自动驾驶汽车交通肇事的归责困境及刑法应对
2023-05-05袁佩君
袁佩君
(中国社会科学院大学 法学院,北京 102488)
一、问题的缘起
近年来,大数据、计算机等信息技术的成熟,加速了人工智能的发展,以无人驾驶汽车为代表的智能化产品迅速渗透到人们日常生活的不同领域,而机器智能化水平不断提高、接近甚至超越人类的思维水平,成为一种高度自主、脱离人类控制,甚至能独立做出判断的新事物,而此种新兴事物甫一出现就给当前的法律体系带来了巨大挑战。
(一)案例引入
2016年1月20日,一辆特斯拉轿车在京港澳高速河北邯郸段撞上一辆正在同向车道前方行驶的道路清扫车,司机高某不幸身亡。经交警认定,司机高某开启了自动驾驶模式,事故发生时特斯拉速度并不快,处于“定速”状态,但自动驾驶系统未能识别前方障碍物而撞上前车,直接导致了事故发生。由此,该案成为全球第一例自动驾驶汽车致人死亡的案件[1]。
2018年3月18日,美国亚利桑那州,一辆由沃尔沃XC90改良后的Uber自动驾驶汽车发生交通事故导致一名女子死亡。据警方调查发现,在事故发生时该名女子突然闯入机动车道企图推着自行车横穿马路,在随后公布的行车记录仪的两段视频中,一段视频显示车辆前方并未出现任何障碍物,几秒过后,一女子推着自行车突然出现在汽车行驶的前方,而后被撞倒在地。另一段视频显示在事故发生前驾驶员播放社交软件上的娱乐视频导致注意力分散,眼睛偏离车道,长期往右下方看。美国国家运输安全委员会公布的事故报告显示,在事故发生的前6秒,汽车已经探测到该女子的出现,但系统首先将其认定为不明物体,再将其认定为一辆车,最后才将其认定为缓慢移动的自行车,因为智能汽车的目标检测系统未能准确识别,所以无法预测该物体速度,进而未发出任何预警信息,也没有采取减速或转向措施,最终导致事故发生[2]。
以上都是实践中自动驾驶汽车发生的真实案例,除此之外与自动驾驶汽车有关的交通事故在世界范围内也多次发生,为应对自动驾驶汽车所带来的技术风险,许多国家都出台了相关的法律措施进行规制,如美国于2017年批准了《自动驾驶法案》(Safely Ensuring Lives Future Deplay and Research In Vehicle Evolution Act,通常缩写为“Self Drive Act”);德国于2017年以第八修正案的形式修改《道路交通法》,制定了关于自动驾驶的第一个法律框架,2021年5月28日,德国联邦委员会全体会议通过《自动驾驶法》,允许L4级别(高度自动化驾驶)自动驾驶汽车于2022年在德国公共道路上行使;我国也在2018年颁布《智能网联汽车道路测试管理规范(试行)》等法律文件,但是相关法律规范的制定多停留在行政和民事领域,而对于自动驾驶汽车可能引发的刑事法律风险却所涉甚少。
就当前自动驾驶汽车引发的刑事风险,即自动驾驶汽车引发交通事故后刑法层面的规制问题主要涉及以下几点:
首先,在自动驾驶汽车的行驶过程中人类驾驶员的驾驶行为被全部或者部分剥夺,自动驾驶汽车的肇事使得传统的交通肇事罪对其束手无策,如何确立犯罪主体,机器是否具有责任主体的资格值得我们进一步深思。
其次,自动驾驶汽车的智能性使得其区别于传统工具型的车辆,当系统出现决策失误和“算法黑箱”等异常介入因素造成交通事故时,如何对此种新型过失犯的因果关系进行判断也成为我们传统刑法面临的一大困惑。
最后,在不同主体的刑事责任分配和承担上,自动驾驶汽车使用者、自动驾驶系统的研发、设计人员以及生产制造厂商因为各自角色和分工的不同而不能一概以交通肇事罪定罪处罚,不同主体对自动驾驶汽车交通肇事后的罪名认定也是我们需要探究的问题。
(二)自动驾驶汽车:定义与分级
自动驾驶汽车又被称为智能网联汽车,指机动车与智能技术的有机结合,其配备先进的车载传感器、控制器、执行器并与计算机信息技术、大数据、云计算等智能系统相融合,实现车辆对外部环境的感知分析,进行智能决策实现“高效、安全”的车辆运行,达到解放人类双手降低交通风险的目标(1)《国家车联网产业标准体系建设指南(智能网联汽车)》的通知,工信部联科[2018]109号,网址:http://www.gov.cn/zhengce/zhengceku/2018-12/31/content_5440205.htm。。其他国家对自动驾驶汽车的具体定义可能存在不同,但是在基础特征和分级标准上基本保持一致。
我国2020年3月由国家工业和信息化部发布的《汽车驾驶自动化分级》规定了汽车驾驶自动化功能的分级,共划分为6个不同等级,依次为0级(应急辅助)、1级(部分驾驶辅助)、2级(组合驾驶辅助)、3级(有条件自动驾驶)、4级(高度自动驾驶)、5级(完全自动驾驶)[3]。该分类与国际汽车工程师学会(SAE)的划分标准基本相同,学界和汽车行业也多以此分类标准为准,如表1。
