基于形态学序列和多源先验信息的城市建筑物高分遥感提取
2023-05-17李治隋正伟傅俏燕郑琎琎卜桐
李治, 隋正伟, 傅俏燕, 郑琎琎, 卜桐
中国资源卫星应用中心, 北京 100094
1 引 言
城市建筑物信息作为城市核心指标要素,在城市基础信息建设和生态环境监测等方面发挥着重要的作用(杜培军,2020;李德仁,2018;王俊 等,2016)。随着城市信息化进程的加快,传统监测方法难以满足及时有效获取信息的需求。高分辨率遥感影像(高分影像)能够为城市提供大范围、精细化和高频次的监测信息,已然成为了城市建筑物监测的主要数据源(杜培军 等,2018)。因此,基于高分遥感数据的城市建筑物自动提取研究成为了学者们广泛关注的重点和热点问题。
目前基于高分遥感的城市建筑物提取方法分为4 种类型,具体包括:(1)建筑物模型法;(2)辅助高程数据;(3)影像特征提取和(4)面向对象法。在这些方法中,基于影像特征提取和面向对象方法均具有良好的空间拓展性和多源信息鲁棒性,从而被广泛研究与应用(张亚一 等,2020)。相比于面向对象方法难以挖掘高维空间特征的缺点,影像特征提取更适用于复杂城市场景下的建筑物信息表达,尤其是具备高维空间拓展能力的形态学特征(Wang 和Wang,2021)。当前被广泛应用于城市建筑物提取的形态学特征主要分为形态学结构序列特征和形态学属性序列特征两类模式(Li 等,2020)。前者根据建筑物的大小、方向、形状等属性,设计多尺度和多角度的结构体元素进行高维度特征表达,从而提升典型城市建筑物特征的显著性。目前国内外学者基于形态学结构序列开展一系列研究,如:扩展形态序列(EMPs)、差异形态序列(DMPs)、形态学建筑物指数(MBI)、面向对象的形态学建筑物指数(OBMBI)和建筑区—建筑物联合指数(LFP-SIMBI)等(You等,2018;林祥国和张继贤,2017;Marpu 等,2012;Huang 和Zhang,2012;Fauvel等,2008)。后者则顾及建筑物的面积、惯性矩和灰度标准差等建筑物区域特性,构建多尺度规则从区域属性提升城市建筑物特征表达能力。当前学者们发展了一系列以形态学属性序列特征为基础的改进方法,如:差分属性序列(DAPs)、自动的差分属性序列(ADAPs)、AMAP-OBC 和MABI(Wang等,2019;Ma等,2019;Cavallaro等,2017;Geiß等,2016;Dalla 等,2010)等。分析上述研究可得,形态学结构序列特征具有良好的兼容性和可拓展性,随着研究的不断深入可以对复杂多样的建筑物类型进行有效的特征表达,然而不足之处在于特征的“过表达”问题,从而易于导致建筑物提取结果的漏分问题。