车内发动机噪声主动降噪辨识方法及DSP实现
2023-05-09张程鹏张士强曹蕴涛
张程鹏,张士强,李 浩,王 石,李 允,曹蕴涛
(中国第一汽车集团有限公司,吉林 长春 130011)
1 研究现状
汽车主动降噪技术(Active Noise Control,ANC)在近两年的国内汽车市场发展迅速,截至2022 年1 月,国内汽车市场有25 个品牌共63 款车型具备主动降噪功能,如合资品牌的凯迪拉克、林肯、本田、别克等,国产品牌的红旗、长城、吉利、大通等。合资品牌的产品主要由BOSE、哈曼、Silentium、松下等供应商提供,国内相关企业也逐步在国产车型上进行量产。
以乘用车四缸发动机为例,发动机噪声的能量集中在二、四、六阶,属于低频噪声,传统被动降噪方法对低频噪声的隔吸声并不理想。由于低频噪声波长较长,相位变化慢,根据声波干涉原理,主动降噪技术对低频噪声的抵消有明显优势。
1.1 国外研究进展
2017 年,HASEGAWA 等人提出虚拟麦克风技术用于修正人耳不在最佳降噪位置的问题,但增加的传递函数会占用更多的计算资源[1]。2018年,CHENG 等改进了窄带噪声的次级传递函数的辨识方法,采用一系列自适应滤波器,针对不同频带的次级传递函数特征完成建模,降低误差并提高了收敛速度[2]。
1.2 国内研究进展
2017 年,MA 等人在利用附加随机噪声法进行次级路径建模,采用无限脉冲响应(Infinite Impulse Response, IIR)滤波器减小了宽频随机噪声对残余噪声功率的影响,从而提高了系统收敛速度和建模精度[3]。2018 年,ZHAO 等人提出一种将次级路径离线识别和在线识别相结合的新型方法,可以使有源噪声控制系统达到更快更稳定的效果[4]。2019 年陈祥君在陷波最小均方算法(Least Mean Square, LMS)的基础上提出陷波延时LMS 算法,从而将参考信号的延时操作取代传统陷波LMS 算法中次级路径传递函数与参考信号的卷积操作,大幅降低算法的计算量[5]。2020 年肖梦迪提出一种基于能量比调控的次级通道在线建模有源噪声控制算法,能获得较快的建模收敛速度[6]。2021 年来昊采用误差滤波LMS 算法进行控制,噪声烦恼度明显降低[7]。WANG 等人对于窄带有源噪声控制系统提出了一种新的频率估计方法,该方法不需要原始信号的先验信息,并且大大改善了收敛特性[8]。冯智睿基于虚拟误差传感的方法,扩大了主动降噪的有效降噪范围[9]。2022年吴礼福采用一种自校正自适应算法,通过串联多个低阶滤波器以简化滤波器阶数选择并降低计算复杂度,同时获得与滤波x 最小均方算法(Filtered-x Least Mean Square, FxLMS)相当的降噪性能[10]。
