基于北斗及蓝牙的室内外无缝连续定位系统设计
2023-05-14宋海涛刘荣斌曹国兴
宋海涛 刘荣斌 曹国兴
摘要:在航空物流领域,主要采用航空容器集装设备及无动力装置车辆(拖斗车)进行货物航空运输及地面流行性运输,其在货站内及机场之间进行转运。在室外,可以采用卫星定位的方式对其位置进行监控,但在货站内无法获取其卫星定位位置,因此设计了一种基于北斗及蓝牙到达角(AOA)技术的高精度定位方式,实现了室内外无缝连续定位系统。该系统的建设通过科技创新的技术手段提高航空货运物流领域面临的货物流动性无法确认的相关难题,以室内外位置定位为引领,以服务于业务场景为系统根本,极大地提高了航空货物运输领域的生产效率。
关键词:室内外定位;高精度;北斗;蓝牙到达角
中图分类号:P228文献标志码:A文章编号:1008-1739(2023)06-48-5
0引言
目前在国际航空物流领域,主要采用航空容器集装设备及相关无动力装置车辆进行货物航空运输及地面流动性运输。在国际航空运输方面,航空容器集装设备具备全球流动性特点,维护管理以及监控监管极其不易,在各航空公司之间亦有拆借情况,在管控中难免出现疏漏。尤其是当国际航线航空容器集装设备下飞机后直接被装入卡车运输到其他地方时,其位置更无法得到有效管控,导致航空容器丢失事件时常发生,因此对其位置信息的管控迫在眉睫。在地面运输方面,货物通过拖斗车进行飞机与货站之间的转运,货站与室内货仓之间也需要进行相关货物的流动转运。相关操作人员急需了解哪些无动力设备可以使用、在什么位置、是否可以就近寻找到相关设备等信息。同时,在货物处理上也需实时了解装载货物的这些航空容器及无动力装置都放置在什么位置便于随后开展分拣、拼装等货物作业。通过对航空容器及无动力装置的位置定位,快速查找及使用相关设施,并在全流程业务系统基础上完成货物与容器的绑定,快速获知货物的位置信息,方便各运输环节对货物的后续处理。
基于北斗及蓝牙到达角(AOA)技术的高精度室内外无缝连续定位系统通过差分定位以及蓝牙AOA技术[1-3],实现了室内外无缝连续亚米级的定位精度,该系统的建设旨在通过北斗卫星系统融合蓝牙AOA的室内定位技术,打造基于航空货运物流业务场景需求下的室内外一体化混合定位系统。
1系统组成
系统由物联全球容器管控平台、北斗超长待机定位终端、基于蓝牙AOA技术的室内定位基站、高精度定位基准站、航空容器集装设备及无动力装置(货运拖斗车)五部分组成,如图1所示。
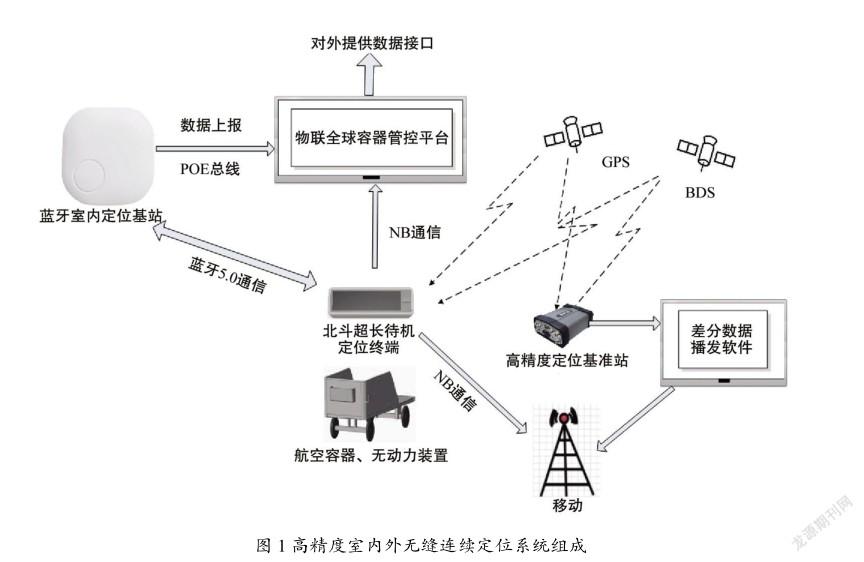