另一方面,形态学属性序列采用区域规则对建筑物进行高维度特征表达,提升了建筑物识别的准确性,较好的克服了建筑物的漏分问题,但其存在特征的“欠表达”问题,造成建筑物信息明显的错分问题。综上所述,虽然两种模式形态学序列特征对城市建筑物表达与提取已经取得良好的研究成果,但单一模式形态学序列特征均存在局限性(苏志鹄 等,2015;Lv 等,2014)。因此,如何充分发挥两种模式形态学序列特征的优势且弥补彼此模式的不足,是进一步提升城市建筑物特征表达能力的关键。
在建筑物信息自动提取方面,随着与建筑物相关的地理信息产品日渐丰富及其精度、分辨率、时效性和区域性等指标的不断提升,将其作为先验信息应用于建筑物自动提取成为了研究的趋势(魏东升和周晓光,2019)。目前辅助先验信息的自动提取研究主要集中于对地物类型进行干预与修正或作为样本直接参与分类(Cué 等,2019),显然这种方法忽略了先验信息与目标要素之间存在的尺度差异性,从而影响了建筑物提取精度和稳定性。此外,目前多数研究多集中于从先验信息与目标要素之间的正相关性出发,较少顾及负相关先验信息对建筑物噪声的抑制作用。因此,根据城市建筑物特点,如何进一步挖掘负先验信息并在尺度差异条件下自动的提取建筑物信息成为建筑物自动提取研究中亟待攻克的问题。
本研究基于高分遥感影像提取多模式形态学序列特征,并通过引入与城市建筑物相关的多源先验信息构建自适应分割模型将两种模式形态学序列特征融合,旨在充分发挥各自特征的优势,提升城市建筑物特征的综合表达能力,克服单一模式特征表达能力不足的问题。此外,本研究根据城市建筑物特性对多源先验信息进行细分与应用,发展了先验信息尺度差异条件下的阈值自动分割方法,实现了城市建筑物信息的自动提取。
2 城市建筑物提取方法
本文提出的城市建筑物提取方法流程主要分为4 步(图1):(1)多模式形态学序列特征提取。基于高分遥感影像分别提取差分形态学结构序列特征和差分形态学属性序列特征;(2)形态学序列特征优选。应用高维特征优选模型分别对两种模式形态学序列进行特征优选,获取相应的形态学优选特征;(3)建筑物信息自适应分割。基于负相关先验信息建立掩膜模型,并结合正相关先验信息构建自适应分割模型对获取的形态学优选特征进行分割,获取城市建筑物初始信息;(4)基于投票法的决策级融合。采用投票法对获取的初始城市建筑物信息进行决策级信息融合,得到最终的城市建筑物提取结果。
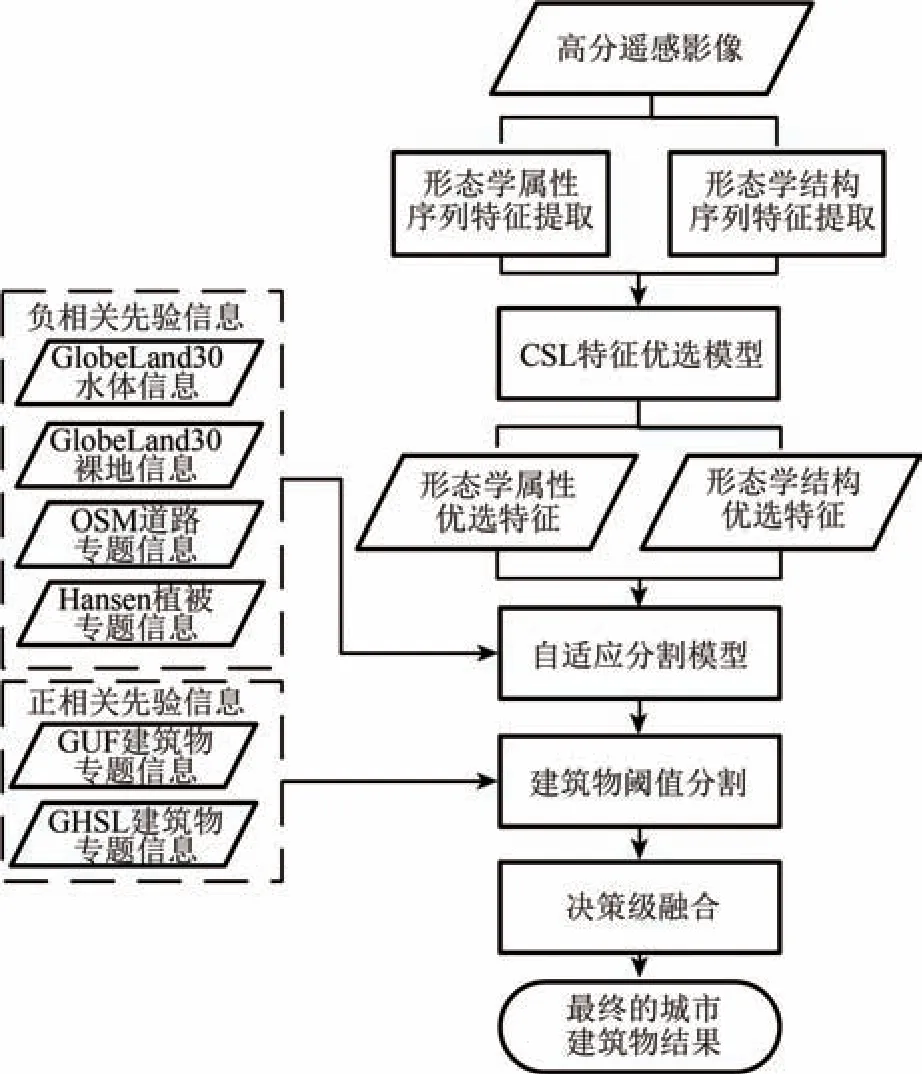
图1 建筑物提取流程图Fig. 1 Flow chart of building extraction
2.1 多模式形态学序列特征提取