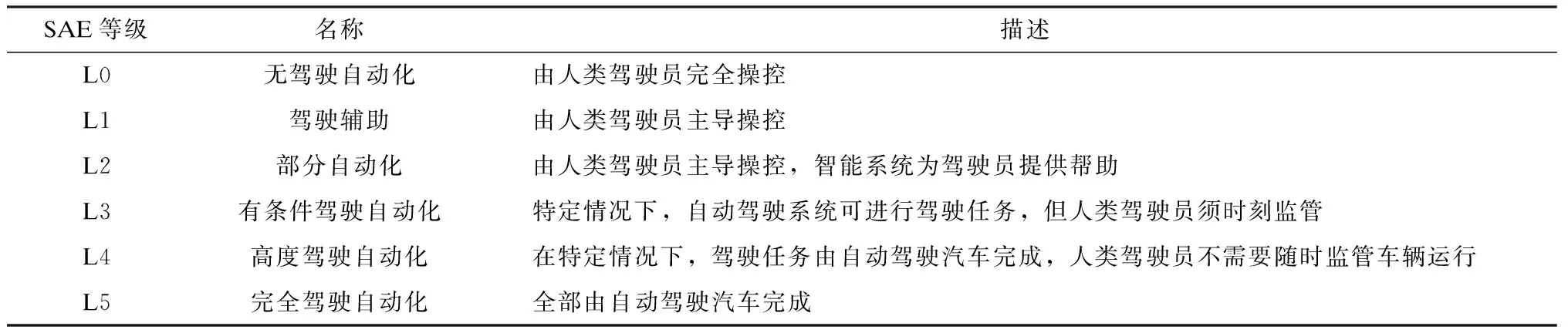
表1 SAE自动化分级
资料来源:“SAE Levels of Driving Automation”.http://cyberlaw.stanford.edu/blog/2013/12/sae-levels-driving-automation。
根据表1中自动驾驶汽车的分级标准,我们需要进一步说明:在L1~L2等级,汽车的自动驾驶系统只是作为驾驶员的辅助,目的在于帮助驾驶员更好地判断路况,尚不在自动驾驶技术范围内,L3是一个重要意义的过渡,进入这个阶段后,汽车开始由自动驾驶系统监控车辆行驶,但驾驶人员应当根据系统提示随时接管汽车;真正意义上的无人驾驶特指L4、L5阶段,汽车可以在特定和任何条件下完成驾驶任务,而本文对自动驾驶汽车的归责研究也主要集中在L4、L5这两种高度自动化的阶段。
二、自动驾驶汽车对传统刑法归责提出的挑战
自动驾驶汽车交通肇事所引发的风险涉及民事、行政、刑事等多个领域,原则上为新兴技术的发展留足成长的空间,刑法应秉持谦抑的姿态让位于行政、民法的规制,以侵权损害赔偿和强制保险等方式救济已有损害。但需要注意的是这种科技发展带来的风险代价,不能超过人类可能容忍的限度,因此当民事、行政手段不足以迫使生产者改良技术提升自动驾驶汽车的安全性能时,刑法就须“责无旁贷”地发挥其在社会治理中的作用。
(一)自动驾驶汽车交通肇事主体地位的争议
自动驾驶汽车交通肇事主体地位的争议问题其实是对具有自主性和深度学习性的智能机器能否成为刑法上具有独立地位能够承担刑事责任的主体的探讨,对此目前学界呈现出几种不同的立场。
一种以支持“机器人刑法”为代表的观点认为人工智能具有犯罪主体资格,对其造成的刑事风险应当通过刑法予以规制,以自动驾驶汽车为例,支持该观点的学者认为“自动驾驶汽车具有超强的处理能力、极快的反应能力和精准的控制能力,满足刑法上行为主体所要求的辨认和控制能力,能够视为交通肇事罪的责任主体”[4]。但此观点内部也有学者对自动驾驶汽车的刑事责任主体地位存在不同的看法,其支持智能机器具备责任主体地位,但是此时的智能机器不同于当前自动驾驶汽车所处的弱人工智能,是已经超过“奇点”,在认知通识、科学创新、社交技能等所有领域都超过人类大脑的超人工智能体,此时智能机器具有自己的辨认和控制能力,即拥有了行为选择权等类人性,因此能够自行承担刑事责任[5]。如果按照此学者观点和逻辑,那么确实可以突破传统刑事归责的局限性而妥善解决问题,但该主张忽略了人与机器的本质区别。
一种观点反对智能机器具有刑事责任的主体资格,认为刑法中的犯罪主体是指实施危害社会的行为并依法应当承担刑事责任的自然人和单位,《中华人民共和国刑法》第十七条、第十八条、第十九条等多处条文也表明我国刑法中的犯罪主体仅包含自然人和单位。该观点认为,主观意识和客观行为作为犯罪行为的构成要件,是人类特有的机能,而智能机器并不符合犯罪的主客观要件,也难以实现预防犯罪的刑罚目的[6]。
还有一种观点略显折中,援引法人概念进行类比,认为刑法可以赋予单位主体地位,待时机成熟赋予类人型人工智能体的刑法主体地位也并非不可能[7]。而且“单位”这一刑事责任主体的特性与人工智能体有异曲同工的地方,两者都是非人非物,社会属性和主体资格都由法律拟制而成,既然存在这样的立法先例,那么对人工智能体的拟制也不存在不可逾越的立法障碍。
笔者立足于当下人工智能的发展现状,以客观理性的态度对自动驾驶汽车等智能机器的刑事主体地位进行分析,反对赋予其刑事责任的主体资格,理由主要有以下几点:
第一,作为前提性的要件,必须明白当前智能技术的发展仍然处于弱人工智能阶段。未来是否会出现许多学者口中描述的强人工智能时代,仍属于不可知,假设真的出现了,那么具有同等乃至超越人类理性与认知的强人工智能体是否还会接受人类为其设定的社会规则就更加值得讨论,纵然今日设计了完美无比的制度框架,届时人类一旦失去框定人工智能的锁链,反倒会出现“人工智能在思考如何为人类立法”的失控局面[8]。
第二,从“人”的实质要义出发,人工智能体不具备“人”的主体性特征,从哲学上溯源,“人”是主观意识和客观载体相结合的产物[9]。有哲学家认为“一个行为是应受奖赏还是处罚,应当要看该行为是否是由自由意志所引起”[10]。而作为人的自由意志应当包含辨认能力(2)辨认能力是指行为人具备对自己的行为在刑法上的意义、性质、后果的分辨认识能力。和控制能力(3)控制能力是指行为人具备决定自己是否以行为触犯刑法的能力。,就辨认能力而言,以自动驾驶汽车为例,其智能驾驶系统对外界事务的辨认来源主要通过电子眼,但电子眼这种器物一来可能会遭到破坏和风化磨损,二来能力也受限于自然环境以及零件敏感度的高低,收集到的信息能否正确和完整辨认尚不可知,更不要说作出与人类相似的对自己行为意义、后果的确认与理性判断;就控制能力而言,自动驾驶汽车的智能系统对收集的信息整合分析是建立在人类对程序预先设定的算法逻辑之上,也就是说,智能系统的控制能力完全依赖于人类的程序设定,超出设定外的情况就无法处理,更不要说能够自我感知、学习知晓自己的行为是否与现行法律相抵触而作出适法的控制行为。
