某双体客船阻力特性数值仿真分析
2023-05-13石晓川李春阳孙光晓仉永超张祥王玉帅
石晓川,李春阳,孙光晓,仉永超,张祥,王玉帅
1.潍柴动力股份有限公司,山东 潍坊 261061;2.潍柴重机股份有限公司,山东 潍坊,261108
0 引言
双体客船具有较好的稳定性和操作灵活性,在对抗恶劣海况时表现优异,得到广泛应用。船舶阻力是衡量船舶性能的重要指标之一,阻力不仅影响船舶的速度,同时也与船舶的使用性和经济性相关[1]。船舶在定速巡航工况下,主机的输出功率主要用于抵抗航行中产生的阻力,因此,船舶阻力的预测有利于船主机的选型匹配,如何更加快速准确地预测船体阻力成为船舶设计过程中的关键。
船舶阻力预测的研究方法主要有理论研究、试验研究和数值模拟。近年来,随着计算机算力的提升,计算流体动力学(computational fluid dynamics,CFD)成为预测阻力的热门手段[2-3]。赵丙乾等[4]使用CFD软件计算了双艉客船在静水中的航行阻力,发现使用软件对船体阻力特性的预测具有快速性和高精度的优点,在计算范围内船舶总阻力的仿真与试验结果的相对误差在3%以内;Wang等[5]结合试验研究和数值模拟的方法分析了高速平面双体船在不同工况下的阻力,发现在高速工况下SSTk-ω湍流模型更接近试验结果;文献[6-7]对不同工况下的船舶阻力使用SSTk-ω湍流模型进行仿真,所得到的结果具备参考价值。仿真模型的不断优化使得计算结果的精度得到了进一步提高。
RANS法将流体的控制方程时均化处理,解决了流体在湍流工况下在时间与空间上的随机性。文献[8-10]通过RANS法结合数值模拟方法对三维船体阻力进行预测,发现仿真获得的自由面兴波趋势与试验得到的结果趋势相同,具有较好的实际应用价值。
本文中使用STAR-CCM+软件,基于RANS法预测双体船阻力,采用二因次换算法将船模阻力换算至实船阻力,并根据阻力预测结果对船主机进行选型匹配。
1 数学模型
1.1 控制方程
将海水视为不可压缩黏性流体,其连续性方程为:
(1)
式中: ▽为哈密顿算子,ux、uy、uz分别为x、y、z方向上的流体的平均速度,m/s。
流体的动量守恒方程为:
(2)
式中:ρ为流体密度,kg/m3;t为时间,s;p为微元流体压力,Pa;ν为流体运动黏度,m2/s;fi为微元流体单位质量力,m/s2;下标i、j分别代表笛卡尔坐标系横坐标与纵坐标的方向。
对于任何形式的流体流动,均符合Navier-Stokes方程(N-S方程),但随着雷诺数增大,流动由层流转变为湍流,过度流动使得N-S方程的初值与边值问题产生分歧解。为解决该问题,目前常采用时间平均法对方程进行处理,即:
(3)

将式(3)分别带入到式(1)(2)中可以得到RANS方程[11]
(4)
(5)

1.2 自由表面数值模型
船体在水面上航行,需要考虑气-液两相面对船舶前进阻力的影响[12]。自由面捕捉算法是将液相和气相同时计算,具有较好适用性和灵活性,对于破碎波等自由液面具有更好的模拟效果。
单一流体的物性参数由构成函数ci决定:
(6)
式中:V为微元体积,m3;A为微元表面积,m2;ud为微元表面法向矢量上的速度,m/s;n为法向矢量。计算过程中,气相中ci=0,液相中ci=1。
2 物理模型
某双体客船的长度为33.4 m,垂线间长30.9 m。将双体船的实船尺寸与模型尺寸按10:1缩小进行静水场航行阻力计算,实船与模型的主要参数如表1所示。

表1 双体船主要参数
根据重力相似准则,实船与模型的2个流动系统重力必然相似,其弗劳德数相等。弗劳德数[13]
(7)
式中:v为特征速度,m/s;g为自由落体加速度,m/s2;L为船舶特征长度,m。
根据式(7)计算得到不同航速工况下的实船与模型的速度转换结果如表2所示。

