动车组不落轮镟修作业自动对位系统可行性应用分析
2023-05-13黄建欣
黄建欣
(广东深莞惠城际铁路运营有限公司,广东深圳 518026)
0 引言
动车组实行走行公里周期为主、时间周期为辅的计划预防修,其中轮对镟修作业按照每运行20~25 万公里开展,以保证车轮和轨面接触性能,确保列车行驶平稳性。轮对镟修时动车组需由带电区域牵引至无高压电的镟修库,辅助作业人员利用公铁两用车为动车组提供动力,并驱动动车组将需镟修的车轮移动到镟床相应位置,实现轮对对位。在现场实操中轮对对位耗人、耗时、效率低,随着近年高铁配有量增长,相应的动车组镟修任务日益繁重,利用动车组不落轮镟修作业自动对位系统,可减少人员投入、缩短镟修综合用时,达到提升镟修效率目的。
1 系统组成
系统主要通过在既有公铁两用车上增设远程监控设备,采用雷达定位、摄像采集、数据分析等技术,实现动车组轮对镟修作业自动对位,具体系统组成如图1所示。
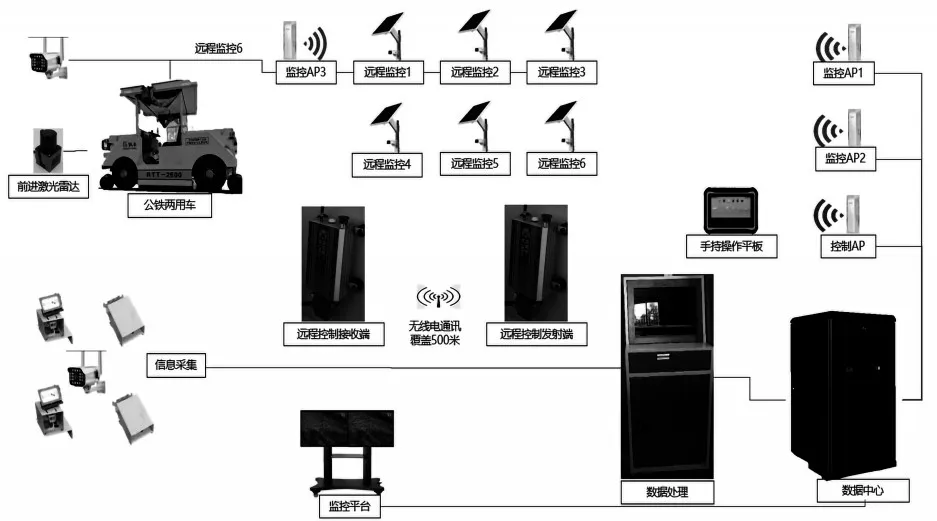
图1 系统组成
1.1 数据采集
系统拥有丰富的数据采集模块,可根据需求采集数据,为对位算法提供数据支撑。具有动车组车型、车号采集模块、粗对位采集模块、精对位采集模块等功能。
1.2 数据中心
数据中心用于存储采集的所有数据及进行数据运算,可按动车组车型、车号,自动分析计算镟修轮对位置,每次作业完成后可根据车组号及日期进行归档,形成轮对镟修数据信息库,便于后期轮对镟修数据的统计、分析和查阅。
1.3 数据处理执行器
系统通过对应接口调用数据中心的数据,经过数据处理器运算,并将得出结果发送至执行器。执行器根据算法结果调用公铁两用车控制指令,驱动公铁两用车以5km/h 的速度行驶,并在到达既定镟修轮对位置后自动停止,实现自动对位控制。
1.4 监控中心
监控中心通过监控平台查询各关键监控点的实时动态信息。在执行镟修轮对对位时,可通过监控平台查看关键监控点的实时状态,对公铁两用车行走过程周围环境进行监控,在发现危及行车安全问题时可远程快速停止车组行走,实现实时有效、多点防护的功能。
1.5 安全防护模块
系统采用关键监控点防护、异物遮挡保护、移动区域保护、脱轨保护、硬性超限保护、物理隔离保护、超时保护、数据验证保护、心跳保护等多道安全防护,可有效确保系统安全性。
2 系统主要功能
2.1 自动对位
首先,在现有的公铁两用车上安装远程控制模块,获取公铁两用车控制权。其次,在镟轮机床安装粗对位采集模块、精对位采集模块及车厢信息采集模块,用于数据采集。最后,在操作台选择“南向对位”或“北向对位”按钮以实现正向或逆向的转向架或轮对自定义对位,满足动车组全列轮对镟修或单个轮对故障镟修的需求。
2.2 实时场景监控
公铁两用车和动车组对位经过的区域均设置监控摄像头,拟定为安全防护区。摄像头的监控图像可实时回传数据中心,数据中心通过监控展示平台同步显示各监控关键点动态信息。轮对镟轮作业人员在操作自动对位时,可查看各个关键监控点的实时动态。当发现异常情况时,可通过操作台或急停按钮快速控制公铁两用车停止运行。为避免动车组牵引时人员突然闯入,摄像头监控数据具备预警分析功能,一旦发生人员入侵可实现自动停车[1]。
2.3 激光雷达防护
