光伏发电最大功率追光系统研究与设计
2023-05-16王佳旺吕海英
王佳旺,吕海英
(天津农学院,天津 300384)
能源是各个国家发展的重要资源,对于每个国家发展都不可或缺。随着历史的推进、文明的发展,人类不断开采使用着世界上的不可再生能源,如石油、天然气等,不可再生资源日渐枯竭。近年来,各国也因为能源问题产生了一系列争端甚至发动了战争。为了今后人类的生存和发展,需调整整个世界的能源结构,减少存在污染的不可再生能源(如原油、煤炭等)的使用,解决能源冲突成为了全世界需要面对的严峻问题。为了可持续发展,世界各国开展了对可再生能源如太阳能、风能、水能、潮汐能等能源的研究。目前,太阳能已经被广泛应用于社会生活中,并且由于它分布广泛、总量巨大、无污染的巨大优势,应用前景极为广阔[1],因此使用光伏发电取代传统发电方式成为了一项改变能源结构的重要举措。太阳能发电技术是在科技的推动下,升级国内能源产业结构的一个重要措施[2],中国也应尽快发展光伏发电技术,实现能源转变。
虽然太阳能资源非常丰富,但收集困难,而且由于太阳位置持续改变,传统固定式安装的光伏组件不能跟随太阳转动,只能在固定时间段正对太阳[3]。国内对太阳能的收集及利用主要使用大面积铺设太阳能板的方法,较少地区使用了单轴追光的方法来追踪太阳。利用这2 种方法都不能准确高效利用太阳能资源,都是不够先进的资源采集方式。由此可见,中国在追光系统的研究上距离世界存在着较大的差距,有很高的提高空间。太阳能的利用效率一直受限于技术水平得不到提高,所以怎样提高太阳能的利用效率成为人类利用太阳能的关键[4]。通过对国内外追光系统的观察发现,目前世界各国都投入了更先进的技术和机器提高对太阳追踪技术的研究,期望更加有效地提高太阳能的利用率。
本文分析了追光原理和扰动观察法,使用单片机技术来实现智能追光,最大化利用太阳能,建立仿真模型并进行系统设计。
1 追光原理
如今光伏产业在现代化工业的推进下蓬勃发展,采集太阳能的方式也变得多种多样。但如今使用最多、最主流的依然是大面积铺设太阳能采集板。通过整流电路等获取的太阳能储存在电池内部,目前光伏发电系统发电功率一般为16%~18%,发电成本较高[5]。因此提高太阳能板的采集效率是追踪系统需要解决的重要问题,需选择合适的方法追踪太阳位置来确保太阳光能够直射采集板。现如今投入追光系统的方法通常为视日运动轨迹追踪法和光电跟踪法2 种。
视日运动轨迹法则原理是地球围绕太阳进行公转,因此太阳发生的偏转度各不相同,可通过模拟,根据历年以来的太阳方位角、高度角等参数进行计算,利用数据预测出太阳的日出日落时间,再利用控制器来控制调整步进电机追踪太阳。计算公式如下:
式(1)中:γ为太阳时间角;φ为当前所在纬度;δ为太阳的赤纬角。
由此可推测出太阳日出日落时间,但是这种方法仅仅能预测太阳的移动轨迹,并不能消除误差,需要在系统工作后进行调整、校正,并且计算的参数也相当复杂,很容易产生因计算错误导致的较大误差。
光电跟踪法是准备2 个光敏管并将其放置到太阳能采集板的2 个位置上,当太阳转动、光线角度发生偏移时,光敏管采集的光信号发生改变,当发生改变的差值小时,电机处于静止状态,继续在同一位置采集太阳能;当发生改变的差值超出允许范围时,系统开始控制电机转动,使太阳光线照射到光敏管时的数值达到设置范围,将电信号的变化情况进行分析、判断、处理,用以驱动步进电机运转以改变跟踪装置位置达到准确聚集太阳光的效果[6]。光电跟踪法的设计结构相对简单,对太阳的追踪也随时变化,准确度相对较高。但整体来看,这种方法容易受到恶劣天气的影响,当整体环境光线较弱时(如阴天),由于各个角度接收到的数字信号值大抵相同,系统无法判断哪个角度光线较强,容易引起系统的错误操作,无法实现准确跟踪。
这2 种追踪方式都有着一定的优缺点。视日运动轨迹法需精确预测出太阳的行动路线才可以减小误差,达到准确的追踪效果,需要随时进行调整来确保系统的可实行性。而光电跟踪则需要考虑天气问题来提高系统的精度,由以上理论经验可得出,视日运动跟踪法可以弥补光电跟踪的缺点,能在任何气候条件下使光伏发电系统得到稳定而可靠的跟踪控制。这种跟踪方式跟踪准确度高,工作过程稳定,可应用于许多大中型光伏发电自动跟踪装置。因此首先利用双轴跟踪系统,采用视日轨迹跟踪技术对系统的初始状态进行设置,再另行放置光敏管在太阳能采集板的两侧,实时对太阳的位置进行跟踪,达到日轨迹符合视日轨迹跟踪预测时正常追光,当不符合预测轨迹时利用光电跟踪技术及时对系统跟踪情况进行调整,实现对太阳的准确追踪。
2 追光系统最大功率点的选择
采用上述跟踪法、利用太阳能采集板追寻太阳位置,尽量使太阳光直射采集板,太阳电池存在唯一功率输出最大点,这个点也被称为光伏最大功率点[7],在工作中经常称这个功率最大化的点为MPPT(最大功率点跟踪)控制点。为了提高追踪系统的准确性,选择了扰动观察法来调整光伏发电追踪系统的追踪情况。
扰动观察法主要是通过变换系统的占空比,并且以此来影响扰动Bооst 电路输出时的输出电压,再根据对比扰动产生的变化来预测下一次的扰动方向,保持系统持续输出最大功率。如当电压增大时功率也随之增大,下一次就会朝着相同的方向发生扰动,反之则向着反方向扰动。扰动观察法具体流程如图1所示。