物联全球容器管控平台:完成终端数据接入与协议解析、数据存储;完成室内定位数据解析与处理;平台通过自研室内外定位算法,实现终端室内外状态的判断;完成室内外地图整合,实现一张图展示室内外全部位置;对外提供数据接口,可对接相关机場业务流程。
北斗超长待机定位终端:通过检测运动、静止状态触发北斗定位功能或蓝牙AOA室内定位标签功能;通过NB-IOT网络将位置信息数据上报应用服务平台。
基于蓝牙AOA技术的室内定位基站:基于信号AOA的定位算法,通过硬件设备感知发射节点信号的到达方向,计算接收节点和锚节点之间的相对方位和角度,利用三角测量法等方式计算出未知节点的位置。蓝牙AOA定位基站通过POE接口将采集到终端信息发送给平台[4]。
高精度定位基准站:部署在系统需要室外定位的区域,用于获取区域差分定位数据,并将差分定位数据通过NB-IOT网络播发给终端,使终端在室外实现高精度定位。
航空容器及无动力装置(拖斗车):用于装载机场、航空货运公司日常物流货物,也是本系统中需要定位的设备。
2系统设计
2.1系统工作原理
航空容器及无动力装置(拖斗车)安装北斗超长待机定位终端。在需要定位的区域建设一套差分基准站系统,实时接收卫星信号,计算出该区域定位信号误差的修正数,并将修正数通过NB-IOT网络播发给需要室外定位的终端,终端通过定位模块最终计算出室外高精度位置[5]。
在货站、仓库等室内区域布设基于蓝牙AOA技术的室内定位基站,蓝牙信号AOA技术是终端蓝牙通过单一天线发射寻向信号,而作为接收端的定位基站内建天线阵列,当信号通过时,会因阵列中接收到的不同距离、产生相位差异的信号,进而计算出相对的信号方向,定位基站通过POE总线将信号波达方向传输至后台,并依据定位算法实现室内位置解算。
物联全球容器管控平台实现了蓝牙AOA室内定位数据、终端定位数据及状态信息数据接入与协议解析、数据存储、数据处理。平台依据室内定位数据及终端依据加速度计等传感器上报的运动状态信息等综合判定算法,实现终端室内外状态的判断。
北斗超长待机定位终端长期休眠,直到监测到车辆从运动变为静止后才会唤醒工作。终端唤醒后首先与平台交互获取室内外状态通知,如果车辆处于货站等室内时会开启蓝牙,配合室内定位基站完成室内定位;如果车辆处于停机坪等室外时会开启北斗定位。终端通过NB-IOT网络将相关设备信息及位置信息上报平台,完成定位。
2.2室内外无缝连续定位工作原理
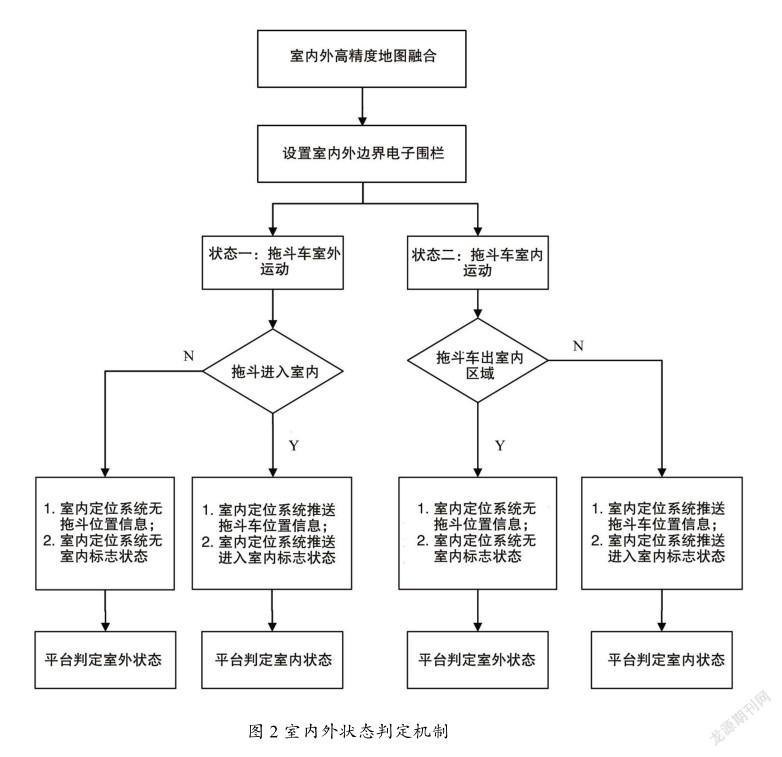