在公铁两用车车头安装激光雷达,激光雷达可采集前方5m 内的数据信息,拟定为公铁两用车前行保护区。当发现保护区域被遮挡,系统判断前方存在人为侵入或存在异物情况,将自动切断公铁两用车移动信号源,并将危险信号转发至控制台。控制台收到危险信号后,立即切断公铁两用车控制源,此时公铁两用车将停止运行,操作人员需通过监控屏确认或现场处理后,方可手动恢复公铁两用车行走。
2.4 语音播报警示
通过安装高分贝的语音播报器,当公铁两用车移动行走时,语音播报器开始警示,提醒人员注意安全。当对位牵引系统未被启动,操作人员可在启动前通过监控平台查看保护区情况,发现人员进入时,可语音播报提醒人员离开,保证牵引系统启动前的风险。
2.5 无线网络及控制
无线网络和无线控制采用不同种类的网络方式,实现物理层隔离效果。监控视频通过有线及无线两种方式向数据中心回传数据流。近距离传输使用交换机进行数据交互,远距离传输通过网桥传播,可节省布线成本,降低故障率的发生。无线网络具有自动诊断功能,当与监控中心无法连通时,将自动重启。为保证安全控制,公铁两用车远程控制采用专用无线传输协议,可防止外来用户通过无线信号侵入系统。在控制信息交互上采用逻辑交互锁,错误的交互逻辑指令会触发入侵保护程序,系统将强制锁定控制源的有效性,提升防护等级。
2.6 全过程信息存档
采用信息化控制系统,将行车视频、操作员操作日志、设备动作日志、采集数据等信息进行归类存档,形成方便查阅的后台数据。后台数据可根据车型、车号、日期等索引,为数据分析便利化提供保障。
3 系统作业流程
3.1 系统获取公铁两用车控制权
开工前,公铁两用车操作员与镟轮作业人员办理钥匙和录音笔交接,填写交接记录。当公铁两用车钥匙拔出后并插入系统时,自动对位系统方可获取公铁两用车的控制权限。
3.2 远程信号控制
动车组检修作业时,需在来车方向的右侧设置信号指示灯,特别在轮对镟修作业过程中,频繁的对位需作业人员前后行走,进行关闭和开启信号指示灯,单次行走(往返)最长约400m,作业既耗时又耗人。在已安装自动对位系统的轮对镟修轨道,将采取固定式信号灯管理,牵引对位时,镟轮作业员可通过系统远程关闭固定式信号灯;反之,牵引对位完成后,可通过系统远程开启固定式信号灯,实现整车镟轮作业期间,无需人员来回行走设置信号,提高作业效率。
3.3 系统登录
镟轮作业人员凭个人账号和密码登录系统客户端,系统账户一人一号,作业过程全过程记录。
3.4 远程联防
镟轮作业人员操作公铁两用车前,通过视频监控确认股道两侧无异物、前后方无阻挡。
3.5 对位系统与镟修机床的互锁
镟轮作业人员启动智能对位系统前,应确认镟轮库股道指示灯状态,指示灯为绿灯时,表示镟轮机床各项准备工作到位,动车组可以移动入库;指示灯为红灯时,禁止操作智能对位系统。同时,智能对位系统已实现与镟轮机信号灯的互锁功能,当镟轮机信号灯为红灯时,开启对位操作无效。
3.6 执行自动对位
镟轮作业人员负责操作智能对位系统对位,在操作界面输入车号,点击“南向对位”或“北向对位”开启对位操作,并全程盯控监控中心各关键防控点的实时状态,此时公铁两用车将自动行驶对位。
3.7 退出登录
对位完毕后,镟轮作业人员退出智能对位系统软件操作界面,拔出权限钥匙退出控制权。每次重新登录对位操作系统时,均须重新登录账号和密码,以及插入权限钥匙获取控制权限。
3.8 关闭信号灯
全列动车组镟修计划任务完成后,镟轮作业人员遥控关闭信号灯,退出智能对位系统,关闭控制主机,镟轮作业任务完成。
3.9 任务完成
公铁两用车操作员和镟轮作业人员办理钥匙和录音笔交接并登记后,操作员再将动车组推送至指定位置后解编、下道作业,完成镟轮任务。