表2 实船与模型的速度转换结果
使用计算流体力学软件STAR-CCM+和SSTk-ω湍流模型进行仿真计算,模拟航速为26~32 kn。双体船三维模型如图1所示,计算时未考虑附体对船体的影响。

a)主视图 b)左视图
采用RANS法结合SSTk-ω湍流模型对虚拟绕流场进行求解,计算域采用长方体形状,计算域的设置示意如图2所示。由于船体及流动具有对称性,所以以半船为计算对象,边界计算定义如下:船前为船艏前1.5LPP处,速度入口;船后为船艉后5LPP处,压力出口;船侧为中线面侧方2LPP处,速度入口;船舯为船体中线面的延展面,对称平面;顶部为设计水线以上LPP处,速度入口;底部为设计水线以下2LPP处,速度入口。
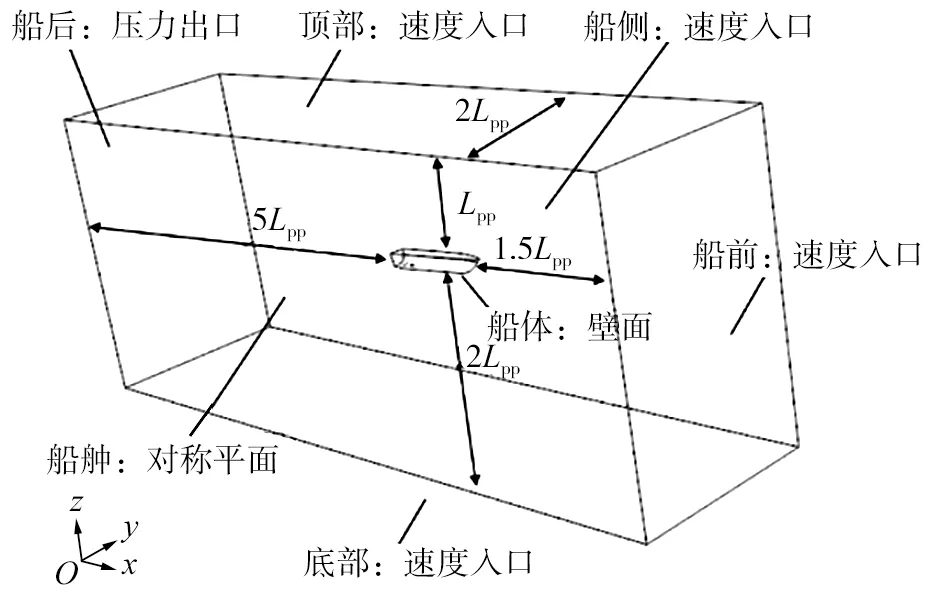
图2 计算域与边界条件的设置示意图
计算域采用切割六面体网格,船体附近六面体网格的密度进行加密处理,在静水面附近采用开尔文波形形状的密度盒进行加密,计算域内网格总数为220万左右。计算域网格如图3所示。