因此无论是哪种类型的人工智能,其与人类相比可能只是在某一方面拥有超越了人类的某种分析、决策能力,即便如此也不能说人工智能具备了人之理性,能够赋予其与人类相同的刑事法律主体地位。
第三,从责任的可非难性角度来看,以自动驾驶汽车为代表的人工智能体并不具备受刑能力。刑罚的本质是痛苦、是与犯罪相关联并给犯罪人带来痛苦的制裁措施[11]。受刑能力是犯罪人对刑罚这种剥夺性痛苦的感受和承担,而刑罚的痛苦包括两个方面的内容,其一是直接或间接造成身体感知上的痛苦,其二是剥夺或限制社会活动资格造成的情感痛苦[12]。显然,作为人工智能体并不具备人类的感官系统,更无法体会人类生老病死、怨恨别离等世俗的痛苦;另外,我国当前的刑罚种类包括五种主刑“死刑、无期徒刑、有期徒刑、管制、拘役”,还有三种附加刑“罚金、没收财产和剥夺政治权利”,这八种刑罚没有哪种能对人工智能体实施,即便如一些学者假想的那样增设“删除数据、修改程序、永久销毁”等刑罚措施[5],但对于一个没有思想无法感知痛苦的机器,刑罚对它们来说没有任何意义。
(二)传统过失犯理论对自动驾驶汽车交通肇事的归责空白
在自动驾驶情景模式下,汽车的智能系统不仅存在自动等级的划分,还存在“算法黑箱”,这些特殊且异常因素的存在使得传统的过失犯理论(旧过失论)在具体的实践运用中出现困难。
作为前提性的要素我们需要说明的是,“算法黑箱”的概念是相对于“算法透明”的概念而提出的,它们是两种截然相反的状态。“算法黑箱”中的“黑箱”一词来自控制论,作为一种隐喻,指“为人所不知的那些既不能打开、又不能从外部直接观察到其内部状态的系统”[13]。由此,“算法黑箱”是指算法运行到某个阶段由于所涉及的技术复杂且大多数人无法了解或者得到解释的状态,而造成此种现象的原因主要包括两方面:
一种是人为原因,人工智能、互联网等依靠算法大数据的企业为实现自身的利益诉求和保障商业竞争优势,人为构设这种不透明的“算法黑箱”以确保算法的安全和算法的保密。
另一种是技术原因,当前算法主要采取的深度神经网络技术(4)深度神经网络是计算机用来理解世界的方式,也是机器学习的重要算法模型,但该模型的研究人员发现在神经网络的输入层和输出层之间,存在着一个隐藏层(hidden layers),没有人真正了解计算机在其中是如何工作的,即人们无法弄清机器到底是如何通过输入的数据最终形成决策的。,该技术的核心部分是通过对数据进行自动学习后自动生成指令而非按照人工设计,因此对于所输出的结果,具有不确定性和无法预知性(5)参见:https://www.samr.gov.cn/wljys/ptjjyj/202112/t20211210_337980.html.,也即从数据的“输入端”到决策的“输出端”,这一过程中如何运行和计算,当前的技术无法作出合理解释[14]。本文所讨论的主要是基于第二种原因产生的“算法黑箱”。
当智能系统等级处于L1~L2情况下,智能汽车的交通肇事处理方式和普通汽车一样,在L3等级的自动驾驶汽车,由于驾驶员仍被期待随时接管汽车,因此如果驾驶员疏忽大意或者过于自信未能接管汽车,导致人员伤亡的或者其他法益侵害的,必然由驾驶员承担过失犯罪的责任。但问题的关键在于L4~L5等级,此时人类驾驶员的驾驶行为让渡于智能机器,但机器的智能系统存在“算法黑箱”,我们无法预知通过智能计算后的汽车在具体行驶场景中作出何种行为决策,如果车辆发生交通事故造成他人人身或财产法益侵害,那么根据传统过失犯的认定路径:客观层面的事实因果关系(条件说)+主观层面预见可能性有无(预见可能性判断)应当如何解决[15]。
首先,就客观层面事实因果关系的判断而言,条件说认为当人类驾驶员开启L4~L5级的自动驾驶模式后自动驾驶汽车就完全脱离人类掌控,因果流程上的引起与被引起的效果只及于自动驾驶汽车,当其因自身系统故障导致了交通事故时,在条件因果的追溯上只能归责于自动驾驶汽车本身,可是正如前文所述弱人工智能时代的智能体并不具备犯罪的主体地位,归责给自动驾驶汽车并不具备任何实质意义。
其次,就主观层面预见可能性而言,自动驾驶汽车从研发试验到实际上路要历经无数次测验,就算投入运行也仍然会定期检查和维护,人类驾驶员在购买或者使用该智能驾驶汽车时有充分的理由信赖该智能驾驶汽车具有安全可靠的适航性,并且对智能系统的“算法黑箱”并不知情,因为通常情况下销售者和生产厂家都会夸大宣传的效果,隐瞒车辆缺陷,因此原则上人类驾驶员或者车辆的实际控制者在预见可能性上是极低的。
