分布式驱动电动客车转矩矢量控制策略研究
2023-05-08刘志军
刘志军, 苏 亮, 陈 超
(厦门金龙联合汽车工业有限公司, 福建 厦门 361023)
分布式驱动电动客车满足城市客车低地板、宽通道、低能耗和高安全要求,已成为未来电动客车的发展方向。分布式驱动电动客车采用轮边电机作为控制执行单元和信息单元[1],通过驱动/制动力矩矢量控制和失效协调控制,提升车辆的操纵稳定性和安全性[2-3]。其中转矩矢量控制多采用分层式控制架构,上层控制器为运动跟踪层,采用跟踪控制算法计算车辆广义控制量[4-6],包括车辆纵向驱动力和附加横摆力矩;下层控制器为转矩分配层,将上层得到的广义控制力作为输入,同时考虑各执行器约束条件和路面情况,计算得到各轮电机的驱动/制动力矩,从而实现车辆横纵向运动的协调控制[7-10]。本文也采用分层式控制架构设计某分布式驱动电动客车转矩矢量控制策略。
1 转矩矢量控制策略架构
分布式驱动电动客车转矩矢量控制策略架构如图1所示,分为上下层,其中上层为直接横摆力矩控制,直接横摆力矩控制采用了基于LQR(线性二次调节)的跟踪反馈控制算法;下层为转矩分配控制,通过车辆状态参数识别当前运行工况,选择合适的转矩分配策略,同时考虑路面附着系数、轮胎力边界以及电机扭矩限制和斜率限制等约束条件[11-12],计算得到各轮的驱动力矩。
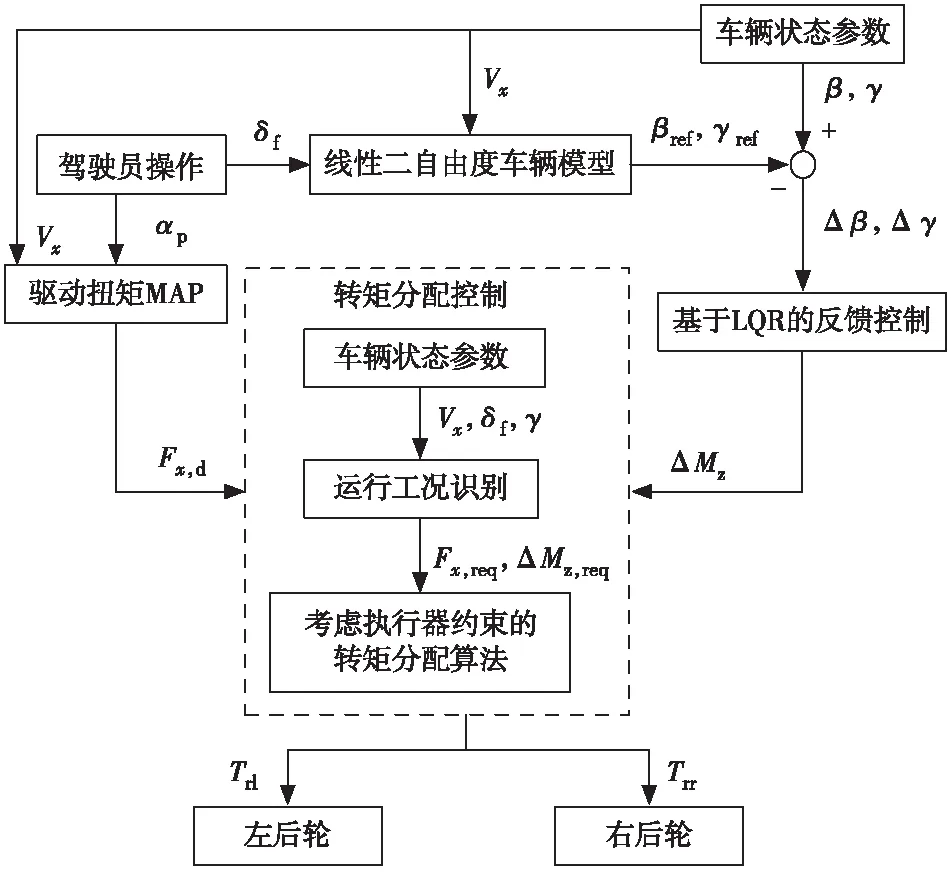
图1 分布式驱动电动客车转矩矢量控制策略架构
2 基于LQR的直接横摆力矩控制
研究采用以前轮转角作为输入,横摆角速度和质心侧偏角作为输出的线性二自由度车辆模型,如图2所示。
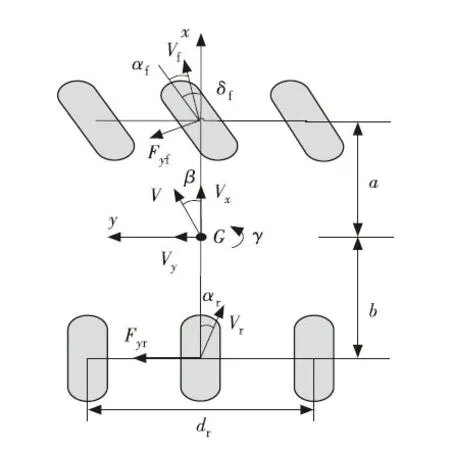
图2 线性二自由度车辆模型
根据线性二自由度车辆模型,车辆运动方程可表示为
(1)

当车辆处于稳态行驶工况时,质心侧偏角较小,车辆的航向角主要由横摆角速度决定,横摆角速度越大,航向角也越大,其转向半径就越小,所以当质心侧偏角较小时,横摆角速度直接决定了车辆的运动状态。同时为避免过度转向导致车辆失稳,车辆应具有适度的不足转向特性,即理想不足转向度。一次型的理想不足转向度能使车辆的转向特性尽量维持在线性区,提升车辆的操纵稳定性,因此本文采用一次型的理想不足转向度来计算参考横摆角速度。