本研究基于高分遥感影像提取多模式形态学序列特征,分别获取形态学结构序列特征和形态学属性序列特征,为后续城市建筑物信息自动提取提供多模式高维序列特征。
2.1.1 形态学结构序列特征提取
针对高分遥感影像的建筑物个体特性,采用“自下而上”策略从城市建筑物的大小、方向和形状等属性进行形态学结构序列特征表达。具体步骤如下所示:
(1)多尺度多方向的形态学结构序列构建。采用形态学开重建和闭重建提取不同尺度和方向的建筑物形态学序列特征。其公式如下:
式中,ΠγR(f)和ΠφR(f)分别为形态学开重建序列和形态学闭重建序列;Πγλi和Πφλi表示在序列的位数i时以结构体元素λ对原始影像分别进行形态学开重建和形态学闭重建的特征影像结果;(f)和表示在序列的位数i时以结构体元素λ对原始影像分别进行形态学开重建和形态学闭重建;γR(f)和φR(f)分别表示对原始影像进行形态学开重建和形态学闭重建;f表示高分遥感影像;x为高分遥感影像的像素值;λ表示形态学结构体元素;i表示序列的位数。
(2)差分形态学结构序列提取。在多尺度多方向的形态学结构序列特征基础上,为了进一步提升多尺度建筑物轮廓的显著性水平,本研究采用差分方法构建等差序列的结构序列特征,从而实现对结构序列之间细节特征的增强。其公式如下:
式中,ΔγR(f)和ΔφR(f)分别为高分遥感影像的差分形态学结构体开重建序列特征和差分形态学结构体闭重建序列特征;Δγλi和Δφλi分别表示在序列的位数i时以结构体元素λ对原始影像分别进行形态学开重建和形态学闭重建的差分特征影像结果。
(3)差分形态学结构序列特征建立。将差分形态学结构体开、闭重建序列特征联合,获取最终的差分形态学结构序列特征。其公式为
式中,DMPs(x)为差分形态学结构序列特征。
2.1.2 形态学属性序列特征提取
根据城市建筑物区域属性和灰度变化等特征进行一系列属性特征的细化和粗化滤波,其基本思想为从区域角度“自上而下”的构建一些列建筑物属性序列对影像进行形态学滤波计算,其中建筑物属性主要包括不同尺度的区域形状属性(如:面积、区域对角线、外接矩等)和灰度变化相关属性(均值和标准差等),从而得到建筑物的空间几何结构。具体步骤如下所示:
(1)形态学属性剖面构建。应用面积属性、外接矩和标准差准则构建属性细化/粗化剖面。其中,基于门限分析原理将二值图尺度上推到灰度影像,并采用最大树的数据结构进行滤波计算。灰度属性细化剖面的公式为
式中,γA(f)和φA(f)分别表示以属性A对原始图像f进行形态学开重建和形态学闭重建;Thk(f)代表获取以灰度级k为阈值的影像f的二值图像;k为影像f的灰度级;Γm和Φn表示m和n在取Thk(f)二值图像分别取像素值1 时和像素值0 时的特征图;和分别表示在尺度μ时以属性A进行属性开运算和属性闭运算;T为属性A所取到的阈值;A表示属性类型;μ代表形态学属性的尺度;f表示高分遥感影像;x为高分遥感影像的像素值。