4 系统控制原理
4.1 系统启动
点击自动对位按钮,系统先检测设备启动条件,如机床互锁信号、激光雷达信号、权限获取信号、安全回路信号等是否满足条件;当启动条件满足时系统将会初始化,当启动条件不满足时,启动命令将被禁止,提示不被启动的原因。
4.2 系统初始化
系统启动阶段,将对视觉相机、采集传感器、缓存数据等进行数据初始化,并对各软件进行通信诊断,确认正常则自动进入高速(5km/h)粗对位阶段。
4.3 高速粗对位
进入高速粗对位阶段意味着系统已经判别系统硬件及软件均正常,届时系统关闭信号灯,同时打开语音播报提示,并长鸣10s 公铁两用车喇叭后进入高速移动环节。系统控制公铁两用车高速移动的同时,开启高速粗采集模块的数据采集,将采集回来的数据同步到算法服务器进行位置判别,当初步判别为目标位置时,系统将自动跳转到低速(1km/h)精准对位阶段。
4.4 低速精准对位
进入低速精准对位阶段后,系统会自动开启低速精准采集模块。因系统降低了动车组移动速度,精准采集模块可以采集到清晰的数据图片,并通过算法服务器实时的将图像信息转换为位置信息发送给控制器。当位置信息满足对位预设值范围内,控制器将启用中断命令停止公铁两用车的控制,完成轮对对位。
4.5 解除安全防护
系统对位准确后会自动记录数据,并停止语音播报、同时打开信号指示灯、然后退出公铁两用车控制权。此时自动对位的镟修库解除安全防护。
5 智能对位系统与人工对位的优势
5.1 对位人员
人工:动车组每担轮对镟修时均需对位后再进行镟修,每次对位作业需要4 人协作完成,全列轮对镟修时,频繁调车时间较长;
智能对位系统:每次对位仅需要1 人完成,较之前减少3 名。
5.2 对位环境
人工:室外盯控,人员受炎热气候、雨雪等恶劣天气影响;
智能对位系统:室内作业,不受天气变化影响,减少风险。
5.3 对位时间
人工:作业前的岗位沟通、准备、上下信号灯,一次对位耗时约30min。
智能对位系统:可一键启动对位、远程上下信号指示灯,一次对位仅需3min。特别在动车组全列轮对镟修时,作业时间由原来的2d 缩短至1d 完成,减少了50%的时间。
5.4 对位安全
人工:盯控局限在车尾及车头,需使用对讲机沟通实时场景信息,存在沟通不畅、信息延缓等问题。
智能对位系统:可同步盯控多个重要防护点的实时动态,盯控和实操均为同一人,减少沟通环节。
5.5 对位数据管理
人工:人工录入或书写记录。
智能对位系统:系统自动记录并存档,后期可查可用。
6 系统实际使用效果
自动对位系统研发完成后,在广州动车段广州南动车运用所现场试用,效果反应良好:第一,减少作业人员数量。第二,降低作业人员劳动强度。第三,多方位实时监控,确保控制安全。第四,数据信息化,全程记录,具有可追溯性。第五,缩短作业时间,提高效率。第六,利用既有公铁两用车改造,减少成本投入。试用该系统后,投入成本小,减少作业人员,简化作业流程,大幅度提升了镟修作业工作效率[2]。
7 结语
通过改造现有公铁两用车设备和优化作业流程,利用视觉传感器“替代”人的眼睛,识别定位算法“替代”人的大脑分析,通过实时远程监控及报警系统建立安全防护网,通过自动牵引和制动系统实现无人驾驶。系统将各个新“组织”完美结合成新的智能对位系统,智能对位系统在人力、时间、效率上都取得了显著的成绩。同时,该设计也适用于轨道机车的对位或指定区域的有限控制,应用范围可扩展为高铁、普客、地铁、有轨电车等轨道机车。