一次型的理想不足转向度δUS可表示为
δUS=|αf-αr|=C·|ay|
(2)
式中:C为控制系统的标定参数;ay为侧向加速度。
车辆的前、后轮侧偏角可表示为
αf=β+aγ/Vx-δf
αr=β-bγ/Vx,β=Vy/Vx
(3)
式中:β为质心侧偏角;δf为前轴转角;Vy为质心处的侧向速度。
则车辆的理想不足转向度的表达式为
|(αf-αr)/ay|=|(L·γ/Vx-δf)/ay|=C
(4)
根据上式可计算出不同前轮转角和车速下的参考侧向加速度:
(5)
考虑路面附着系数的限制(|ay|<μ·g),并参考侧向加速度ayref,可得到参考横摆角速度γref:
γref=ayref/Vx,|ayref|≤is·μ·g
(6)
式中:μ为路面附着系数;is为经验值,这里取0.9;g为重力加速度。
当质心侧偏角较小时,横摆角速度决定车辆的运动状态,但随着侧向加速度和质心侧偏角的增大,轮胎的侧偏特性进入非线性区域,此时轮胎的侧向力趋近饱和,无法随着侧偏角增加而继续增大,横摆力矩开始减少并最终趋于稳定值。此时驾驶员很难通过操纵方向盘来有效控制车辆,容易出现车辆失稳等危险情况,此时仅用横摆角速度无法全面表征车辆行驶状态,要与质心侧偏角联合表征。因此随着侧向加速度和质心侧偏角的不断增加,为保证车辆稳定性,选择质心侧偏角作为车辆运动跟踪目标,将零化质心侧偏角作为控制目标,即所选择的参考质心侧偏角βref=0。
本文采用LQR算法,根据车辆实际横摆角速度和质心侧偏角与参考值的差值计算附加横摆力矩,从而实现车辆运动状态的跟踪控制。
将式(3)带入线性二自由度车辆运动方程,可得:
(7)
将式(7)转化后可得:
(8)
将式(8)表示成状态方程为

(9)
其中,
(10)
车辆参考模型为运动跟踪控制的跟踪目标,即参考横摆角速度和参考质心侧偏角,运动跟踪目标Xd可表示为
(11)
为了求解最优横摆力矩ΔMz,控制器性能指标J应该取最小值,即:
(12)
式中:Q和R分别为LQR控制器的权重矩阵;qβ、qγ、rΔMz分别代表对质心侧偏角、横摆角速度以及横摆力矩的重视程度,构造Hamiltonian方程如式(13),P为黎卡提方程的解:
Q+ATP+PA-PBR-1BTP=0
(13)
得到最优解即为需求横摆力矩ΔM:
ΔM=U*(t)=-R-1BTPX+
R-1BT(AT-PBR-1BT)-1(PCδf-QXd)
(14)
3 转矩分配控制
下层转矩分配控制是将上层控制器得到的广义控制力合理分配到各个车轮上,在满足执行器约束条件的前提下,尽可能满足附加横摆力矩和纵向驱动力的需求,因此设计最优的转矩分配控制策略是提升分布式驱动电动客车综合性能的关键。
3.1 执行器约束条件
各轮的纵向驱动力受到电机外特性、电机扭矩斜率以及路面附着系数等条件约束。由于电机具有低速时驱动转矩恒定、高转速时驱动功率恒定的特点,当电机转速超过额定转速时其驱动转矩下降较快,电机所能产生的最大驱动转矩受到当前转速的约束,电机外特性约束可表示为
-Tmax/r≤Fx≤Tmax/r
(15)
式中:Fx为轮胎纵向力;r为轮胎半径;Tmax为电机在当前转速下所能提供的最大转矩。
同时为避免转矩波动过大对驱动轴产生冲击,影响驾驶和乘坐舒适性,还需要对电机扭矩斜率进行如下约束:
(Tk-1-ΔTmax)/r≤Fx≤(Tk-1+ΔTmax)/r
(16)
式中:Tk-1为上一时刻的电机扭矩;ΔTmax为一个控制周期内电机转矩允许变化的最大值。
此外轮胎纵向力和侧向力是影响车辆行驶稳定性的主要因素,其大小主要受到轮胎自身特性、路面附着情况、各轮垂直载荷等因素影响,根据附着椭圆理论,车轮纵向力需满足如下约束:
(17)
式中:Fx为轮胎纵向力;Fy为轮胎侧向力;Fz为轮胎垂向载荷;μ为路面附着系数。
综上所述,车轮纵向驱动力的上下限可表示为
(18)
3.2 转矩分配控制
城市客车运行工况复杂,且不同运行工况的性能目标也不尽相同,如何根据车辆运行工况选取合适的控制目标是提升车辆性能的关键。因此,本文设计基于动力性和稳定性的转矩分配策略,并结合车辆运行状态进行切换。
首先根据车速、横摆角速度以及方向盘转角识别车辆当前运行状态,并确定当前状态下的主要性能目标。若此时车速较低,或车辆在中高速做直线运动或方向盘转角较小的转向运动时,则以动力性作为主要性能目标,采用基于动力性的转矩分配策略;若车辆处于中高车速,且方向盘转角和横摆角速度较大时,则以车辆稳定性作为主要性能目标,采用基于稳定性的转矩分配策略。基于动力性和稳定性的转矩分配控制策略如图3和图4所示。