通过地图融合方法,将室内测绘地图与室外高精度地图进行融合叠加,形成室内外融合高精度地图,并通过测绘方式获取室内叠层边界高精度经纬度信息。平台通过绘制的室内外边界信息,划分出室内室外状态标识区域。对于判断室内室外的存在状态,需要依据终端目前所处区域进行二分类状态判定。状态一:终端由室外向室内移动,此时如果已经进入室内,则室内定位系统会收到根据蓝牙信号判定的室内位置,室内定位系统推送已进入室内标识状态,平台判定为室内状态;如果此时没有进入室内,室内定位系统无法收到蓝牙信号,则判定为没有进入室内,无法触发室内标识状态,则平台判定为室外状态。状态二:终端由室内向室外移动,如果此时终端已经在室外,则室内定位系统判定出区域标识状态,平台此时判定终端为室外状态;如果此时终端未出室内区域,则室内定位系统推送终端位置,触发室内标识状态,平台此时判定为室内状态。通过室内定位系统、物联容器管控平台以及终端的工作机制3个关联信息,可以判定终端目前处于室内外的状态,从而达到室内外无缝连续定位[6]。
室内外状态判定机制如图2所示。
2.3终端设计
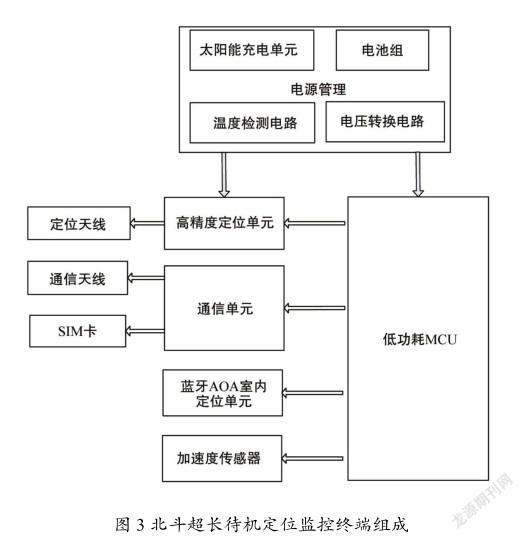
北斗超长待机定位监控终端由通信单元、定位单元、低功耗MCU、加速度传感器、蓝牙单元和电源管理单元等部分组成。低功耗MCU在满足功能需求的同时选用国产芯片。加速度计用来监测终端运动状态来触发或唤醒设备进入/退出低功耗模式。蓝牙单元用来支持蓝牙AOA室内定位。电池单元选用大容量、宽温、高可靠性电池组满足长周期免维护的需求,具体组成框图如图3所示。
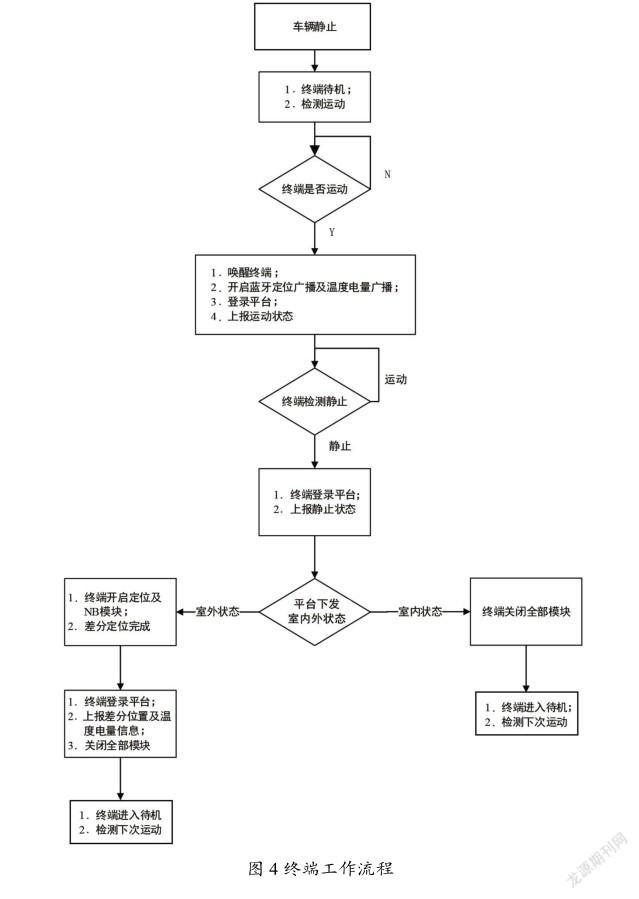
终端工作机制为:终端开始处于静止待机状态,加速度传感器循环检测,当侦测到终端处于运动状态后,触发MCU中断,MCU开启蓝牙定位广播及温度、电量广播,终端开启通信模块,登录到物联容器管控平台上,同时上报运动状态。上报完成后,MCU持续监测加速度传感器状态,如果在120 s内无相关状态中断MCU,则终端登录平台,上报此时状态为静止状态。平台通过室内外状态标志,判断此时为室内状态还是室外状态。如果此时为室内状态,则终端关闭全部模块,再次进入待机状态,室内定位信息通过后台解算出蓝牙的具体位置,并通过经纬度转化,定位到相关位置;如果此时判断为室外状态,则终端开启定位模块,并连接差分基准站,获取差分信息,通过定位模块解算,获取高精度位置信息,通过通信模块,将定位信息及温度、电量信息上传到平台。此后,MCU关闭除加速度传感器以外的其他全部模块,自身进入低功耗模式,此时终端再次进入待机状态,直至下次运动状态检测,终端完成全部状态转换[7]。终端工作流程如图4所示。
3系统应用
本系统实现了某航空货运物流公司国内货站、国际货站、代理仓以及机场范围的室内外无缝连续定位的应用示范项目工作,主要完成了与对方系统的数据接入,机场地图、国内货站和国际货站室内地图接入,实现了室内及室外地图的融合展示,室内外高精度位置数据接入、无动力装置及容器信息展示、围栏设置、容器参数设置、维修流程、保养流程、租赁流程等业务流程;实现了无动力装置全生命周期业务流程的线上管理功能。