2 FxLMS 算法原理
2.1 LMS 算法理论
LMS 是以误差信号的均方根最小为目标进行计算,采用有限脉冲响应(Finite Impulse Response,FIR)滤波器,其输出只和当前时刻的输入以及之前若干时刻的输入有关。
n时刻输入X(n)为
n时刻滤波器权系数W(n)为
n时刻滤波器输出y(n)为
LMS 算法基本思路为控制权系数W(n)沿着梯度方向搜索实现均方误差ε最小,下面简述公式推导过程。
期望信号d(n)与输出信号y(n)相减:
均方误差ε为
权系数更新为
2.2 自适应陷波法原理
目前车内发动机主动降噪的原理主要采用基于FxLMS 的自适应陷波滤波算法,自适应陷波算法是人为构造正弦频率信号作为参考信号,通过LMS 算法实现对某一目标频率噪声的抵消,自适应陷波滤波算法框图如图1 所示,其中x(n)为噪声源,d(n)为误差麦克风噪声处原始噪声,X0(n)为正弦参考信号,w0(n)和w1(n)为权系数,y(n)为次级声波,e(n)为误差信号,S(z)为次级传递函数,S0(z)为次级传递函数估计。由于自适应陷波算法结构简单、计算量较小,并受限于汽车成本,因此,工程应用广泛采用自适应陷波算法。
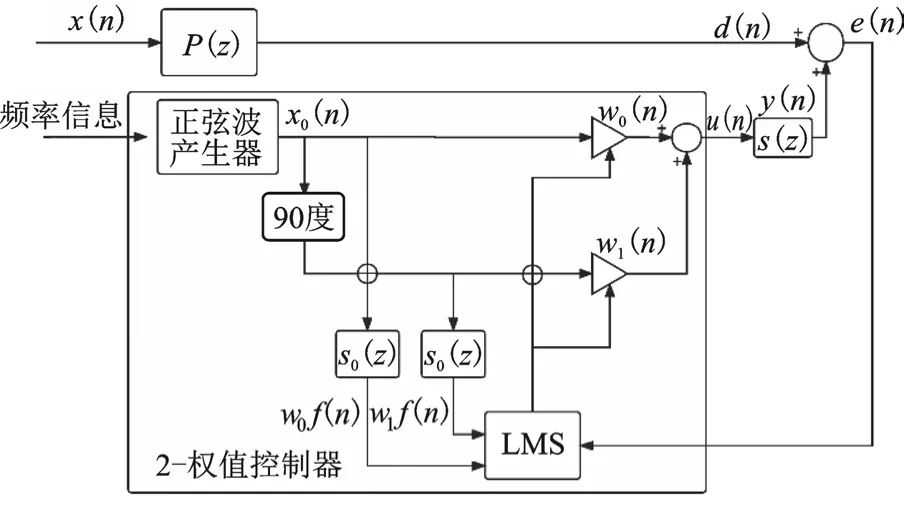
图1 自适应陷波法原理图
3 仿真模型
本文采用 Simulink 建立了自适应陷波模型,采集实车的加速噪声及转速数据,对转速进行平滑处理,比较降噪前后的仿真结果,对该算法进行了验证,结果符合预期。
在Simulink 仿真环境中建立的主动降噪仿真模型如图2 所示。仿真模型采用车内原始加速噪声数据及发动机转速数据,根据转速构建正弦参考信号。为满足LMS 算法的收敛的要求,其中可调节的参数包括迭代步长、泄露因子、信号幅值等,运行模型能够验证陷波算法的有效性。但需要注意的是,纯数值仿真无法模拟真实次级路径与次级路径估计的差异。
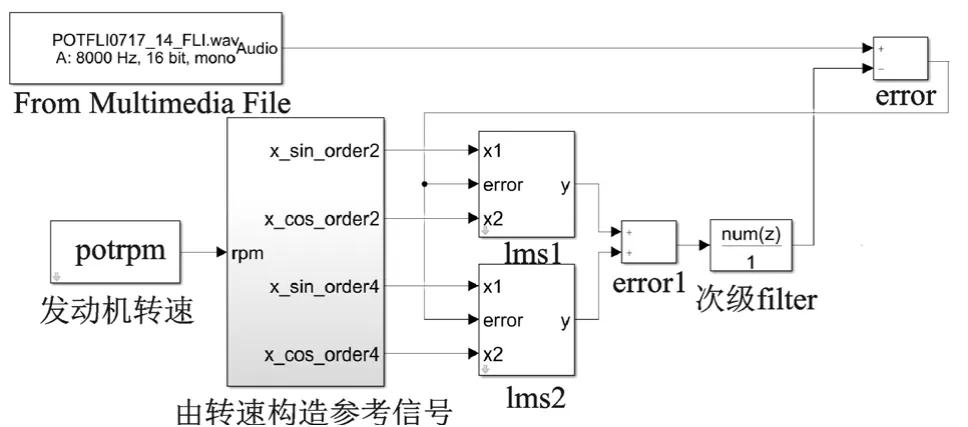
图2 自适应陷波仿真模型
某四缸机车型加速工况驾驶员左耳噪声仿真效果对比如图3 所示,仿真结果验证了仿真模型和算法的有效性。图3 上半部分为原始噪声,图3下半部分为仿真降噪后的效果,可以看出发动机二阶噪声明显降低,验证效果符合预期。
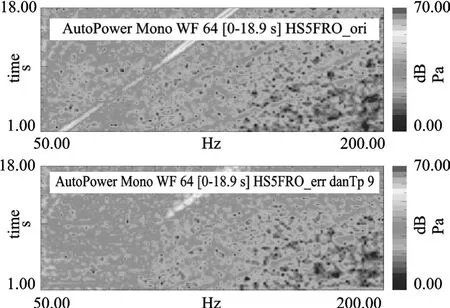
图3 仿真降噪前后对比图
4 扫频辨识方法
次级路径的辨识过程有离线和在线两种方法,其中离线建模是在系统未工作时,对次级路径的传递函数用FIR 滤波器进行估计,对于车内主动降噪系统的次级路径建模,当硬件系统的位置和参数确定后,次级路径特性保持不变,因此,车内主动降噪研究普遍采用离线建模的方式估计次级路径。