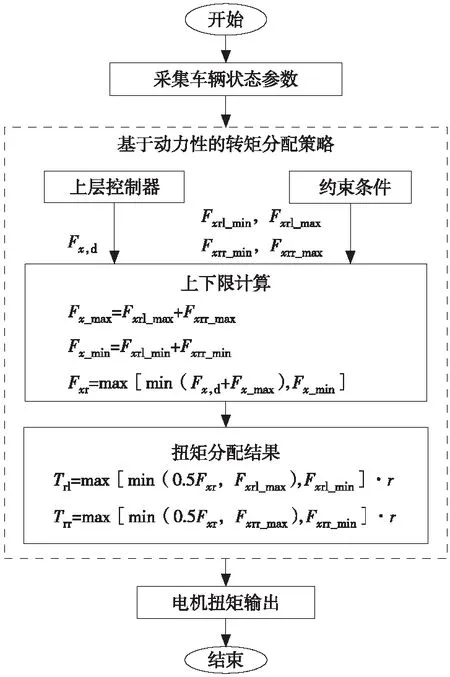
图3 基于动力性的转矩分配控制策略
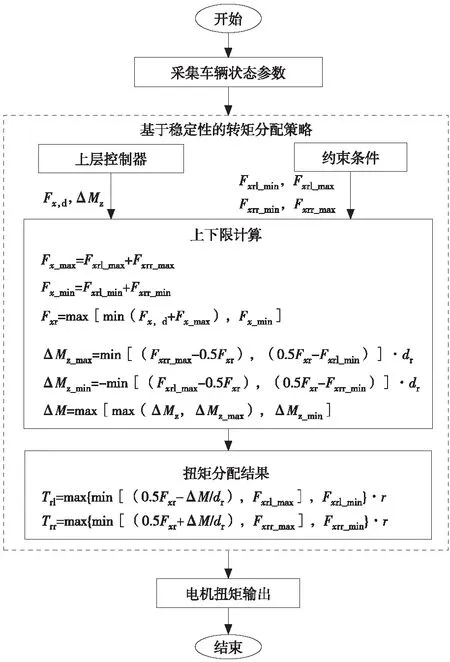
图4 基于稳定性的转矩分配控制策略
4 实车试验验证
按照GB/T 6323—2014《汽车操纵稳定性试验方法》中的稳态回转方法进行实车验证[13],同时为验证转矩矢量控制策略的控制效果将试验车辆的转矩矢量控制系统关闭,按照平均分配的方式进行上述测试,对比两种控制方式下的车辆操纵稳定性。图5~图8分别为转矩矢量控制开启与未开启时车辆的侧向加速度、纵向车速、横摆角速度误差和行驶路径对比。
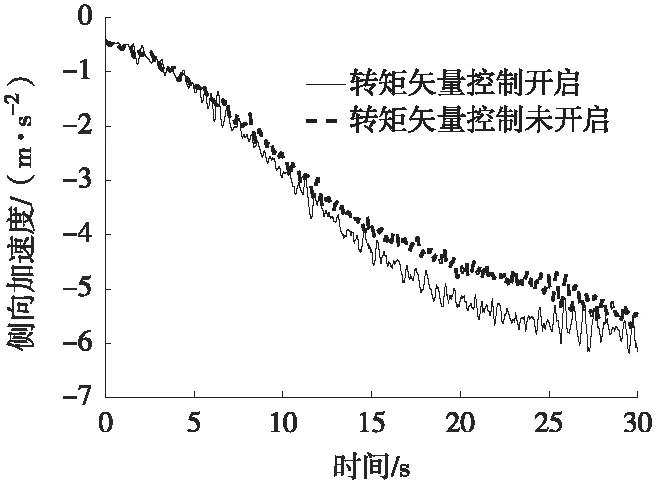
图5 侧向加速度对比
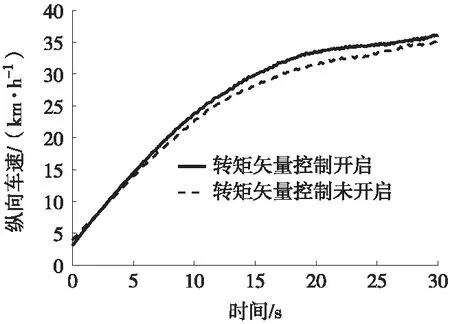
图6 纵向车速对比
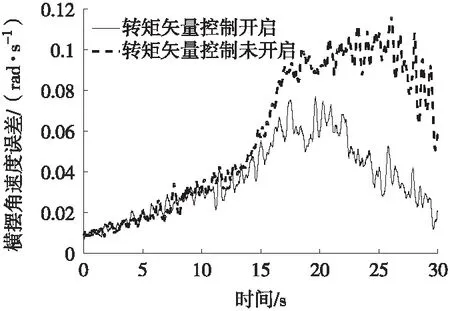
图7 横摆角速度误差对比
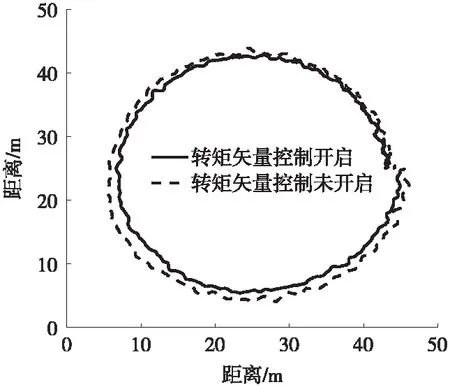
图8 行驶路径对比
从图5~图7中可以发现,转矩矢量控制开启的车辆,其最高车速和最大侧向加速度均大于未开启控制的车辆,同时其横摆角速度误差也明显小于未开启控制的车辆,说明转矩矢量控制策略能够很好跟随参考横摆角速度,而未开启转矩矢量控制车辆的实际横摆角速度无法跟随参考横摆角速度,且偏离参考横摆角速度较远。同时对比图8所示的行驶路径,可以看出开启转矩矢量控制车辆的行驶路径更接近于圆形。上述对比试验证明了该策略能够有效改善车辆的操纵稳定性。
5 结束语
本文基于分层式控制结构设计分布式驱动电动客车转矩矢量控制策略,上层横摆力矩控制采用基于LQR的跟踪反馈控制,下层通过识别当前运行工况并考虑执行器的约束条件,采用基于动力性和稳定性的转矩分配控制策略求解各轮驱动力矩。并按照GB/T 6323—2014《汽车操纵稳定性试验方法》[13]中的稳态回转方法进行实车对比试验。试验结果证明了该转矩矢量控制策略能够有效改善车辆的操纵稳定性。