图1 扰动观察法输出结果
使用扰动观察法建模,将温度设定调整为恒定25 ℃,将光照强度进行改变。在0~0.2 s 时,S=1 000 W/m2;0.2~0.3 s 时,S=800 W/m2;0.3~0.45 s时,S=600 W/m2。
根据仿真结果,当光照强度发生变化时,利用扰动观察法在改变太阳辐射强度并重新达到稳态后需要约0.02 s。但通过观察发现,扰动观察法的电流、电压以及输出功率的曲线波形变动较大,重新寻优的时间较长,说明此控制方法的稳定性和准确性不足。为了提高系统的稳定性和快速性,考虑将Fuzzy-PID 复合控制算法结合扰动观察法,达到预期效果。Fuzzy-PID复合控制算法的结构如图2 所示。
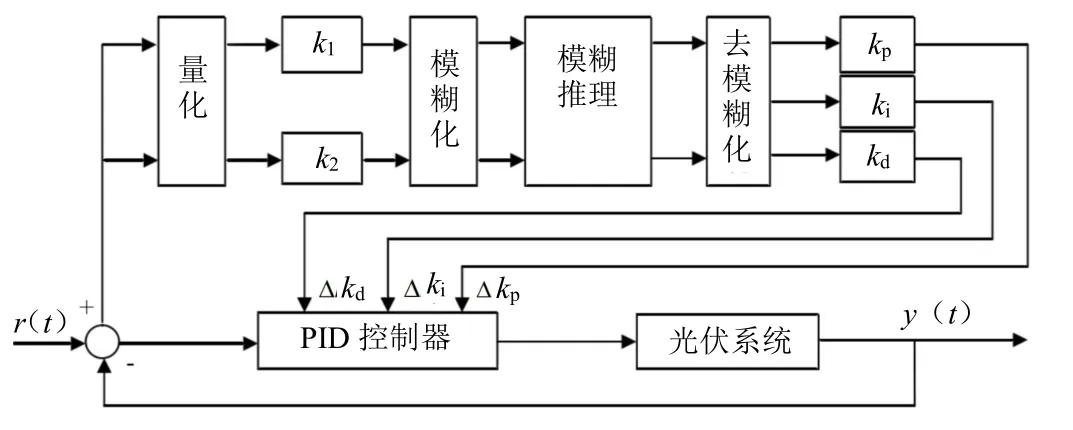
图2 Fuzzy-PID 复合控制算法结构图
结合2 种算法,在大偏差范围内采用模糊控制,而小偏差范围内采用PID 控制,能达到更好的控制精度与控制性能,能够很好发挥2 种控制方法的优点,拥有模糊控制的良好动态性能和PID 控制消除稳态误差的功能,使得系统在局部阴影下能够更稳定运行,提高光伏发电系统的输出效率。
将e和eс作为输入量,经过量化因子k1和k2将输入变量投射到模糊控制器后得到输出量kр、ki、kd,再经过相应的量化处理后的kр、ki、kd通过PID 控制器后得到控制量。
采用加权平均法,计算得到在不同状态下的kр、ki、kd如下:
式(2)中:{ei,Δei}р、{ei,Δei}i、{ei,Δei}d为kр、ki、kd的校正量。
使用Fuzzy-PID 复合控制算法,当光照强度变化时,其曲线相比较振幅较小更加平滑,寻优速度明显加快,跟踪精度较高,稳定性更好,控制效果更加理想。
3 单片机系统的设计
结合2 种追踪法实现对太阳光的高效追踪,以此提高系统的整体准确度并高效率运行。因此需要对采集的信号进行处理,利用驱动电机来调整太阳能电池板的角度,实现系统跟踪目的。
由此来看,单片机在系统设计的设备选择方面具有优势。单片机整体上体积小、内部系统结构简单,能够实现模块化内容,有很大的操作空间;能在低电压的情况下持续工作,有低功耗的天然优势;数据处理也迅速准确,运算能力较强,可以完美适应当前的系统设计。目前市面上使用的单片机主要有51 系列和89 系列,相对于51 系列,单片机89 系列的单片机编程高压更低,内部配件也更加全面,因此选择了单片机功能更多、选择更多的STC89C52 单片机作为核心主控芯片。