次级路径的辨识是数字信号从发出到再次采集的过程,主要体现了信号的延时和相位变化,包含了硬件电路、扬声器、空气、麦克风的完整的信号传输路径。实现过程如图4 所示。
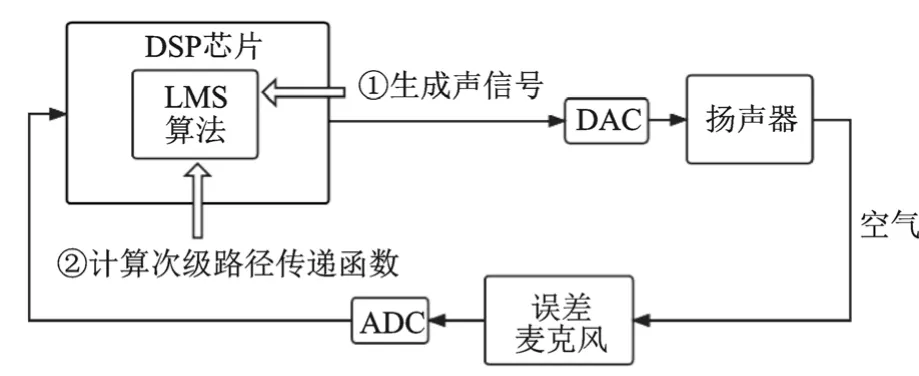
图4 离线辨识次级路径过程示意图
目前公开的研究成果对次级路径建模采用白噪声信号进行辨识过程的计算,本文采用一种扫频方法进行次级路径离线建模工作,通过合成降噪频率区间的正弦波进行扫频辨识,估计出次级路径的时延系数的拟合曲线,在进行控制程序滤波时调用。该方法的优点在于采用连续变化的频率进行建模,频率范围和运行时间可根据研究或工程需要灵活调整。
扫频信号的计算推导如下:
频率函数为
式中,f0为初始频率;k为增长系数。
式中,f1为终止频率。
则计算相位函数需要对f(t)积分,得
所以正弦扫频的函数为
采用上述推导的扫频公式结合扬声器的频响特征,研究过程设定扫频范围为50~300 Hz,时间为10 s。在车内环境下进行次级路径的辨识结果如图5 所示。
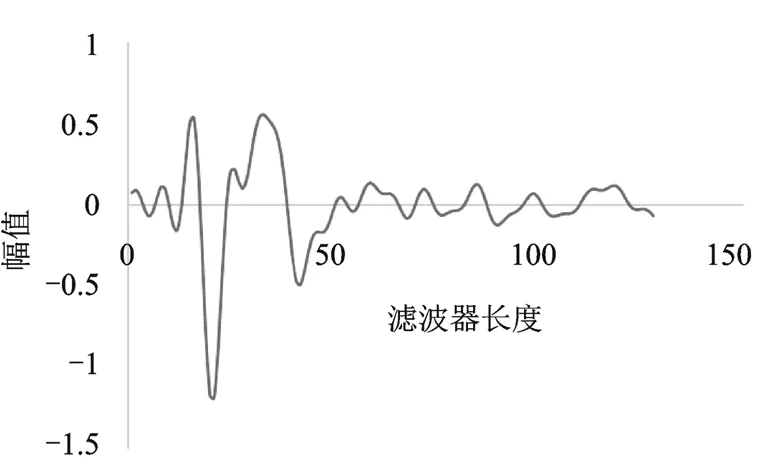
图5 次级路径辨识结果
5 DSP 控制器与实车匹配
DSP 芯片是一种特别适合于进行实时数字信号处理运算的微处理器,具有独立的硬件乘法器,乘法指令可在单周期内完成,使卷积、数字滤波、相关运算、矩阵运算等算法中的大量乘法运算速度加快。
本文使用的硬件控制器的DSP 芯片型号为ADI 21489,使用C 语言对控制器进行固件开发及主动降噪算法移植。控制器具备麦克风信号读取、控制器局域网(Controller Area Network, CAN)信号读取,数据处理及驱动扬声器发声等功能,可以满足研究工作的需求,进行主动降噪效果验证。本节内容对DSP 控制器与实车的匹配工作进行介绍,包括硬件接口匹配、发动机转速信号接口匹配、发动机转速与控制器程序匹配。
5.1 硬件接口匹配
本研究采用原车线束进行音响系统与控制器的匹配,通过以下过程完成控制器与原车扬声器的匹配工作。实物效果如图6 所示。
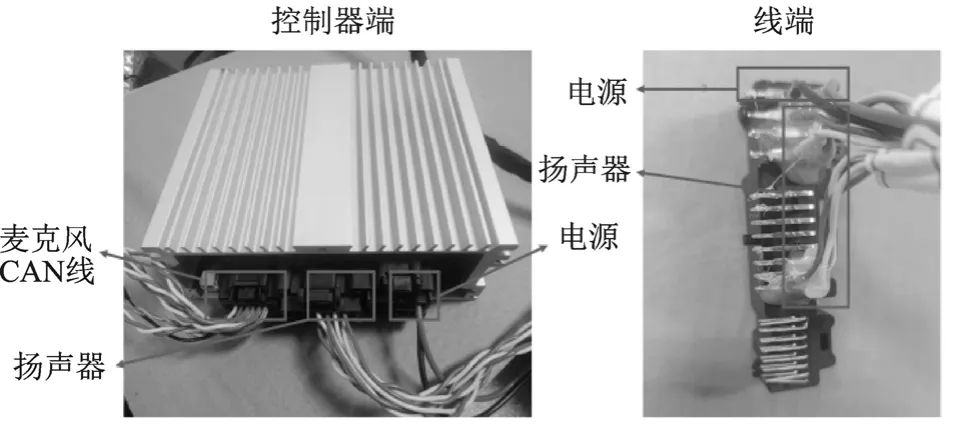
图6 控制器接口及匹配
参照原车功放的针脚接口定义确认原车线束端的电源、扬声器线束位置;根据控制器端的接口定义,确认控制器端的电源、扬声器、CAN、麦克风的针脚,通过接插头线束引出;通过线端的接插件,将原车线束定义与控制器端的线束定义对应连接。
5.2 发动机转速与控制器程序匹配