a)计算域内网格 b)局部网格加密
3 模型验证和结果分析
3.1 模型验证
在进行模型数值模拟之前,需要预先检验湍流模型对于双体船阻力计算的准确性。本文中参考文献[14]进行湍流模型验证,文献[14]中使用船舶模型为双体船,湍流模型使用修正Realizablek-ε模型。共选取7种航速工况结果进行对比,对比结果如表3所示。由表3可知:通过SSTk-ω模型模拟得到的结果相对误差较小,相对误差绝对值最大为5.9%,模拟误差在可接受范围内,SSTk-ω模型以及CFD软件计算船舶阻力可靠。
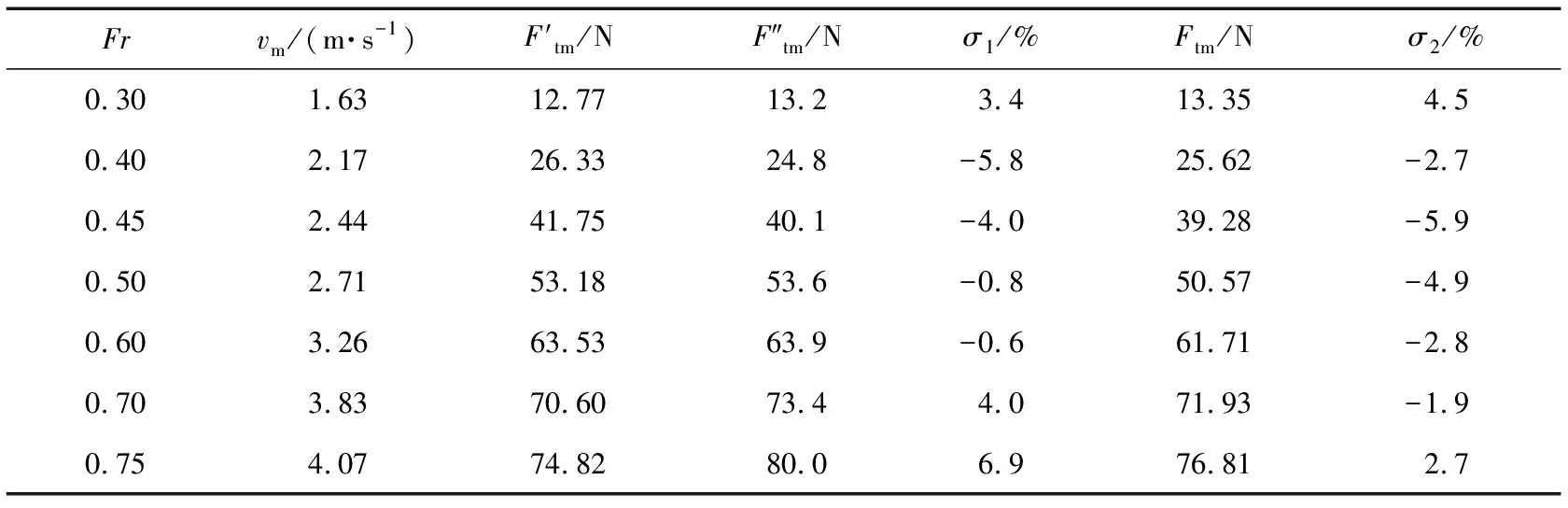
表3 不同湍流模型下总阻力计算结果与试验数据对比
3.2 结果与讨论
使用STAR-CCM+对双体客船进行不同航速下的静水阻力仿真计算,航速为26~32 kn,该船在此航速阶段航行时,船体姿态变化明显。自由面的波形体现出船体的兴波特性,数值计算收敛后,监测到的自由面波形如图4、5所示。
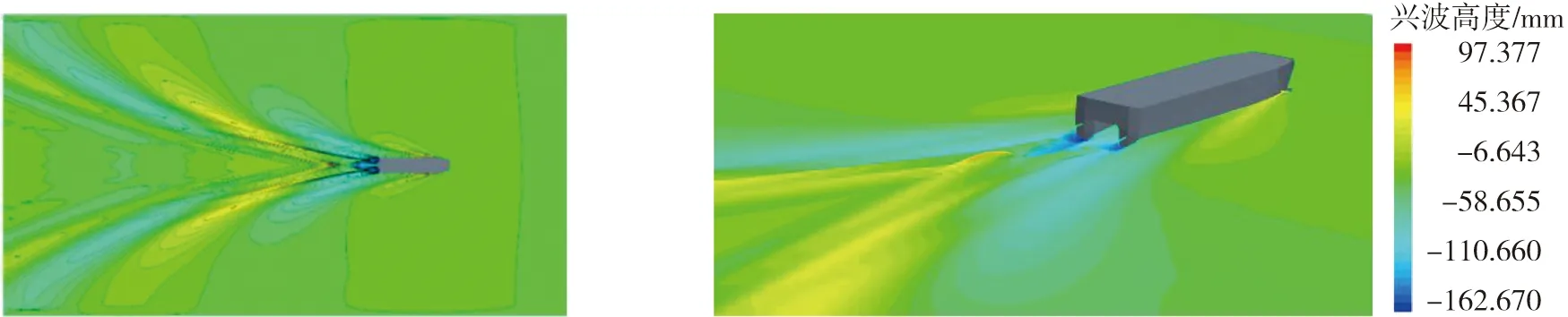
a)自由波形图 b)船侧兴波云图