(2)差分属性剖面。为了对建筑物的多形态进行综合表达,利用属性准则剖面具备的方向和多尺度特性构建形态学属性细化和属性粗化序列。同时,为了增强建筑物的轮廓信息,采用等差序列对建筑物边缘信息进一步增强。计算公式为
(3)差分形态学属性序列特征建立。将差分形态学属性开、闭重建序列特征联合,获取最终的差分形态学属性序列特征。具体方法为
式中,DAPs(x)为差分形态学属性序列特征。
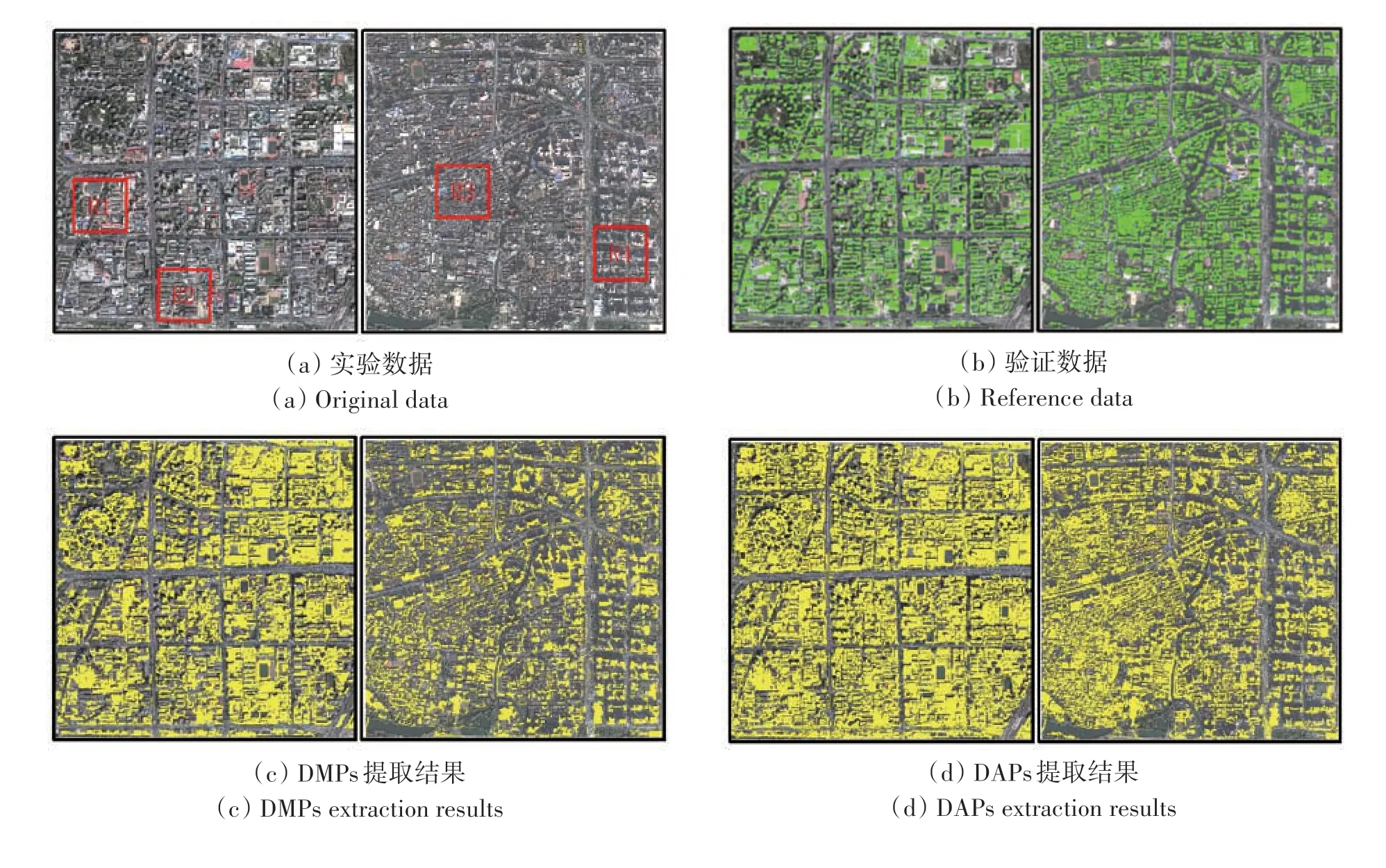
图2 显示中原始影像为2 m 空间分辨率的高分一号影像,其中图2(a)和图2(b)分别为本文DMPs 和DAPs 形态学序列提取结果。从图2(a)可得,DMPs 算法增强了个体建筑物的特性信息,然而对规则建筑物存在部分漏分现象。从图2(b)可得,DAPs 算法虽然增强了规则建筑物信息,但同时引入部分易混类型信息。因此,根据图2中可得,两种模式形态学序列特征优势互补,达到增强建筑物显著性的目的,能够有效的支撑后续多模式特征融合的建筑物信息提取。
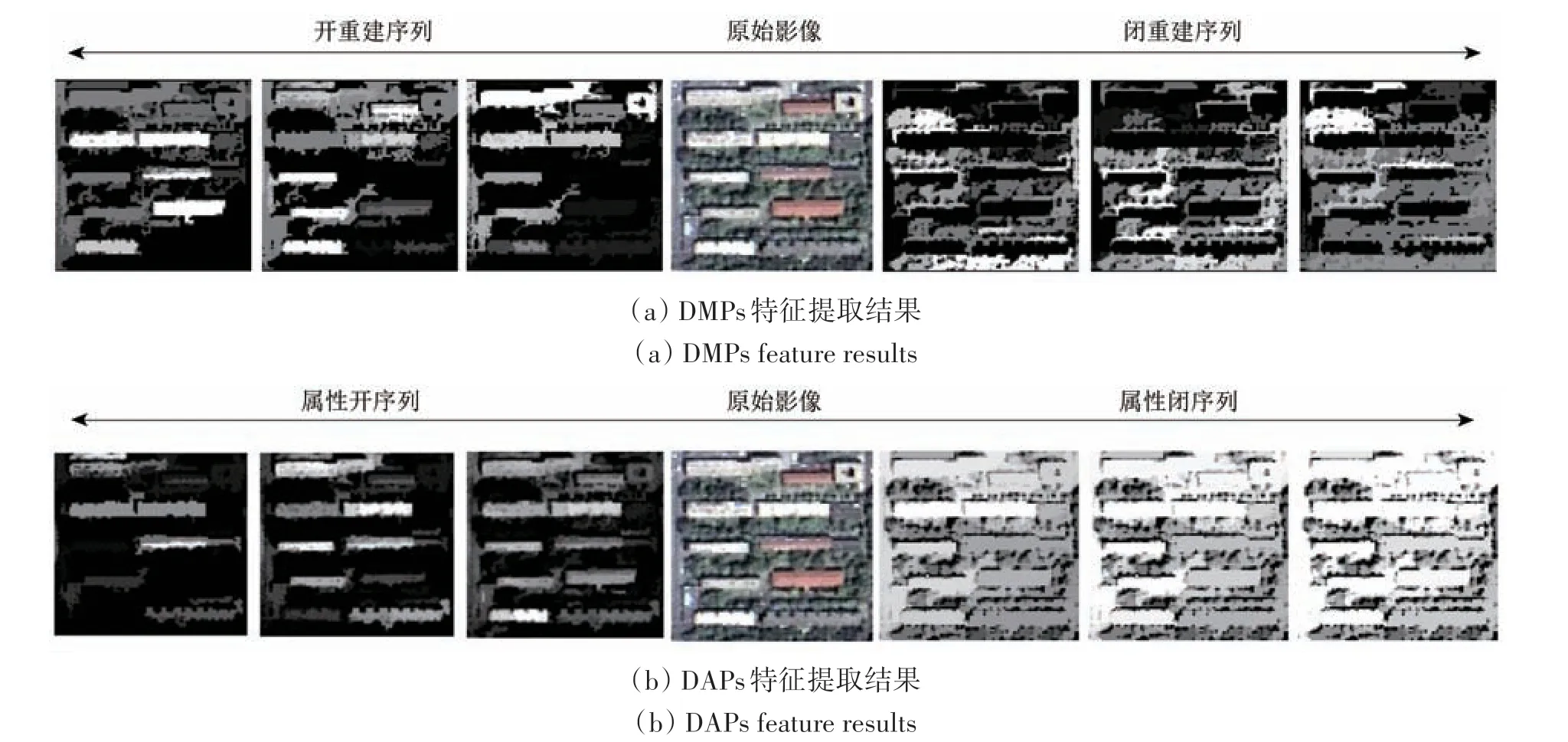
图2 本文多模式形态学序列特征提取结果示意图Fig. 2 Multi-modal morphological sequence features
2.2 多模式形态学序列特征优选
特征显著水平模型CSL(Characteristic-Saliency-Level Model)能够较好的为形态学序列特征提供高维特征优选和压缩方法(Pesaresi 等,2012)。CSL模型通过采用无统计模型的方法减少分解的维数,避免了基于给定图像特征序列的统计分布进行聚类。其优势在于模型的计算不依赖于特征的维度且不需要手动调整参数。因此,该模型适用于形态学序列特征优选。具体计算步骤为
(1)分别计算DMPs(x)和DAPs(x)的特征最大值,获取相应形态学序列开闭重建的最值:
(2)通过对开闭重建最值的判断,获取形态学序列显著度(信息量)最高的特征作为形态学序列最优特征的选择结果。计算公式如下所示,
从图3 中DMPs 和DAPs 的特征优选结果可得,本研究所采用的特征优选算法能够较好的保持原有形态学序列特征的主要信息,同时很大程度的降低了特征冗余问题,从而在一定程度上抑制了建筑物噪声,结果表明CSL模型特征优选算法的有效性。
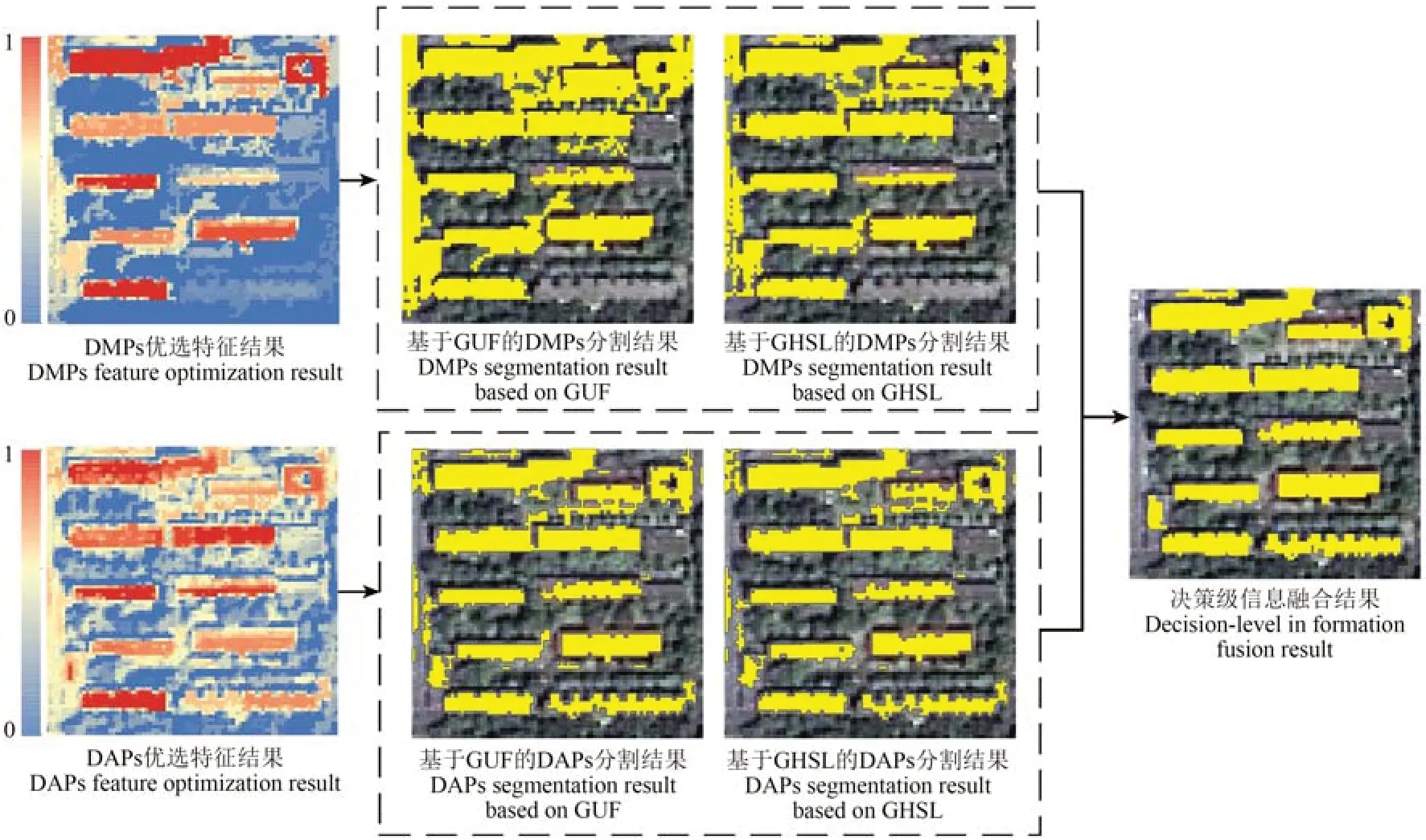
