部分研发成本。本文基于VeriStand开发环境,搭建一套纯电动物流车整车控制器硬件在环仿真测试平台,经验证使用,能够在实车测试之前,有效测试整车控制器的主要控制逻辑,发现控制软件中的Bug。在测试阶段中节省开发成本,提高研发效率,并降低后续实车试验的危险性,有效保证测试人员的人身安全。
【关键词】纯电动物流车;硬件在环;整车控制器;VeriStand
中图分类号:U469.72 文献标志码:A 文章编号:1003-8639( 2023 )05-0013-03
【Abstract】With the rapid development of new energy vehicles,how to effectively achieve cost reduction and efficiency has become major new energy manufacturers are facing a major problem. In the development stage of a car,testing to verify the function and performance of the car often accounts for a large part of the development cost. Based on VeriStand development environment,this paper built a set of pure electric logistics vehicle controller hardware-in-the-loop simulation test platform. The verified use can effectively test the main control logic of the vehicle controller and find the bugs in the control software before the actual vehicle test. In the test stage,the development cost is saved,the efficiency of research and development is improved,and the risk of subsequent real car experiment is reduced,Effectively ensure the personal safety of the test personnel.
【Key words】pure electric logistics vehicle;hardware in loop;vehicle controller;VeriStand
作者简介
李之乾(1993—),女,助理工程师,硕士,研究方向为新能源电控系统硬件在环测试;曹红艳(1988—),女,工程师,硕士,研究方向为动力总成硬件在环测试;许成林(1998—),男,助理工程师,研究方向为新能源电控系统硬件在环测试;肖华东(1992—),男,技师,研究方向为负载箱制作;韩淑芳(1996—),女,技师,研究方向为负载箱制作。
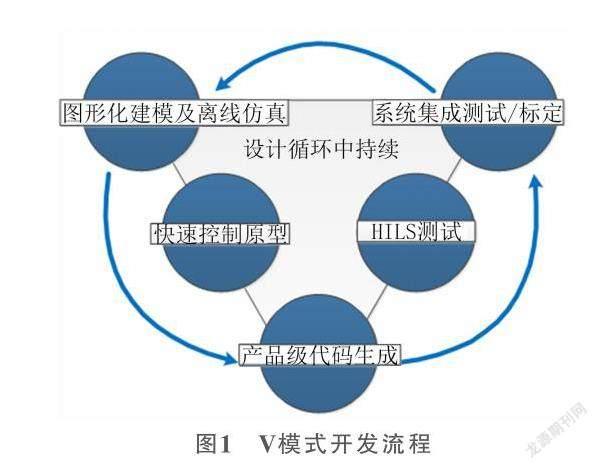
21世纪以来,随着电动汽车三电技术的进一步发展,新能源汽车的占比越来越高,未来汽车电动化已成为不可逆的趋势[1]。新能源汽车整车控制器EVCU作为汽车的“大脑”,其“聪明”程度对于整车的各方面性能起到至关重要的作用。如何更加快速高效地开发VCU已经成为车企提高竞争力的关键一步。经过多年沉淀,目前业界普遍采用V模式的开发流程[2],如图1所示。
