基于虚拟振荡器与电压电流环控制的单相逆变器研究
2023-05-15肖响周书民汪志成
肖响 周书民 汪志成
(东华理工大学 江西省南昌市 330013)
煤、石油等不可再生能源的利用,会破坏生态环境且导致能源枯竭。太阳能、风能等可再生能源,由于其可以再生、不会污染环境等优点,得到了广泛的关注。向一些偏远地区输送电力十分困难且成本高昂,离网型光伏发电是最佳解决方案,因为与风力发电机相比,离网型光伏发电系统使用条件限制少,只要有太阳的地方就能安装使用[1]。光伏发电系统需要使用逆变器将直流电源变换成交流电源,逆变器的性能决定了光伏发电系统的供电质量,并且是系统稳定、高效运行的关键[2]。
VOC 控制器模拟弱非线性振荡器,将逆变器控制为非线性振荡电路,控制器输出在稳态时呈现近正弦振荡,是一种时域控制器,由于其不需要进行功率计算,只需要逆变器输出电流测量,具有更快的响应速度[3]。
当负载较大时,LC 滤波器容易出现谐振,滤波器电感增大和电容减小可抑制谐振,但电感的增大会造成相位变化和电压跌落,电容的减小会增大滤波器截止频率,影响滤波效果,增加输出谐波。LC 滤波器谐振会造成逆变器输出畸变,为提高电能质量和保护开关器件,在虚拟振荡器中添加电压电流环控制,其中电压环采用准谐振(QPR)控制,电流环采用(PI)控制。
1 单相逆变器结构
假设逆变器前级为稳定直流电源udc、元件都是理想元器件,单相逆变器拓扑结构如图1 所示,C1为直流侧滤波电容,逆变器主电路采用全桥结构,电感L1和电容C2构成LC 滤波器,R1为负载。