例如,前文所举的Uber自动驾驶汽车致人死亡的案件,根据警方调查资料显示受害人在被撞倒之前,汽车的智能系统已经检测到受害人的存在,但奇怪的是系统将其识别成“不明物体”之后又经历了“另一辆车”“缓慢移动的一辆自行车”的过程,此时车辆距离被害人太近已经错过了紧急制动的时机,车内人类驾驶员事发前也并未注意到前方行人而采取抢救措施,显然多方原因的聚合最终导致了受害者死亡的结果,因此在车辆开启的自动驾驶模式下由系统识别后进行自主决策的驾驶行为定性成为本案的关键。
在高度自动驾驶模式下,基于智能系统“算法黑箱”的异常介入致使因果关系发生偏离,根据传统过失犯的归责模式既无法对车辆归责也无法对车辆上的人类驾驶员归责,那么车辆发生的法益侵害后果就没有人承担了吗?还是说可以通过对现有刑法教义学知识进一步整合分析发掘一条妥善解决的路径更具可行性?此外,智能汽车的制造者、开发设计人员、销售者在这场归责谜团的背后又扮演什么样的角色,也成为我们当下需要进一步思考和解决的问题。
三、自动驾驶汽车交通肇事归责困境的刑法应对
正如爱因斯坦所说:“科学决不是也永远不会是一本写完了的书,每一项重大成就都会带来新的问题。”但是如果因为科技所带来的风险而阻碍我们不断前进的步伐,那么我们灿烂的人类文明可能就停步不前。以自动驾驶汽车为代表的人工智能的发展也不例外,想要其既与现有社会制度、法律体系有机协调,又能消融科技创新带来的风险,那我们就需要发挥人类的智慧妥善解决问题,在刑事法律上对自动驾驶汽车交通肇事归责路径的处理具有以下进路。
(一)教义学维度下传统刑法归责路径的改进方案
前文述及,自动驾驶汽车场景下“算法黑箱”引发的因果归责存在适用困境,以“结果预见可能性”为逻辑起点的传统过失犯的归责模式仍不免落入故步自封的境地,因此,从客观理性的方向出发,摆脱传统观念的束缚,重新对自动驾驶汽车交通肇事归责问题进行思考,通过教义学层面的分析和厘定,寻找一条具有可行性的解决方案。
1.新过失论的尝试
有鉴于旧过失论的局限,新过失论在以预见可能性为逻辑起点的基础上加入了结果回避的义务,即“即便具有预见可能性,但倘若履行了结果回避的义务,则不成立过失犯罪”[16]。有学者主张在新过失论下,需要考察自动驾驶场景下相关主体客观注意义务(6)该学者认为的客观注意义务是以客观的预见可能性和客观的结果回避可能性为基础。和主观注意义务(7)该学者认为的主观注意义务是以主观的预见可能性作为判断核心与行为人的预见能力关联。的违反情况,客观注意义务以交通法规所确立的禁止性规范为判断依据,主观注意义务则需要结合行为人事故发生时身体、心理、知识、经验、车辆自身的数据状况等综合判断,对于不同的责任主体分别归属不同责任[17]。
具体来说,从客观注意义务内容来看,遵守交通法规所确立的禁止性规范是判断是否违反结果回避义务的重要内容,在人工智能场域下,关于智能汽车引发的交通事故责任可以通过智能车辆技术参数、测试标准、驾驶人员的资质、驾驶系统决策指令等判断是否达到上路资格以及在正常行驶过程中是否违反交通安全法规等行政取缔性规范,如相关研发设计人员在设计之初就已经知晓该技术存在无法解决的缺陷,并且在测试试行阶段已经表现出明显的故障倾向,可能会发生交通事故的,那么设计人员具有回避义务却未履行的,就应当认定其违反客观的注意义务。
从主观注意义务内容来看,仍以主观的预见可能性作为判断的核心要素,因为就新过失论而言,结果的预见可能性是结果回避义务的前提条件,没有结果预见义务就没有结果回避可能性[18]。而预见能力涉及具体行为人的主观判断问题,理论上存在主观说、客观说、能力区分说等,该学者认为能力区分说能够具体情况具体分析,对于智能汽车背后的制造者、设计者、驾驶者分别归责,更能适应人工智能自动驾驶情景下行为人的特殊情况。
对于自动驾驶汽车交通肇事的归责问题,新过失论的主张虽然提出了一定的解决思路,但仍然存在以下有待思考的地方:
首先,在客观注意义务中尽管新过失论中加入了结果回避可能性的判断,可是判断的逻辑仍然从预见可能性出发,以预见可能的大小来决定结果回避的高低,并没有脱离传统过失犯理论的束缚,如果仅是车辆非核心的技术差异造成的事故,那么该理论可能还存在一定的适用空间,但是如果拿来解决自动驾驶系统“算法黑箱”的归责难题,新过失论与传统过失论并没有实质的区别,仍然无法处理自动驾驶系统“算法黑箱”的归责难题。