控制器在进行装车之前需要进行十分严谨复杂的测试,仅仅依靠传统的实车测试,对测试环境、测试人员都有较高的要求,测试成本高,且极端工况下具有一定的危险性,测试结果的记录与分析难度较大,一些问题难以复现等[3],在实车测试之前进行硬件在环仿真测试可以有效解决以上问题。硬件在环即采用真实的控制器,被控对象部分采用真实元件,部分采用实时数字模型,或全部采用实时数字模型,模拟被控对象的物理行为以及传感器执行器的信号,与VCU通过硬线连接后形成一个闭环的仿真系统,可以对控制模型进行复杂的、重复的验证[4]。
本文以某公司的纯电动物流车的EVCU为对象,基于NI的VeriStand软件及PXI总线系统设计一套硬件在环测试系统,经验证能够对该车型EVCU进行功能验证。
1 HIL测试系统总体方案设计
本文基于VeriStand的纯电动汽车EVCU硬件在环仿真系统的架构如图2所示,基于MATLAB/Simulink搭建纯电动物流车的整车模型并配置行驶工况,对VCU的控制策略进行解读并根据硬件原理图配置模型I/O接口和CAN报文接口。模型编译完成后,部署到下位机NI Phar LapRT系统中,下位机通过硬线与EVCU连接,从而实现仿真模型与控制器的实时交互。做HIL测试时,通过VeriStand软件实时改变模型的参数来模拟不同的行驶工况,或通过设置动力电池和驱动电机的参数来模拟极端工况下或发生故障时的车辆行驶状态。通过刷写标定软件INCA可以对控制模型的参数进行实时监测和标定,针对不同的逻辑进行功能验证。
2 控制策略简析及仿真模型搭建
2.1 策略簡析
HIL测试需要了解EVCU的控制策略,才能够在测试过程中对相应的参数进行标定以及发现控制模型中存在的Bug。整车的控制策略动力传递路径主要是根据钥匙信号、挡位信号、油门制动踏板输入信号、电机工况以及各类传感器信号综合判断驾驶员的意图,然后根据车辆的运行工况以及是否存在故障等,对电机的输出转矩或者转速进行决策和限制,然后通过CAN报文形式发送给电机控制器,控制电机的输出转矩和转速,再根据电机反馈的实际转速和转矩,反馈调节需求转矩,从而对车辆的行驶速度进行控制。整车控制策略示意图如图3所示。
2.2 模型搭建
整车物理模型旨在模拟车辆行为,与整车控制器进行交互,因此本文的整车模型主要可分为两个部分:物理模型和交互接口,交互接口主要有I/O接口和CAN报文接口。模型架构如图4所示,中间部分为物理模型,左右两边的部分是模型控制器交互的接口。
物理模型的优劣决定了HIL测试的品质,本文物理模型是基于MATLAB/Simulink搭建,主要思路是基于整车在行驶时的动力传递路径进行建模。如图5所示。
其中转矩传递路径为:驱动电机→传动系统→车轮→整车动力学模型。转速传递路径为:整车动力学模型→车轮→传动系统→驱动电机。根据建模思路,将整车物理模型主要分为电机模型、电池模型、传动系统模型、车辆动力学模型、辅机模型和驾驶员模型。
电机模型的输入主要有电池电压、EVCU的决策转矩、电机控制模式、钥匙开关信号、冷却系统使能信号等,对应的输出主要是电机实际转矩和转速、电机的工作温度,电机母线的电压和电流等参数。
本文采用卡尔曼滤波的SOC估算法建立蓄电池等效数学模型,电池模型根据二阶RC模型等效电路模拟法建立,该电池模型结构清晰,可读性强,能够较为真实地模拟车用高压锂电池的工作特性。根据蓄电池等效电路模型,由基尔霍夫电压定律可得:
(1)
式中:U0——欧姆电阻两端电压。
根据蓄电池等效电路模拟,能够得到蓄电池等效数学模型为:
式中:SOC0——t0时刻SOC值;SOC——t1时刻SOC值;Cn——蓄电池的额定容量;I——蓄电池当前放电电流。
以上子模块输入为电池初始SOC值、电机电流、需求电压、使能信号等。输出有电池电压、SOC值、充放电功率、电池温度及电流限制等。
传动系统、车轮模型,即根据实车传动比及车轮半径等实车参数进行一系列数学运算,最后经过车辆动力学的公式运算,得到实际的驱动力、阻力及车速等参数。