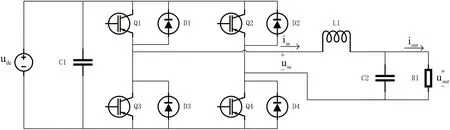
图1:单相逆变器拓扑结构图
根据单相逆变器拓扑结构图,利用基尔霍夫定律,建立系统数学模型如下:
对式(1)进行拉普拉斯变换转换到s 域,可得逆变电桥输出端到负载端的传递函数:
2 虚拟振荡器控制
虚拟振荡器控制利用数字控制模拟非线性振荡器,将逆变器控制为一个非线性振荡电路,是基于电路电流反馈的控制方法,不需要进行功率计算,具有响应快速的优点,虚拟振荡器控制逆变器示意图如图2 所示,虚线框内为虚拟振荡器控制模拟的电路图,需通过数字编程实现。其中Iosc 为电流控制电流源,Ig 为非线性电压控制电流源,Ki 为输入电流比例系数,Kv 为输出电压比例系数。
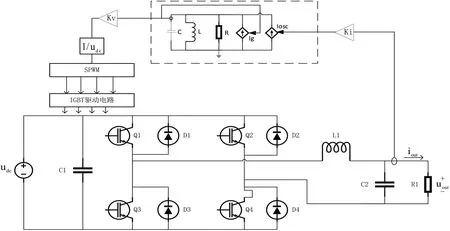
图2:虚拟振荡器控制逆变器示意图
控制器由RLC 振荡电路和非线性电压控制电流源组成[6],如图3(a)所示,由电阻、电感和电容构成RLC并联谐振电路,当通过RLC 并联的合成电流与电源电压同相时,将产生并联谐振,此时电感和电容的阻抗相同,从而得出谐振频率为:。在谐振时,并联LC 谐振电路的作用类似于开路,电路电流仅由电阻R确定。
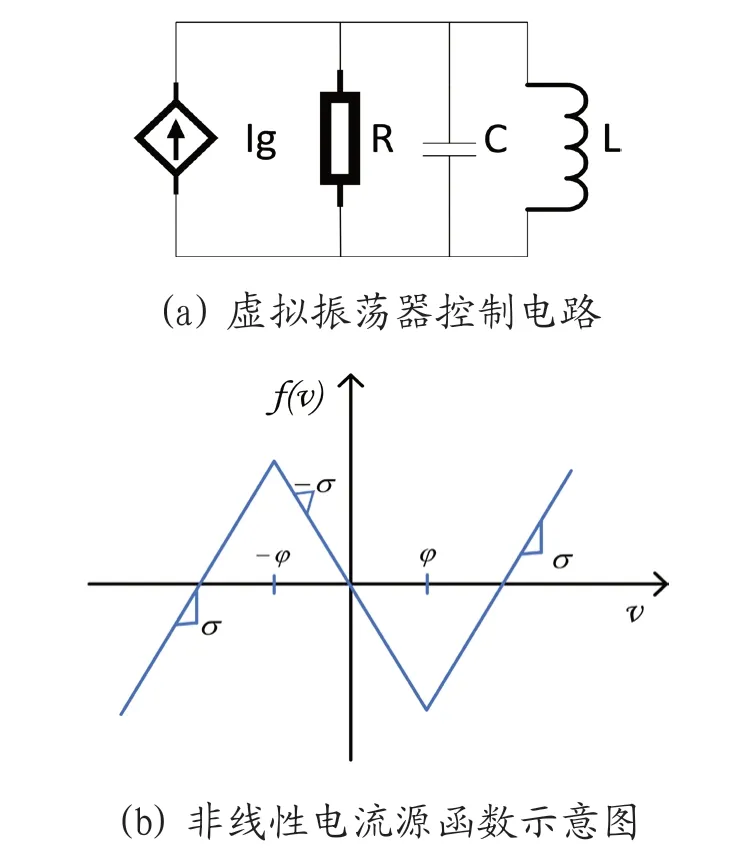
图3:虚拟振荡器控制及非线性电流源函数示意图