根据自适应陷波算法的原理,需要转速信号生成主阶次频率的参考信号。从车载诊断系统接口(On Board Diagnostics, OBD)引出CAN_H、CAN_L 针脚;使用CAN 分析仪连接并确认读出正确的发动机转速信号;引出信号接入控制器;修改微控制单元(Micro Controller Unit, MCU)部分程序代码,根据原车OBD 文件修改发动机转速信号对应的地址、掩码、高低位、精度和偏置量。将修改好的程序刷入控制器的MCU 中,通过控制器的上位机可以显示出当前发动机的转速数值,即完成了发动转速与控制器的程序匹配。
主动降噪程序具备了在实车环境下进行闭环验证的硬件条件。控制程序能够在DSP 上运行,以发动机转速为前馈信号、麦克风误差信号作为反馈信号,进行主动降噪功能验证。
6 实车布置与测试结果
6.1 车内主动降噪的硬件布置方案
降噪麦克风布置在副驾驶头枕位置,控制器布置在后备箱内,驱动右前车门低音扬声器发声,降噪麦克风布置在副驾驶头枕处。测试使用的标准传声器布置在与降噪麦克风相同的位置,如图7所示,其余测试设备及测试人员均在后排。

图7 误差麦克风与标准传声器布置图
6.2 试验结果
在转毂试验室进行主动降噪功能测试,用扫频方法得到次级路径的系数(图5),将系数导入降噪控制程序中进行主动降噪性能测试。测试工况选择挡位锁定在二挡,缓加速20 s,发动机转速从1 000 r/min 上升至4 000 r/min。通过标准传声器采集噪声数据并分析发现,300 Hz 以内的发动机二、四、六阶降噪效果明显,30~300 Hz 的Overall(OA)值最大降低4 dB。试验结果如图8所示,其中虚线为原始噪声,实线为开启主动降噪的效果。
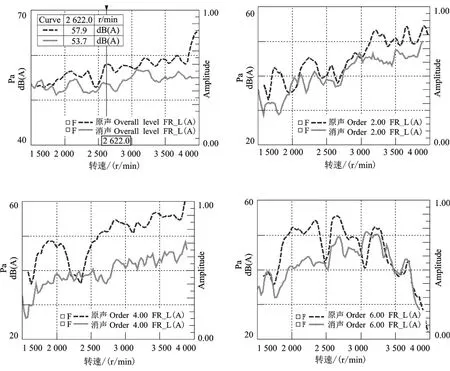
图8 主动降噪开关前后对比图
6.3 结果分析
测试结果证明主动降噪效果明显,证明扫频辨识方法行之有效。根据主动降噪算法的原理,对于较突出的频率噪声有明显降噪效果,并且主观感受明显;反之若发动机阶次噪声控制的很好,阶次噪声较小,则主动降噪的降噪幅度较小,主观感受相对微弱。本试验样车的发动机阶次噪声较为突出,测试结果表明主动降噪技术是一种有效的发动机噪声解决方案。
7 结束语
本文首先介绍了主动降噪的国内外研究进展以及部分原理,其次通过仿真模型验证了算法的可行性,最后从工程角度介绍了主动降噪系统从线束连接、控制器通讯、硬件布置、DSP 代码控制实现过程。本文提出了一种采用扫频辨识的方法进行发动机主动降噪的次级路径研究,采用50~300 Hz 区间的扫频信号完成辨识,并使用DSP 控制器在车内验证了主动降噪的效果。测试结果表明50~300 Hz 的发动机二、四、六阶降噪效果明显,声压级 OA 值最大降低4 dB。试验结果验证了扫频方法用于次级路径建模是可行的,可根据需要灵活调整,是一种切实可行的方法。