a)自由波形图 b)船侧兴波云图
由图4、5可知:相比于vc=26 kn,当vc=32 kn时,随着弗劳德数提高,船两侧波峰提高且范围增加,兴波范围扩大,船艏波峰后移,船艉后兴波波峰更加明显,波峰高度有所提高。
不同工况下的船底压力分布如图6所示。由图6可知:海水压力主要作用于2个分离船体上且高压力点集中在船体的中后方;随着航速提高,船体受到的压力逐渐增大,航速为26 kn时,最大船舶压力为1 456.76 Pa,航速为32 kn时,最大船舶压力为2 123.11 Pa,相比于航速为26 kn时增大约为45.7%。随着海水压力增大,作用于船体的阻力随之增大。

图6 双体船在不同工况下的压力分布对比
计算出模型阻力后,使用二因次换算法将船模阻力换算至实船,规定艉倾的纵倾角为正,艏倾的纵倾角为负;升沉用上升或下降高度与吃水的比值表示,下沉为负,上升为正。考虑到平板摩擦阻力因数区别于真正的摩擦阻力因数,二因次法忽略了附体及风阻影响,工程上通常采用的实船总阻力补偿因数为10%[15]。实船有效功率
Pc=wcR′tc,
(8)
计算得到的实船总阻力及有效功率如表4所示,不同航速下实船总阻力及总阻力因数变化曲线如图7所示。

表4 阻力计算结果
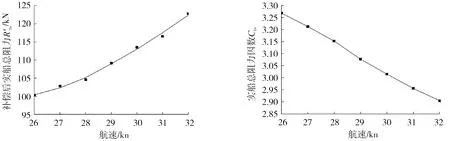
a)总阻力 b)总阻力系数
由表4及图7可知:基于RANS法得到的实船总阻力随实船航速的增大而增大;航行速度为32 kn时,补偿后的实船总阻力达到122.77 kN,相较于航速为26 kn时的阻力提升了约22.4%。随着航速提高,兴波阻力对船体的影响显著,在总阻力中影响占比增大;实船总阻力因数明显随航速增大而减小。
船舶航行工况复杂,船-机-桨达到最佳匹配状态可以使整个系统的推进效果最优[16]。船舶的有效功率
Pc=nη0δPs,
(9)
式中:Ps为主机额定功率,kW;n为发动机数;η0为船机桨总效率;δ为发动机负荷率,是主机实际功率与额定功率之比。
船舶航速计算采用插值法,计算式为:
(10)
式中:uc为实际航速,kn,下标1、2表示不同航速对应的工况点。
此双体客船采用双机、双桨的推进系统配置,主机的额定功率为1 545 kW,船-机-桨总效率约为64%。
根据数值模拟计算得到船舶总阻力结果,匹配发动机的负载特性,可以计算得到不同发动机功率下的船舶航速。按照发动机70%~100%负荷率(1 082~1 545 kW),共计算7个发动机功率在上述条件下对应的船舶航速,如表5所示。由表5可知:在发动机额定功率时,基本满足客户最大设计航速为32 kn的要求;该船主机与实船匹配效果较好,发动机负载可以覆盖航行常用速度,可以达到节能增效的目的。

表5 不同发动机功率下所对应的船舶航速
4 结论
通过RANS法对某双体客船的船舶阻力进行预测,并应用二因次转换法获得了航速为26~32 kn时的实船总阻力。
1)阻力随着航速的提升而增大,当航行速度为32 kn时,补偿后的实船总阻力达到122.77 kN;总阻力因数随着航速的提升而减小,当航行速度为32 kn时,总阻力因数降低至2.91×10-3;在高航速工况下,双体船具有较好的快速性能。
2)使用STAR-CCM+计算流体力学软件,针对双体船的阻力特性预测具有效率高、精度高和可靠性强等特点,模拟计算的阻力结果可以更好地进行船舶早期设计的船机匹配,确保整船效率得到提升。