在国内货站13个冷库、国际货站室内区域、代理仓、国际货站5个冷库完成了室内定位基站安装,其中蓝牙AOA室内定位基站如图5所示。

通过安装货运3 150辆拖斗车定位监控终端,完成了货运差分基准站建设。实现了货站内拖斗车高精度亚米级室内外定位、拖斗车监管以及拖斗车全业务流程管理,提高了拖斗车的管理工作,其中北斗超长待机定位监控终端如图6所示。
由物联全球容器管控平台、北斗超长待机定位终端、基于蓝牙AOA技术的室内定位基站、高精度定位基准站、航空容器集装设备及无动力装置形成的一套完善的亚米级高精度室内外无缝定位管理系统,可为机场、货运站等提供一整套完善的无动力容器管控系统,产生了良好的科技效益和社会效益。
4结束语
通过采用北斗高精度差分定位及蓝牙AOA的室内定位技术,有效弥补了蓝牙AOA定位范围较小、北斗定位易受遮挡等不同系统的缺陷,实现了航空物流货物等设备室内外定位的无缝切换,并在相关货站区域内不受周围环境的影响均能实现定位精度小于1 m。通过科技创新的技术手段提高航空货运物流领域面临的货物流动性无法确认的相关难题,以室内外位置定位为引领,以服务于业务场景为系统根本,极大地提高了航空货物运输领域的生产效率。
参考文献
[1]贾灵,王薪宇,胡海,等.一种融合RSSI和AOA定位算法的智能蓝牙防丢器[J].单片机与嵌入式系统应用,2021,21(7): 63-66.
[2]陈鑫,郭杭,余敏,等.基于多重信号分类改进算法的蓝牙AOA高精度室内定位[C]//卫星导航定位技术文集(2021).郑州:测绘出版社,2021:32-37.
[3]祁星,姌董,段萌.面向工業室内定位的蓝牙AOA与UWB混合组网方案[C]// 5G网络创新研讨会(2022)论文集.北京:[出版者不详],2022:264-270.
[4]裘有斌,陈广香,吴迪,等.蓝牙AOA高精度定位技术白皮书[EB/OL].[2022-10-30]. https://www.iotku.com/News/ 542422779517992960.html.
[5]庄皓,原彬,张睿.基于北斗卫星导航系统的差分定位技术性能分析[J].现代导航,2018,9(3):172-176.
[6]曾小江,江建华.高精度室内外无缝定位与导航方法浅析[J].江西测绘,2017(3):52-53.
[7]郭凯旋,卢彦霖,冯涛,等.基于智能切换算法的室内外无缝定位技术研究[J].传感器与微系统,2018,37(7):49-51.