其次,假设在L4~L5高度自动化的驾驶模式下,车辆使用者具备安全监管的注意义务,可是能否在发现事故的第一时间车辆切换给人类接管,以及人类接管后是否来得及控制车辆避免事故发生,这些都难以确定,那么此时车辆使用者的这种安全监管的义务是否达到了刑法上可归责的程度,笔者对此存有疑问,因为此时车辆使用者的结果回避可能性极低,一系列紧急制动可能超出了一般情况下车辆使用者自身能力的范围,强行归责的话会扩大处罚范围,违反刑法谦抑性的原则。
最后,现在还面临的特殊情况是自动驾驶汽车是由智能系统全面操纵,而车辆使用者仅是设定完程序然后坐在座位上,就此等情况而言,其实先前的人类驾驶员的角色已经转变为乘客,那么自动驾驶汽车上使用者的注意义务是否等同于常规情况下的人类驾驶?或者在自动驾驶情景下使用者的注意义务发生下降、转移,车辆本身分担了使用者部分或全部的注意义务,但分担了注意义务后的责任如何分配?这些问题新过失论也并没有解决。
2. 客观归责理论的应对
与新、旧过失论不同,客观归责理论以其在风险领域的支配性判断为逻辑起点,以行为人是否偏离注意义务的行为作为判断依据,绕开预见可能性的理论障碍,对法所不允许的风险的创设与法所不允许的风险的实现进行具体判定,以规范归责的模式尝试对自动驾驶汽车交通肇事的归责空白提出应对方案。
(1)风险的创设
在客观归责理论下解决自动驾驶汽车的归责问题,前提性的要件是确定在自动驾驶情境下该智能车辆的实际控制主体到底是谁,这是风险管辖领域的支配性判断,因为只有在落实清楚车辆的控制权后,才能进一步判断车辆的实际控制主体是否履行了注意义务。对自动驾驶汽车场景下车辆的控制权问题,学界存在“支配义务理论”和“控制权困境”的冲突,以洛曼教授为代表的支配义务理论者认为“驾驶员是车辆的实际控制者并享有支配义务,因此在使用自动驾驶汽车L4级以上时,均应当履行支配义务”[19]。显然该观点夸大了驾驶员的能力,忽视了自动驾驶汽车的智能技术特征,车辆在设定好L4级以上自动驾驶的模式下,驾驶员已经不再实质参与驾驶操作,其驾驶的主体资格已经被虚化,如果让使用者承担超过其管辖范围的注意义务或支配义务,那么不仅会出现法律强人所难的情况,还会不当扩张刑罚的处罚范围。对此,希尔根多夫提出“控制权困境”理论,即“在发生事故时应当判断是否违反了注意义务,此外在考虑弥补处罚空白的同时,应当承认在路况良好、自动驾驶持续正常运行的状态下,自然人驾驶者的注意义务随之消失”[20]。笔者一定程度上赞同该学者的主张,该学说进步之处在于没有将风险控制领域完全归属于汽车使用者,而是承认开启了自动驾驶模式后,车辆本身全部分担了原本属于人类的注意义务。前文已述,智能汽车本身是无法作为责任主体承担刑事责任,那么自动汽车驾驶系统的研发、设计人员以及生产制造厂商应当承担哪些注意义务?
自动驾驶汽车生产者(包括程序设计者)的注意义务,作为车辆的制造者天然应当对其所生产出来的产品具有质量保障义务,比如严格依照国家、行业标准对车辆状况进行检查、测试、保养、维护、召回等。此外,程序设计者作为汽车生产的关键环节,应当保证程序算法的准确、数据安全以及行为指令的正确性等。如果违背了上述注意义务并偏离了注意义务的行为基准,那么就属于制造了法所不允许的风险[21]。
(2)风险的实现
注意义务的违反说明行为存在法所不允许的风险,但风险如何现实化还需要对违反注意义务和损害结果的发生进行规范判断。因此从合义务的替代行为出发,以其避免结果发生可能性的高低所带来的风险升高程度,在自动驾驶场景下对自动驾驶所有相关的责任主体进行风险检视。
对于车辆使用者来说,当其开启自动驾驶模式并在正常路段运行时注意义务确实转移给车辆本身,但是在实际路况并不适合开启自动驾驶模式或者驶入的道路标识设置缺失,道路指示灯、引导性标志存在障碍的情况下,使用者就应当及时切换或关闭自动驾驶模式,人为降低车辆独立运行的驾驶风险,如果汽车使用者能介入但未介入,这种情况下就存在行为人合义务的替代行为,此时风险发生提高,再结合事后查明的事实,如果汽车使用者及时介入操作虽不能确定地避免结果的发生,但只要结果发生的概率在50%以上,我们就可以认定行为人违反了注意义务并实现了法所不允许的风险,对车辆上的使用者进行过失归责[21]。
对于自动驾驶汽车的生产者(包括程序设计者)而言,并非在汽车生产销售后意味着责任的终结。自动驾驶汽车作为一种可能严重危及人身安全的产品,研发及生产者应当避免其生产的产品存在缺陷,在汽车自动驾驶过程中因“算法黑箱”自主决策导致了法益损害后果,能否就认为属于产品缺陷而直接追究生产及研发者的责任,笔者认为需要再进一步分析:
首先,根据智能系统的设计特点,能否用其他算法技术规避掉这个“算法黑箱”漏洞,如果技术的进一步发展可以重设或绕过“算法黑箱”,那么归责问题迎刃而解。