图3 本研究特征优选及自适应分割处理结果示意图Fig. 3 Feature optimization and adaptive segmentation results
2.3 基于先验信息的城市建筑物自适应分割
本研究根据建筑物属性特点将多源先验信息细分为建筑物正、负相关先验信息。根据负相关先验信息构建掩膜模型,并联合正相关先验信息对优选的形态学特征进行自适应分割,最后通过信息融合获取最终的城市建筑物提取结果。具体步骤如下:
(1)基于负相关先验信息的掩膜函数构建。由于城市建筑物的复杂性,易与城市道路、裸地、植被和水体等要素混淆,因此通过引入负相关先验信息构建专家知识库尝试抑制混淆噪声等问题。具体掩膜函数如下所示:
式中,GlobeLand30(water,bare),OSM 和Hansen 分 别表示GlobeLand30 地表覆盖产品中的“水体类型”、“裸地类型”,Openstreetmap 产品的“道路类型”以及Hansen产品的“植被类型”;I表示优选特征。
(2)基于正相关先验信息的城市建筑物阈值自适应分割。本研究引入全球城市足迹数据GUF(Global Urban Footprint)和全球人类居住区数据GHSL(Global Human Settlement Layer)的专题信息产品作为城市建筑物正相关先验信息。为了克服先验信息因尺度差异引入的误差,本文根据正相关先验信息与目标要素存在空间趋势一致性的特点,采用面积匹配方法进行阈值分割。即通过探索特征图像的一系列阈值,当特征阈值分割结果与正相关先验信息之间的面积差异度最小时,表明所选阈值获得建筑物结果的相关性最高,从而作为最优的分割阈值。此外,为了能够抑制易混噪声的影响,本研究将已构建的掩膜函数与其相交,从而进一步提升阈值自动分割结果的准确性。具体计算方法如下式所示:
式中,X是自适应分割结果;I为优选特征;t为优选特征I的像素值区间;Area为当阈值为t时特征图像分割结果的区域面积;BU为正参考样例中的建筑物类型;q为选择的正参考样例产品。
(3)基于投票的决策级信息融合。本研究采用基于投票的决策级融合方法将建筑物自适应分割结果进行信息融合,进一步消除噪声的影响,获得最终的城市建筑物信息结果。具体公式为
式中,OBU表示最终的城市建筑物提取结果;OtGUF和OtGHSL分别表示以GUF和GHSL作为正相关先验信息进行阈值分割获得的城市建筑物提取结果;k代表阈值;n表示特征数量。
从图3 可得,本文基于GUF 和GHSL 产品分别对优选特征DMPs 和优选特征DAPs 进行自适应分割获取的建筑物信息较为完整,并通过信息融合能够进一步抑制噪声对提取结果的影响。结果表明本文算法能够在先验信息尺度差异条件下有效地对城市建筑物进行自动提取,并能够较好的发挥两种模式形态学序列特征各自的优势,达到特征优势互补的目的。