非线性电压控制电流源Ig 的函数如图3(b)所示,表达式为:
函数f(v)与横轴的交点±2φ 为分界点,在(2φ,+∞)和(-∞,-2φ)的区域函数输出电流f(v)和电压v成正比,即电压控制电流源函数起到电阻的作用;在(-2φ,2φ)区域内函数输出电流f(v)和电压v 成反比,即电压控制电流源函数起到电源的作用。在区域(-2φ,2φ)内,该电压控制电流源函数具有电压控制型负阻特性,与并联谐振回路相连接即可构成负阻振荡器。在负阻振荡器中,只要负阻能抵消回路中的正阻损耗,电路就能起振并持续振荡,即当时,该非线性振荡电路能起振。
综上,虚拟振荡器控制的原理为:由电感和电容谐振决定输出电压的频率,电压控制电流源函数控制振荡器的自激振荡和衰减振荡,使小信号增大,大信号衰减,从而将输出信号控制在一定的幅值和频率上。
3 电压电流环控制
电压电流环控制框图如图4 所示,其中,电流环用来控制电感电流,电压环用来控制电容电压。

图4:电压电流环控制框图
方框图化简得出电流内环控制系统闭环传递函数为:
电流电压双闭环控制系统传递函数为:
3.1 电流环控制
电流环的电流反馈分为电感电流反馈和电容电流反馈,电感电流反馈的抗扰能力和响应速度不如电容电流反馈,但电感电流反馈可以减小过流风险[8],为增强系统可靠性,选择电感电流反馈。
理想的PI 控制器传递函数为:
其中Kpi和Ki分别是比例增益和积分增益,将式(6)代入式(4)得到电流环控制系统闭环传递函数为:
采用控制变量法分析PI 控制参数对系统的影响,一个参数固定,另一个参数变化系统波特图如图5 所示,由图可知参数Ki 主要影响系统低频段,Kpi 主要影响系统高频段、谐振频率及谐振峰值。由图5 可知,未加PI控制系统最初增益为-29.5dB,加入PI 控制系统最初增益约为0dB,Kpi 越大,谐振峰值越小,可知加入PI 控制可以减小对低频段输入信号幅值的衰减,抑制LC 滤波器因负载过大导致的谐振,改善系统性能。
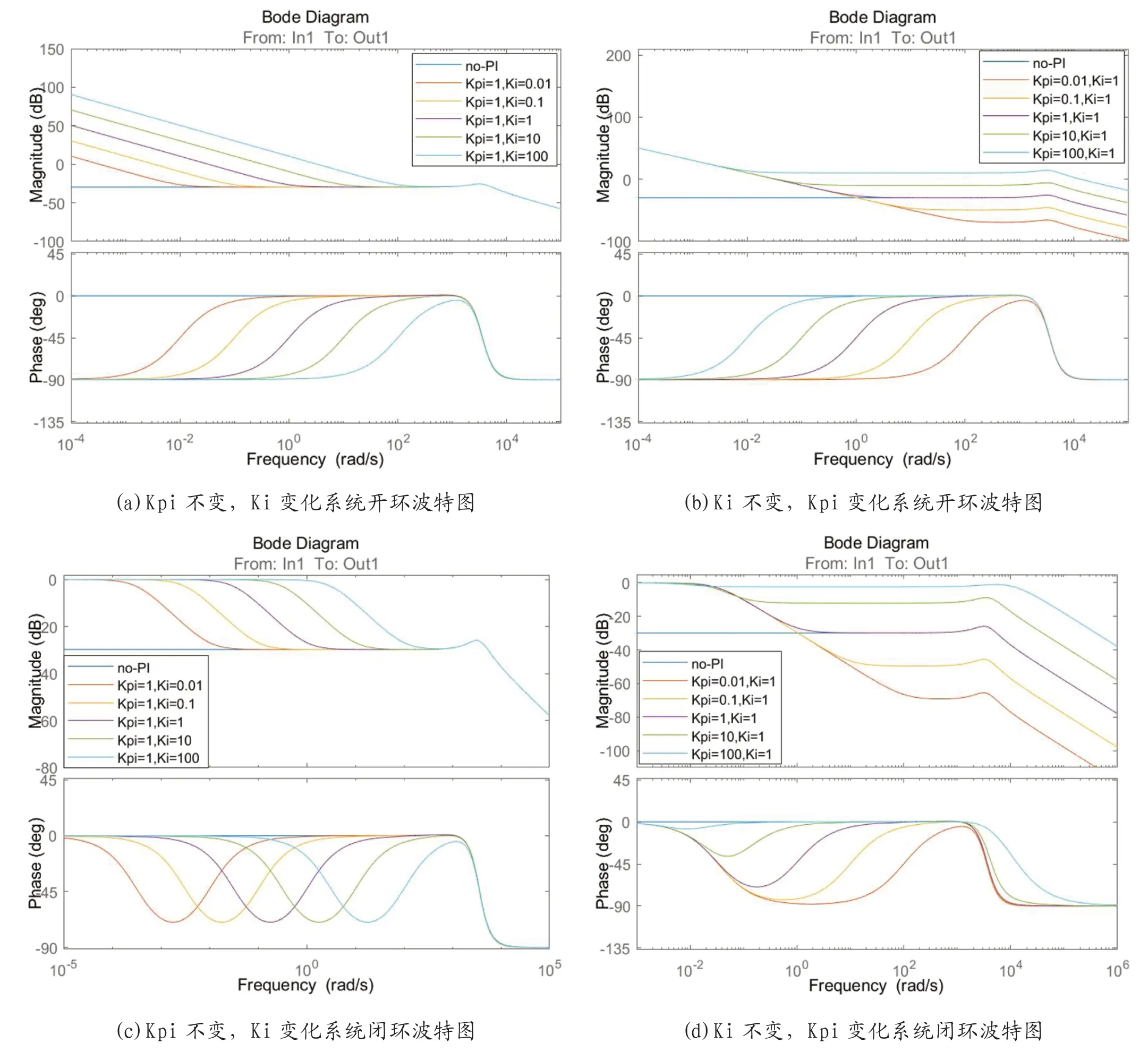
图5:不同PI 控制器参数值下系统波特图
3.2 电压环控制
准比例谐振(QPR)控制传递函数为[9]:
控制器参数为Kpr、Kr和ωc,为分析各个参数对控制器的影响,绘制一个参数改变,其他参数为1 情况下QPR 控制器波特图如图6 所示。
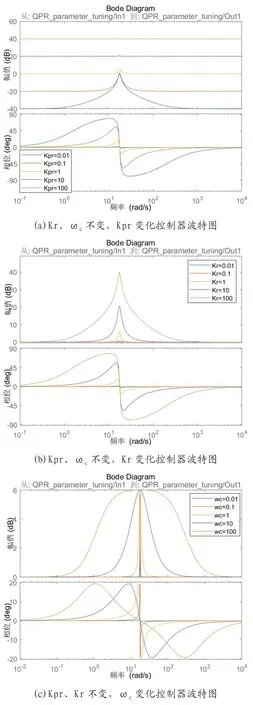
图6:仅改变一个参数情况下QPR 控制器波特图
由图6 可知,Kpr 影响控制器的各频段幅值以及带宽,Kpr 值越大,控制器低频幅值越大,稳态误差越小,跟踪效果越好,对低频扰动抑制能力越好,但高频段幅值也增大,对高频噪声的抑制能力变差;Kr 和ωc均影响控制器的带宽,Kr 和ωc越大,带宽越大,响应速度越快,但对噪声抑制能力越差,且ωc的影响更大。
4 仿真分析