其次,如果不能解决,那么下一步我们需要知道“算法黑箱”发生异变的概率,即当其具有高概率、多发性(8)这里的高概率、多发性需要人工智能领域综合多方面数据、资料研判确定。而生产及研发人员在实验测试阶段就已经意识到时,未采取合义务的替代行为,仍然为了追逐利益,如为收回投入成本与研发宣传费用等外在因素继续使用从而使得风险继续现实化,那么应当追究生产方及研发人员的过失责任。
在这里,还需要注意的是我国刑法上并不承认共同过失犯的理论,但作为产品的研发和生产者必然不可能是一个人而是一个团体,若不将共同过失犯作为共同犯罪论处,那么就会出现因无法查明具体人员的过失行为而导致罪疑惟轻,最终将行为人按照无罪处理的结果发生。
最后,如果“算法黑箱”发生异变的情况具有偶然性和低概率性,那么即使生产和研发人员有所认识,但也没有办法杜绝和科学地解决,在此种意义上并不存在合义务的替代行为,“算法黑箱”发生异变的风险就像是空中航行的飞机一样虽然安全可靠,但是总会出现不可预知的意外。
(二)智能因果关系之探究
1.疫学因果关系理论的启发
在传统因果关系理论中,因果性的判断以科学法则为基础,但随着风险社会的到来,环境污染、传染病、食品安全等公害案件的增多,这部分案件的因果流程呈现出隐秘性、间接性、多因性以及不确定性等特点,因此想要以传统因果判断基准为依据解决公害案件的归责问题便困难重重[22]。为解决这类案件的归责问题,以日本为代表的大陆法系国家引入了疫学因果关系理论,根据日本学者的观点疫学因果关系是疫学上所采用的因果认识方法,对某因子与疾病之间的关系,因为不能够从医学、药理学等方面得出明确的因果关系,而试图以数据统计观察某种因子与疾病结果之间存在高度盖然性从而去推定因果关系的存在。[23]
和公害案件类似,自动驾驶汽车交通肇事的案件与其具有同样的归责困境,即自动驾驶汽车智能系统自主决策的“算法黑箱”其实与公害案件诱因的隐秘性、多因性一样都是因果流程环节中异化的一环,我们从科学的途径无法得知或者说人类的智慧尚且达不到解决该问题的程度,既然疫学因果关系可以通过数据统计来推定因果关系的存在,那么此时仿照疫学因果关系的理论,构造仿生出专门解决自动驾驶汽车等人工智能所引发的过失犯罪也未尝不具有一定可行性,简单来说,就是在疫学因果关系理论的基础上进行改造,借用疫学四原则(9)第一,该因子在发病前的一段时间已经发生作用;第二,该因子的作用程度越明显则疾病的发生率越高;第三,根据该因子的发生、扩大等情况作的疫学观察记录,能说明流行的特性,而没有矛盾;第四,从该因子为原因的发生机制上可能予以生物学的说明而不发生矛盾。的分析原理和定量分析的计算方法,用数学公式表达出影响因子和危害结果之间的参数值,当该数值超过80%达到高度盖然性[24],我们可以推测认定影响因子和危害结果之间存在事实上的因果关系,对此我们将这种改造后的因果关系理论称为智能因果关系理论(10)智能因果关系理论的概念和设想源自卢有学,窦泽正.论刑法如何对自动驾驶进行规制——以交通肇事罪为视角[J].学术交流,2018(4):73-80。,不过为避免不当扩大刑罚的处罚范围,这种智能因果关系理论只能用于消极判断,作为人工智能因果关系判断的最后手段[4]。
2.构建智能因果关系理论的可行性分析
首先,在理论层面上,创设智能因果关系理论具有可行性。因为智能因果关系理论依靠数据定量分析的计算方法同时遵循“高度存疑即可罚”的理念,并不需要存在特别明确的自然法则意义上的因果关联,因此,在面对类似于自动驾驶汽车等人工智能产品所带来的风险而刑事理论体系无法解决因果归责问题时,可利用智能因果关系计算影响因子与引起损害后果的概率值,从而判断因果关系的有无。有学者认为“与‘造成’型因果相比,‘概率提升’型因果突出的优势在于,可适用于行为人的行为因素与其他的作用因素无法相分离,科学上无法证明行为与结果之间存在条件关联性的场合,令条件公式束手无策的累积型因果案件,若按‘概率提升’型因果的原理来处理,其归责难题便迎刃而解”[25]。笔者认为,智能因果关系理论可作为特殊的因果关系判断方式而对传统因果关系理论进行一定的补充,这从理论创新与发展的角度来说具有一定的必要性。
其次,在技术层面上,对于自动驾驶汽车智能系统“算法黑箱”所导致的归责困境,智能因果关系理论也可以依靠现代信息技术做好数据收集准备,如有的研究者已经实验成功在人工智能产品中安装数据记录器(俗称“黑匣子”)全程无间断地记录人工智能产品中的各项数据,在出现产品事故后,可以调取和还原事故发生时的所有数据,帮助技术人员记录产品中的异变因素。此外,智能因果关系从新的逻辑和规则出发,利用算法辅助理解算法(11)搭建测试分析系统利用算法辅助理解算法,是当前技术人员破解“算法黑箱”的手段之一。该概念和计算机理论来源于张吉豫.打破人工智能算法黑箱[M]//让法律人读懂人工智能.北京:法律出版社,2019:377-383。,建立贝叶斯网络理论模型(12)贝叶斯网络理论模型是美国计算机科学家和哲学家朱迪亚·珀尔提出并研发,主要用于研究不确定性的因果关系,贝叶斯网络包括三个核心概念,即有向无环图、条件概率表和马尔可夫条件。和结构因果模型(13)虽然贝叶斯网络在因果关系分析中能够发挥重要作用,但它无法准确解释因果关系,为了提升对因果关系描述的精准度,珀尔提出了因果关系的数理框架——结构因果模型。,用来分析和描述因果关系,这两种模型和数据算法可处理因果流程中存在的潜在信息和干扰信息,最终得出的分析结果可用于刑法学层面,为其解决人工智能、机器人犯罪等因果追溯难题,因此引入智能因果关系在技术支撑上也具备可行性。