3 实验数据与分析
3.1 实验数据
本文分别选取了两景不同城市场景下的高分遥感影像对本文提出算法的精度和有效性进行验证与分析。所采用的原始影像分别为2016 年4 月9日和2016年9月3日的2 m全色和8 m多光谱高分一号遥感影像。其中,试验数据经过Gram-Schmidt Spectral Sharpening 融合处理,空间分辨率为2 m,影像大小均为1000 像素×1000 像素。图4(a)为所选择的两个实验区域覆盖类型,具体包括:林地,草地,建筑物,阴影,道路,不透水地表和裸地。其中,所选试验区内建筑物类型丰富。在光谱方面,根据建筑物屋顶的材质不同呈现出暗屋顶和亮屋顶属性,且亮屋顶的色彩差异性大。在几何形状方面,试验区内建筑物的形状、大小和结构等几何属性多样,具体包括高层建筑、中层规则居民区、中层不规则居民区、低矮散落式房屋和低矮连片式房屋,且部分房屋被植被部分遮盖。因此,本研究所选的试验区具有一定的代表性。
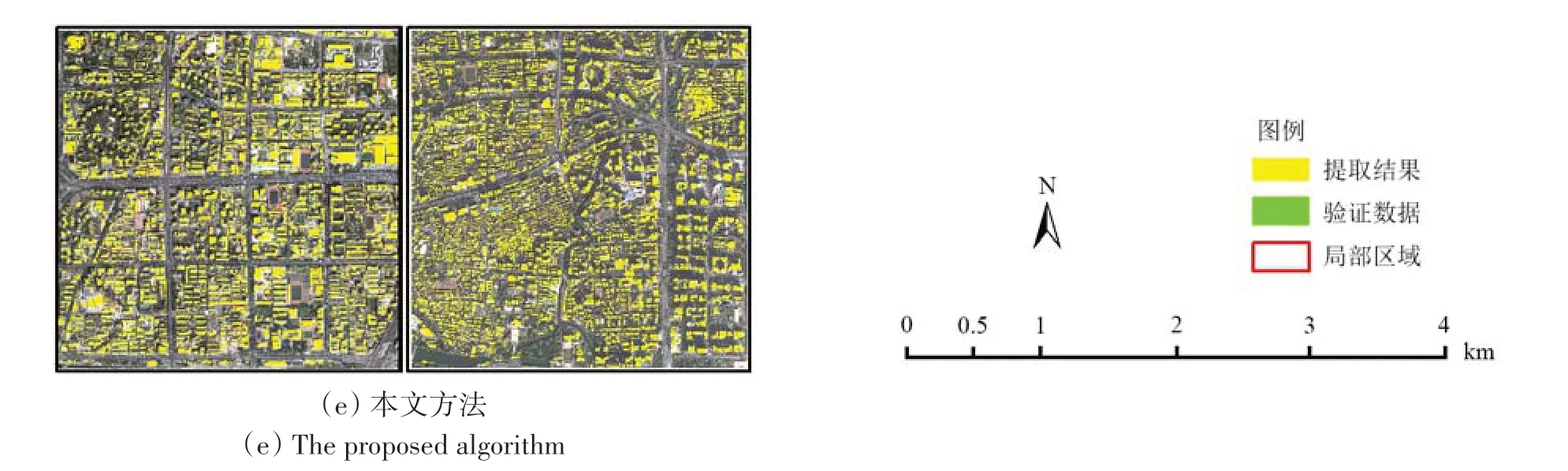
图4 实验对比Fig.4 Experimental comparison
本文中所采用的负相关先验信息产品包括:2010年GlobeLand30的水体类型和裸地类型信息产品、2013 年Hansen 植被类型信息产品和2015 年Openstreetmap 道路类型信息产品;正相关先验信息产品为2011 年GUF 建筑物信息产品和2014 年GHSL 建筑物信息产品。此外,验证数据是通过高分辨率影像人工解译和实地调绘获取。本文所应用的数据源信息如表1所示。

表1 数据源信息表Table 1 Data source information list
3.2 结果与分析
采用本研究提出的算法对试验数据开展城市建筑物信息自动提取,并与DMPs 和DAPs 算法的提取结果进行对比分析。其中,本文算法根据建筑物的空间几何属性,分别设置DMPs 和DAPs 算法参数为:DMPs 算法中结构体的角度和尺度分别为{0°,45°,90°,135°}和{11,19,…,59},步长为8;DAPs 算法中面积属性:{121,361,729,1225,1849,2601,3481}、惯性矩属性:{0.2,0.3,…,0.9},步长为0.1 和灰度标准差属性:{10,20,…,80},步长为10。阈值k为0.6。图4 (b) 为建筑物的验证数据,图4 (c) 和图4(d)分别为使用DMPs 和DAPs 算法提取的城市建筑物结果,图4(e)为本研究算法提取建筑物的结果。图5为各试验数据不同类型建筑物提取结果的局部放大图,分别对应于图4(a)红色矩形区域(编号R1-R4)。