STC89C52 单片机是一种具有较低功能损耗、容易编程、操作简单的高性能8 位单片机。其片内有可擦除一万次的制度程序存储器,拥有40 个功能强大的引脚,功能各不相同,在实现不同系统功能时,将这40个单片机引脚进行灵活编程、活泛运用,划分出具体功能逻辑模块,实现各区域系统不干扰、不冲突。在了解了引脚功能和模块的大前提下,应用了本单片机对该系统进行了应用设计。
单片机能够正常工作之后,光照信息的采集也是系统准确工作的一项重要指标,是系统正常工作的一个重要环节。采集光照的光敏电阻也是保证系统稳定性的一个重要器件。光敏电阻是一种特殊的可以反映太阳能强度的电阻,它主要由半导体材料构成,电阻阻值会通过光照强度的变化而变化,整体形状小,方便安装使用且造价成本很低,反应速度也很快,稳定性和经济性方面都比较适合本系统。因此本系统采用了光敏电阻GL3516 作为光电检测的元器件。而采集到的太阳光强信号是一种模拟信号,使用ADC0832 作为本系统的A/D 转换芯片,将光照信息转化成单片机控制模块可直接运算的数字信号。通过模拟信号与数字信号的转换器来协同单片机工作,驱动系统的追光控制,采集准确的光照信息,便于系统开展工作。系统整体结构如图3 所示。
在单片机程序的编写开发中,为了系统完整实现智能追光的功能,本系统设计选择的是Kеil5 编程软件。在系统的主程序设计当中,首先对模块进行初始化,开启对太阳光的自动跟踪,光敏电阻检测光照强度后单片机根据光敏电阻反馈的数字信号进行分析运算,进入主循环。当进入程序开始执行后按键启动系统执行,控制太阳能采集板旋转位置和行为方式,通过A/D 转换得到的数字信号执行程序,从函数程序中获取各个角度不同的光照强度,根据不同的信号分析与逻辑选择,显示出4 个光敏电阻所采集到的东、西、南、北光照值,分别位于LCD 显示屏的左上、左下、右上、右下。系统的软件程序是这个系统的核心部分,总体来看系统将光照信号转换为数字信号后通过单片机控制太阳能采集板来实现追踪。同时处理信息驱动步进电机工作,使电机始终靠近光照强度高的位置,如东部的光照强度大于西部的光照强度时控制东西转动的步进电机机向东发生偏移,通过各个数据传序。
重复上序流程,使系统能够自行判断各个位置光照强度的强弱,并根据反馈信息达到自动控制状态、实现追光目的。单片机主程序流程图如图4 所示。
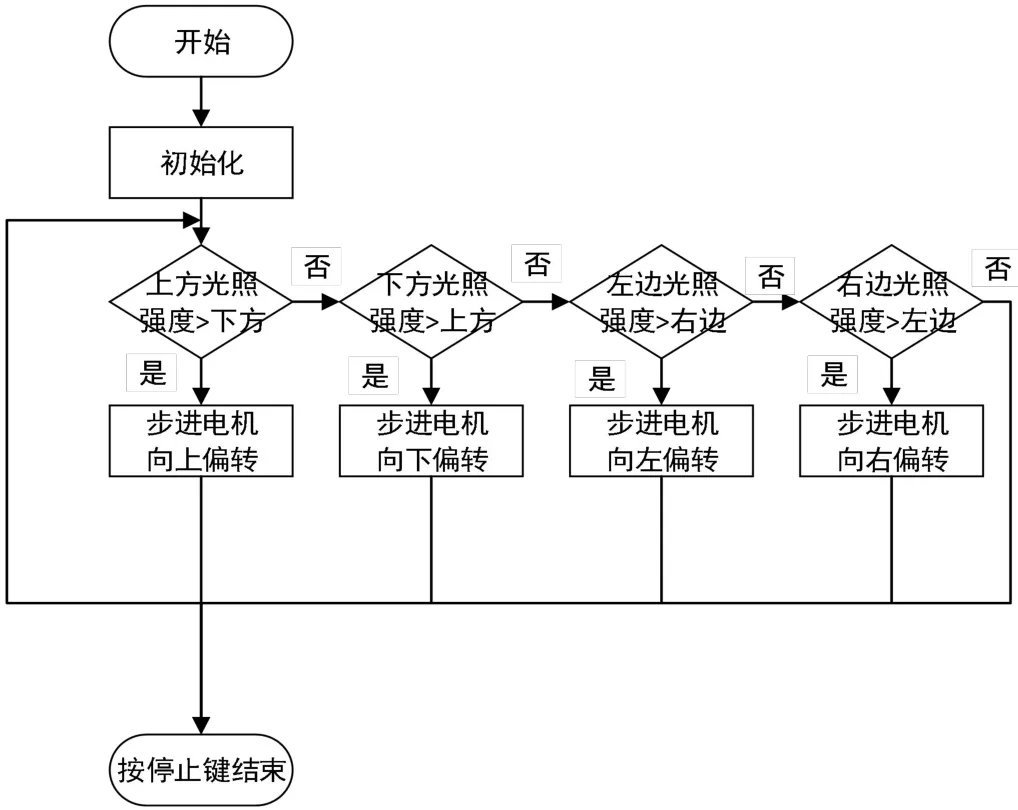
图4 主程序流程图
4 结束语
本光伏发电最大功率智能追光系统将太阳追踪技术、MPPT 干扰观察法结合到单片机设计当中,通过光敏电阻采集太阳光并对各个位置的光照强度进行判断,驱动步进电机移动光伏采集板,能够有效追踪太阳位置,提升光伏发电效率。