我国有学者认为“在风险社会,科学技术手段的发展所造成的错综复杂的难题使得因果关系不可能再单纯运用科学的因果法则加以证实,传统的因果关系理论在认定犯罪时的作用也逐渐减弱甚至归于消灭,归责标准则必须被重新构建”[26]。而智能因果关系理论无论是在理论的创新上,还是技术的支撑性上都拥有其自身的优势和特色,在解决未来风险社会(智能社会)的刑法问题上不失为一种“蹊径”。
(三)不同主体刑事责任的承担
上文对自动驾驶汽车交通肇事可能的归责路径进行了探析,但是责任的具体落实仍然要回归到刑法罪名的认定上,因此根据不同的角色分工存在以下几种不同的认定情况:
1.车辆使用者
在本文探讨的L4级别以上的高度自动驾驶模式下,需要先明确的是此时的车辆使用者的责任角色即车辆的使用者究竟是驾驶人员、监管人员,抑或是乘客?
首先,如果车辆的使用者属于驾驶人员,那么关于驾驶人的刑事责任可以适用《中华人民共和国刑法》第一百三十三条规定的交通肇事罪和危险驾驶罪,结合这两个罪的构成要件具体分析,对交通肇事罪而言构成本罪的前提是需要驾驶人违反交通运输管理法规;对危险驾驶罪而言构成本罪的前提是需要满足四种特定的危险驾驶形式(14)四种特定的危险驾驶形式即包括追逐竞驶、醉酒驾驶、超速、从事校车业务或者旅客运输超载以及违反危险化学品安全管理规定运输危险化学品危及公共安全的。,但是在本文探讨的L4级以上的高度自动驾驶模式下,汽车使用者并不等同于传统意义上的驾驶员,使用者只能启动汽车、设定目的地而不能干预车辆的正常行驶,汽车的智能驾驶系统取代了驾驶员对道路状况、紧急情况的预判与制动,此时车辆使用者的角色定位更贴近于乘客。再者,即使要求车辆的使用者在使用车辆前有审慎的检查、保养、维修等义务,但未尽到此类义务更多属于管理过失而非违反交通安全法规的交通肇事罪,同样在行为类型上也不符合危险驾驶罪的入罪形式。
其次,L4级别以上的高度自动驾驶模式使用者的警觉接管义务并不明确,按照《中华人民共和国道路交通安全法》(以下简称“道路交通安全法”),并未规定使用者的此类警觉接管义务,但是2017年德国《道路交通法》(stvg)中对使用者的权利与义务提出了较高的要求,其中就包括了危急状态下的警觉接管义务(15)德国《道路交通法》中规定在自动驾驶系统接管车辆的情况下,使用者可不对交通状况和车辆进行监控,但仍然要时刻保持清醒戒备的状态随时接管,在自动驾驶系统向使用者发出请求以及使用者自我发现系统故障时,都应当立刻接管车辆。。笔者对此并不赞同,因为警觉义务的增加不仅会导致使用者过多地承担原本属于生产者的责任,也会违背技术增加人类福祉的目的。此外,其他反对的理由还包括以下几方面:第一,根据自动驾驶汽车自动化等级的描述,使用者具备的警觉接管义务应当是集中在L3层级,原因是在L3有条件的自动驾驶模式下保留了人类驾驶员的操作空间,紧急情况下使用者(驾驶辅助人)可以对车辆进行接管。以特斯拉Model X为例,该类车型属于L3级别有条件的驾驶自动化,其智能系统要求使用者每隔几秒钟必须触摸方向盘一次,以便紧急情况下,使用者能够做到无迟延的接管车辆,而与此相反L4级别以上的车辆控制权并不在使用者手中,智能系统并没留给使用者可以插手操纵的空间,如果此时仍然强行附加警觉接管的义务,那么使用者在操作可能性上微乎其微。第二,基于信赖原则,使用者在市场上购买到L4级别以上的自动驾驶车辆,必然是相信其已然具备“解放双手”、安全高效、无负担的产品价值,此时如果仍然要求具备警觉接管义务,使用者在驾驶过程中的所承担的负担并不比普通汽车少反而更高,那么购买产品的初衷与科技进步给人带来的便利效果岂不就南辕北辙了。
但为讨论的完整性,我们仍区分两种不同的情况对待:其一,当前我国《道路交通安全法》并没有增加警觉接管义务,使用者日常的审慎义务仅是保证自动驾驶汽车安全运行的管理职责,那么使用者就不适用交通肇事罪和危险驾驶罪,而应当成立过失犯罪诸如过失致人重伤、死亡罪等;其二,如果未来我国道路交通安全法规类比德国的法规增加了警觉接管义务,那么作为自动驾驶汽车的使用者就理应承担交通肇事罪的刑事责任。