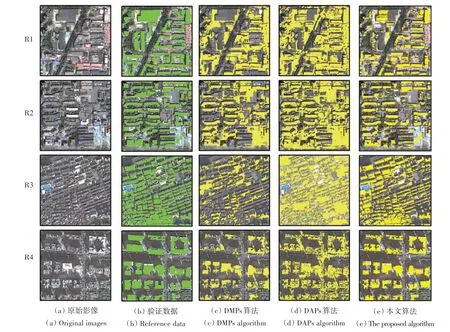
图5 提取结果局部细节对比(R1-R4分别对应于图4(a)R1-R4标记的区域)Fig.5 Comparison of local details of extraction results (R1-R4 in Fig.5 corresponds to the area labelled by R1-R4 in Fig.4(a))
通过图4的对比分析可得,本文提取的城市建筑物结果与采用DMPs 和DAPs 算法提取结果的整体格局及空间分布基本一致。从图4(c)中可得,DMPs 方法的提取结果较好的识别出不同形态类型的建筑物,但存在一定程度的漏分问题,其主要原因在于DMPs 算法增强了个体建筑物的表达能力,而忽略了部分建筑物的整体一致性,从而导致建筑物漏分问题。根据图4(d)可得,DAPs 方法的提取结果在一定程度克服建筑物特征“过表达”带来的漏分问题,从整体上较为完整的识别了建筑物信息,但由于忽略了建筑物与其他易混地物类型的特征差异性,导致建筑物错分问题。与上述两个提取结果相比,本文方法(图4(e))提取的建筑物信息完整性和准确性均较好,表明本文方法较好的融合DMPs 和DAPs 算法的优势,克服了各自模式中的不足,在复杂的城市场景下能够准确有效的提取建筑物信息。
为了定量评价本文方法的提取精度,采用总体精度OA(Overall Accuracy)、Kappa系数、用户精度UA(User’s Accuracy)和制图精度PA(Producer’s Accurcy)等精度评价指标对试验结果进行精度评价与对比分析(Liu 等,2007)。其评价结果如表2所示,本文提出的方法在两个试验区提取的平均精度和Kappa系数分别为91.3%和0.87,比DMPs和DAPs 提取方法的平均精度85.7%,83.5%和Kappa系数0.81,0.78 分别提高了5.5%,7.8%和0.07,0.1,表明了本文方法在城市建筑物自动提取的有效性。其中本文方法的平均制图精度为90.5%,比DMPs和DAPs方法的制图精度83.0%和86.1%分别提升了7.5%和3.9%,表明本研究建筑物提取的错分率低于DMPs 和DAPs 方法。同时,DAPs 方法的制图精度比DMPs 方法高了3.1%,表明DAPs 方法的漏分率低于DMPs。其原因在于,DAPs 方法从建筑物规则属性出发,较好顾及城市建筑物的整体属性,而DMPs 方法对城市建筑物特征的“过表达”导致一定程度的漏分。