根据单相逆变器拓扑结构图、虚拟振荡器控制图以及电压电流环控制框图,基于MATLAB/simulink 搭建单相逆变器仿真模型,仿真参数如表1 所示。
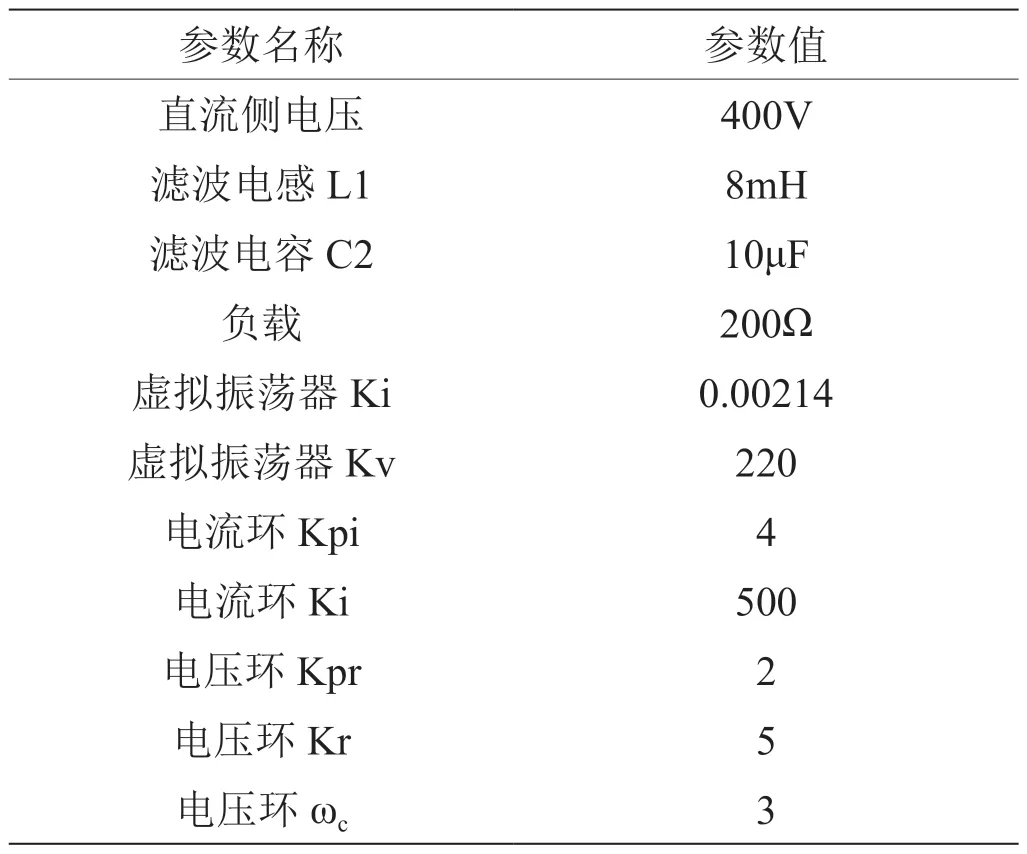
表1:仿真参数
对虚拟振荡器控制和虚拟振荡器加电压电流环控制下单相逆变器进行仿真实验,当负载较大造成LC 滤波器谐振时的仿真结果如图7 所示。由图7 可知,加入PI电流环和QPR 电压环可以改善LC 谐振情况下逆变器输出波形。
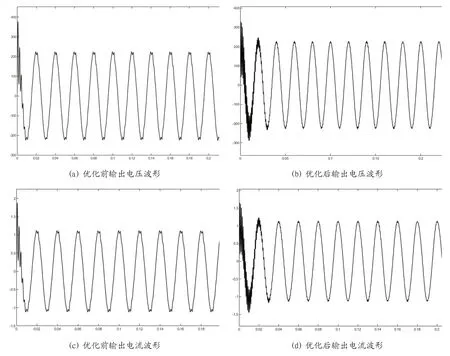
图7:电压电流仿真波形
分别对两种控制策略的输出波形进行谐波分析,分析结果如图8 所示。虚拟振荡器控制输出电压和电流THD 值为3.73%,而虚拟振荡器加电压电流环控制输出电压和电流THD 值为1.97%,可知,加入PI 电流环和QPR 电压环可以改善输出电能质量,抑制电压电流畸变,降低总谐波失真。
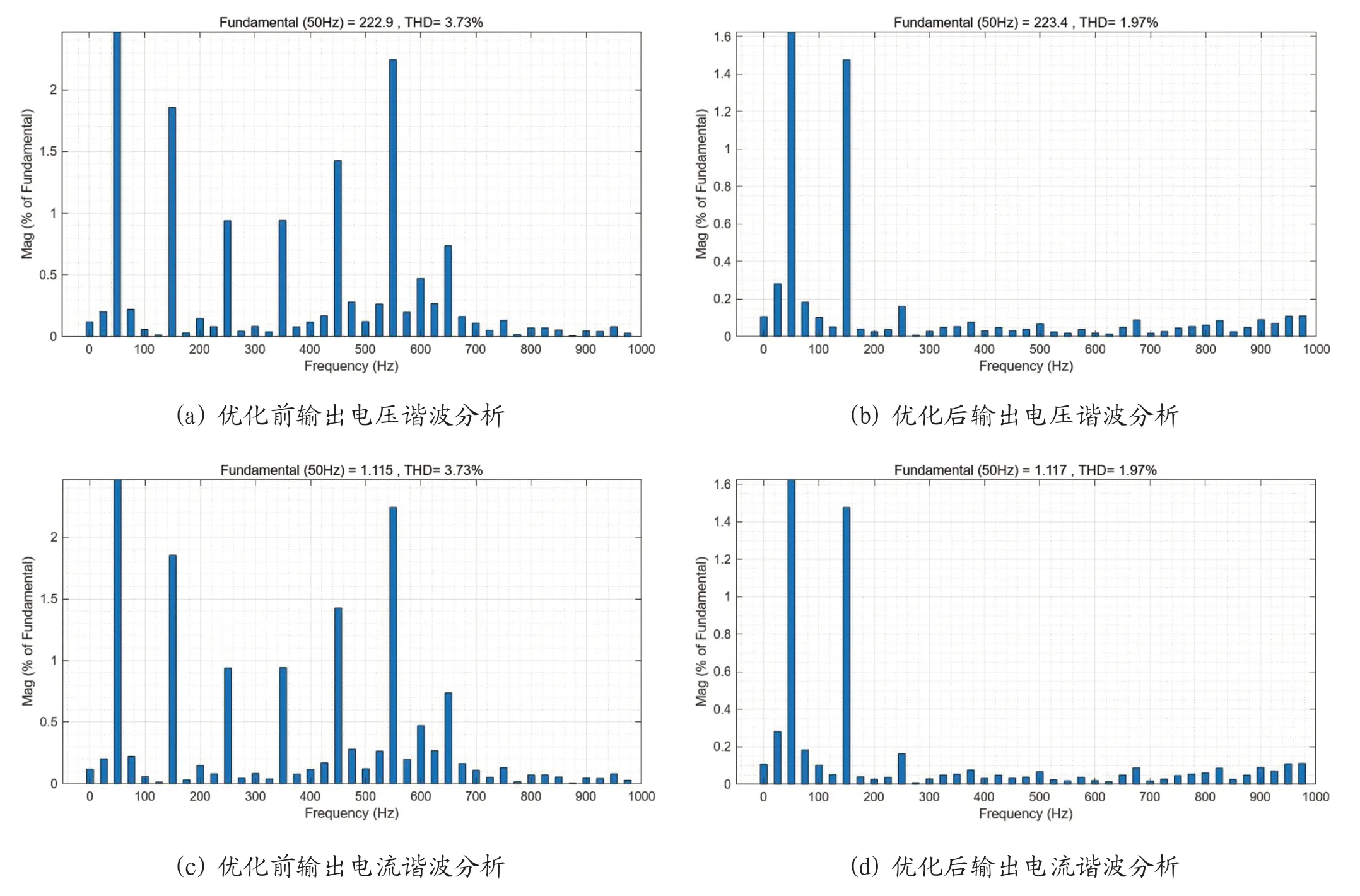
图8:电压电流谐波分析
4 结论
针对虚拟振荡器控制的单相逆变器在负载较大情况下,LC 滤波器易发生谐振,导致电能畸变的问题,本文将PI 电流环和QPR 电压环控制加入虚拟振荡器控制中,分析了PI 控制器参数对被控系统的影响和QPR 控制器参数对控制器的影响。仿真结果表明,加入PI 电流环和QPR 电压环可以抑制输出波形畸变,改善输出电能质量,降低总谐波失真。