2.车辆生产者
对于车辆生产者的刑事责任应当贯穿生产和应用两个阶段,但是否对生产者适用严格责任仍留有争论,严格责任确立的目的之一就是保护社会重大的公共利益,对某些行为在客观上导致了危害结果,但行为人并不具备主观罪过的情形,为达到不放纵犯罪的目的,在实体法中只强调客观行为及后果而对主观罪过要件不做规定[27]。一方面有学者认为在生产阶段生产者对自动驾驶汽车这一产品的诞生起到完全支配和控制作用,对生产者适用严格责任可以强化安全意识、提高产品质量并提前为应用阶段可能出现的情况做好应急预案;另一方面科技的进步受制于时代的局限,当生产者面临无法解决的技术缺陷如“算法黑箱”的存在,适用严格责任反而会过度苛责研发人员,不利于新兴技术的进步,此外,产品应用阶段的情况复杂多变,不排除超出研发人员预期以外的事故肇因,同样对此适用严格责任的话也会出现法律强人所难的情况。
自动驾驶汽车的生产者不同于以往传统的汽车生产者,其所生产的自动驾驶汽车兼具传统汽车组件基底与人工智能指挥系统的双重特点,而传统汽车组件产品自始具有严格的国家、行业标准,因此如果生产者是在普通的机械组件上违反安全生产标准,那么完全可以按照生产、销售不符合安全标准的产品罪或者生产、销售伪劣产品罪处罚,复杂的是作为核心技术的人工智能系统,其中就包括了“算法黑箱”这一当前无法解决的技术黑洞,那么对于“算法黑箱”的存在是否会成为生产者逃避追责的有利借口?如果不是,那么生产者在整个自动驾驶汽车交通肇事的过程中应该承担何种责任?
首先,笔者认为应当对“算法黑箱”在法律上的属性进行定位,就其产生的原因和异化的概率,我们应当认定它是属于一种技术风险。根据刑法中被允许的危险的法理,这种现代智能技术进步所附带的技术风险,能否阻却刑法上的归责还需要“行业内普遍接受的技术规则”安全标准的检验,如果智能车辆通过了这种检验标准,那么就具备了规范的符合性和阻却刑事责任的可能性,人类或者说社会就应当承担技术进步的过程中所必然蕴含的代价,因为科技不可能永远是安全的,正如第一次工业革命所诞生的火车、轮船,第二次工业革命诞生的汽车、飞机。以飞机为例,从实验起飞到试飞成功再到飞机的产业化发展,这一过程除了所付出的经济代价外,还包括了多少已经牺牲的飞行员和乘客的生命,假如当第一起飞行事故发生后,立法者就适用严格责任严惩并叫停整个产业,那交通工具的更新换代如何实现?又会有谁冒着刑事责任的风险为全人类的发展谋福利?我们不能因噎废食,正如我们不可能为了避免交通事故的发生就禁止汽车上路一样。所以“算法黑箱”并不是生产者逃避责任的理由,它虽然可以作为被允许的风险存在,但要受到行业内技术标准的检验和限制。
其次,从主观故意的角度出发,对“算法黑箱”研发人员主观上明知存在“算法黑箱”且其在一定概率上可能会引发事故,能否认定研发人员具备刑法上的故意?笔者认为,应当从故意的本质出发进行分析,在认识因素上研发人员对自己所制造的智能系统可能会发生危害社会的结果确实具备一定的认识,但这种认识是建立在算法数据推理的基础上,并且是以一种极低的偶发性形式存在,从理论构想转化成现实科技,技术本身的转化风险必然不可能为零,那么在极低的概率性下容忍科技现实化所带来的社会危害是时代进步和发展的需要;另外,在意志因素上,研发人员也必然不会对“算法黑箱”持听之任之的态度,除了技术上不断攻坚克难,程序上也必然极力降低“算法黑箱”异变的概率,因此从意志因素与认识因素相统一的角度上排除刑法上犯罪故意的存在。
综上所述,笔者认为对于“算法黑箱”这类技术风险,如果车辆的生产者对其生产的自动驾驶汽车符合了行业安全标准的检测且研发人员不存在故意利用“算法黑箱”的犯罪故意,那么我们是无法进行刑法上定罪处罚,反之可以作为普通的民事侵权案件通过民事上的强制保险、赔偿基金等方式进行私力救济。当然,如果有别有用心的研发人员故意利用自动驾驶汽车的智能系统缺陷进行犯罪,那么也可能构成侵犯计算机信息系统罪或者特定的故意犯罪类型。
3.车辆销售者
作为流通链条的重要一环销售必不可少,那么销售者具有在运输、仓储等过程中妥善保管自动驾驶汽车的谨慎义务,同时在出售产品的过程中也应准确告知产品规范操作流程和风险事项,并在发现产品缺陷时协助制造商紧急召回等义务,如果销售者明知生产者生产的商品存在缺陷或者不符合国家行业标准继续销售的,同样构成销售不符合安全标准的产品罪或销售伪劣产品罪。
四、结 语
自动驾驶汽车归责困境下的突围之战,要求我们以教义学的思维和创造性的路径开辟新的战场,在享受人工智能技术发展所造就的旖旎幻想时切不可迷失方向,返璞归真以最踏实、严谨的态度回归学术理性之路,毕竟“人工智能并未对法律基础理论、法学基本教义提出挑战,受到挑战的只是如何将传统知识适用于新的场景”[8]。