本文方法的平均用户精度为91.7%,比DMPs 和DAPs 方法的88.7%和77.0%分别提升了3%和14.7%,表明本研究建筑物提取的漏分率低于DMPs 和DAPs 方法。同时,DMPs方法的用户精度比DAPs方法高11.7%,表明DMPs 方法的错分率显著低于DAPs。其原因在于DMPs 方法能够较好的表达复杂城市场景下多形态类型的建筑物,而DAPs 方法的区域规则序列难以全面顾及建筑物形态存在的个体差异性。综上所述,本文方法的制图精度和用户精度均高于其他两种方法,表明本文方法兼顾了两种方法的优势,并有效的抑制了各自方法的缺陷,较好的降低了错分率和漏分率,从而全面的提升了建筑物提取精度。

表2 实验区域的建筑物提取精度Table 2 Accuracy of building extraction in the experimental area
4 结 论
本文提出了一种多模式形态学序列特征和多源先验信息协同的城市建筑物高分遥感自动提取方法。该方法的关键是采用多源信息构建的自适应分割模型将两种模式形态学序列特征融合,从不同模式联合对城市建筑物空间信息进行挖掘,充分发挥每种模式形态学序列特征的优势,从而实现城市建筑物精确自动的提取。实验结果表明,本文方法能够在复杂城市场景下有效且自动的提取建筑物信息,精度优于单一模式形态学序列特征,且较好的克服了先验信息因尺度不一致性所引入的误差。本文方法的优势在于:
(1)提出了一种多模式形态学序列特征信息融合方法,该方法充分利用各自模式形态学序列特征的优势,提升了城市建筑物特征的综合表达能力,克服单一模式形态学序列所导致精度降低问题;
(2)特征优选与特征压缩。采用特征显著水平模型对本文多模式形态学序列进行特征优选,较好的保存各自模式形态学序列特征的信息且避免了信息冗余问题;
(3)构建基于多源先验信息的自适应分割模型,实现在先验信息尺度差异条件下的建筑物信息自动提取。实验结果表明,该方法提取的城市建筑物结果总体精度较高,在充分发挥两种模式特征优势的同时避免了人工选择阈值带来的误差与耗时,从而验证了本研究自动提取方法的有效性;
(4)本文方法实现了准确、快速且自动化的城市建筑物信息提取与更新,为更多城市的建筑物快速监测提供方法参照模板。
需要说明的是,本研究提出的自适应分割模型虽然顾及到先验信息尺度差异性问题以及对多源先验信息的细分与应用,模型具备较好的提取效果,然而本研究的不足在于对各类先验信息在提取过程中的贡献量缺少定量化评价。在后续的研究中,将定量化的研究与分析各类先验信息的作用,从而为提升建筑物提取精度和自动化程度提供定量化指标参考。