车辆动力学模型计算了车辆行进过程中的空气阻力、滚动阻力以及坡度阻力等,输入为车轮驱动力矩,输出受各项阻力影响车轮的实际转速。
辅机模型,即模拟冷却风扇、冷却水泵、DCDC、空压机等设备的工作情况,接收EVCU发送的使能信号,将模拟的辅机工作信号及故障状态等发送给EVCU。
I/O、CAN报文接口,即控制器与模型进行信号交互的部分,I/O主要是车上人机交互的部分,如钥匙信号、油门制动、手刹、空调、灯光等,CAN报文接口是EVCU与车辆其他控制器、执行器进行交互的接口。
3 HIL测试系统搭建及验证
有了上面所述的控制模型和物理模型,即可根据HIL设备搭建测试系统,本文基于NI PXI总线系统搭建HIL测试系统,使用VeriStand软件进行工程匹配以及操作界面搭建。
3.1 硬件准备
HIL硬件设备如图6所示,主要组成部分包括上位机、PXI总线系统、调理模块、负载线束、程控电源以及整车控制器EVCU及接线板。其中上位机运行VeriStand软件,可控制下位机中运行的物理模型实时与控制器进行信号的交互。本文的PXI总线系统包含NI PXI-8115控制器、PXI-6220、PXI-6723数据生成采集板卡以及CAN通信板卡PXI-8512。
3.2 VeriStand工程搭建
上位機VeriStand软件中建立项目工程,输入正确的下位机IP地址,导入模型编译后生成的.dll文件和CAN报文的DBC文件,配置下位机的硬件输出输入端口并与模型中预留的I/O接口以及CAN报文接口做Mapping。打开交互界面WorkSpace,利用自定义功能建立兼顾美观与实用性的测试界面,如图7所示。
3.3 测试验证
利用前面所述的硬件设备以及搭建好的VeriStand工程,进行新能源整车控制器EVCU的一系列功能验证。
1)整车上下电功能验证。接通HIL设备电源,将VeriStand工程部署到下位机中,在打开的WorkSpace界面中,转动启动按钮,在INCA中调出控制策略中的钥匙开关信号以及上下低压、上下高压的变量,同时观察WorkSpace界面中电源指示灯以及动力电压等控件的变化。结果显示,能够通过上位机界面中的启动旋钮控制整车的正常上下电功能。
2)车辆换挡及正常行驶功能验证。在EVCU控制策略中,车辆换挡时,需先踩住制动踏板,将图8中的起动旋钮转到START,车辆起动,拖动制动控件,使其大于一定值,然后转动换挡旋钮至D挡,将制动控件拖到0,然后拖动油门控件缓慢增加,整个测试过程中观察WorkSpace车速仪表、电机转速仪表等控件的变化以及在INCA中调出EVCU控制策略的相关参数进行对比观测。车速、电机转矩、转速等参数在加速及制动工况下的变化情况如图8所示。
3)SOC、续驶里程、行驶里程等验证。保持车辆行驶一段时间后,SOC值和续驶里程都有所降低,行驶里程按照正确的速率增加。结果表明,本文HIL测试系统能够对以上功能进行验证。
4 总结
本文基于VeriStand开发环境搭建的纯电动物流车整车控制器硬件在环仿真测试平台,利用Matlab /Simulink 建立纯电动整车物理模型,连接真实整车控制器,进行实验验证并对结果数据进行分析。结果表明,该仿真测试平台在实车测试之前,能够有效测试整车控制器的主要控制逻辑,发现控制软件中的Bug,实现在测试阶段节省开发成本、提高研发效率的目的。
参考文献:
[1] 薛冰. 纯电动汽车整车控制器测试平台的设计与研究[D]. 武汉:武汉理工大学,2018.
[2] 刘永山. 纯电动汽车整车控制器开发及控制策略研究[D]. 武汉:武汉理工大学,2014.
[3] 苟毅彤. 基于纯电动汽车整车控制器的功能安全分析与设计[J]. 内燃机与配件,2020(19):47-48.
[4] 杨凡. 纯电动汽车整车控制器软件设计[J]. 时代汽车,2020(15):102-103.
(编辑 杨 景)
