基于机器视觉技术的船桥防碰撞自动控制系统
2023-05-04金媛媛
杨 明,韩 旭,金媛媛,刘 露
(沈阳城市建设学院 信息与控制工程学院,辽宁 沈阳 110167)
0 引 言
航运行业未来的发展趋势之一是船舶自动控制,仅采用人员驾驶的方式无法适应航运业未来的发展[1]。目前桥梁数量不断增长,建设桥梁虽然解决了陆上交通问题,但却提升了船桥碰撞事故的发生概率[2]。导致船桥碰撞事故发生的主要因素是人为失误。设计船桥防碰撞自动控制系统,是解决这个问题的主要手段[3]。陈卓等[4]设计一种小型船桥防碰撞自动控制系统,通过基于栅格地图的权值FMM 法,完成全局船桥防碰撞控制;过基于VO 模型的方法,完成局部船桥防碰撞控制。该系统在开阔的水域中进行了船桥防碰撞试验,证明其具备一定的可行性与可靠性。但该系统并未考虑风力与水流等环境因素,对船桥防碰撞自动控制效果的影响,在存在外界干扰情况下,该系统的控制效果较差,无法确保船舶安全航行。罗贤程等[5]利用动态分阶势场法,设计船桥防碰撞自动控制系统,通过动态分阶势场法,构造船舶航行环境模型,形成航行控制指令,自动控制船舶航行。该系统在不同船舶航行环境下,均可完成船桥防碰撞自动控制。但该系统建立的环境模型存在一定的不确定性,导致系统输出和实际输出存在偏差,降低船桥防碰撞自动控制的实时性,并存在抖动问题。机器视觉是通过计算机完成客观三维世界的信息采集与决策控制。机器视觉技术包含结构光视觉与双目视觉2 种类型,其中,双目视觉通过2 台摄像机采集目标信息,根据人眼左右视差原理,并进行坐标转换获取目标的位置信息。在船桥防碰撞自动控制中,应用机器视觉,可实时获取船舶航行环境信息与位置信息,提升自动控制的实时性。为此,设计基于机器视觉的船桥防碰撞自动控制系统,降低船桥碰撞事故发生概率。
1 船桥防碰撞自动控制系统
基于机器视觉技术的船桥防碰撞自动控制系统结构如图1 所示。双目视觉传感器负责实时采集船舶航行的环境图像,初始化A/D 转换芯片,通过A/D 转换芯片对船舶航行环境图像进行预处理,利用双目视觉测距技术结合预处理后的船舶航行环境图像计算船舶与桥墩间的距离,并利用GPS 实时采集船舶的位置信息。CPU 利用改进差分算法优化PID,根据船舶与桥墩间的距离、船舶实时位置信息得到船舶舵角自动控制结果,Avalon 总线负责传输船舶舵角自动控制结果至UART。通过UART 根据舵角自动控制结果,生成自动控制指令,作用于船舵,完成船桥防碰撞自动控制。存储器控制模块负责控制存储器存储船桥防碰撞自动控制结果。利用LCD 驱动模块生成LCD 的显示驱动时序,由LCD 呈现船桥防碰撞自动控制结果。

图1 船桥防碰撞自动控制系统结构图Fig.1 Structure diagram of automatic control system for bridge anti-collision
1.1 船舶航行环境图像采集的双目视觉传感器
利用双目视觉传感器,实时采集船舶航行过程中的环境图像信息,其结构如图2 所示。通过内存仲裁器将双目摄像机与主处理器连接到一起,负责将船舶航行环境图像信息采集指令传输至双目摄像机,并将采集的环境图像信息传输至处理器内。通过同步时钟确保双目视觉传感器内各单元能够同步进行。射频数据接口负责接收船舶航行环境图像信息采集指令,并发送采集结果至A/D 转换芯片内。通过电源单元为双目视觉传感器提供电源。利用稳压器维持电源单元的恒定电压。采用解调器与调制器将采集的船舶航行环境图像信息,转换成可传输的模拟信号。在数据总线、地址总线与控制总线内添加20 Ω 的匹配电阻,提升船舶航行环境图像信息采集质量。
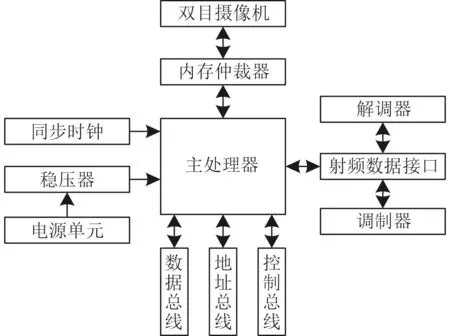
图2 双目视觉传感器结构图Fig.2 Structure diagram of binocular vision sensor
1.2 基于双目视觉测距的船舶与桥墩间的距离计算
视觉处理器中,利用双目视觉测距技术,根据采集的船舶航行环境图像,计算船舶与桥墩间的距离。利用双目视觉传感器采集的2 幅船舶航行环境图像属于共面,同时行对齐的。物理世界中桥墩位置点Q,采集船舶航行环境图像成像点是ql=(Xl,Yl)与qr=(Xr,Yr),Q在2 幅船舶航行环境图像中存在一样的像素纵坐标Y,即Y=Yl=Yr,对应的像素横坐标是Xl与Xr。双目视觉传感器焦距为s,双目摄像机基线宽度为A,通过Xl与Xr获取两图像间的视差D=Xl-Xr,根据D计算船舶与桥墩间的距离为:
1.3 船桥防碰撞自动控制方法
CPU 中利用改进差分进化PID 控制方法,建立改进差分进化PID 控制器。在该控制器内输入船舶与桥墩间的距离误差、航迹误差与航向误差,输出船舶舵角自动控制结果,完成船桥防碰撞自动控制。船舶与桥墩间的实际距离为Z′,船舶与桥墩间的距离误差为ΔZ=|Z′-Z|。船舶在桥区水域航向时,会受到风力与水流等外界环境因素的影响,导致船舶航向出现偏差,为此需要计算船舶航向偏差,输入改进差分进化PID 控制器内。船舶的期望航向为:
其中:a为船舶过桥转向时的纵向尺度;t时刻,(x(t),y(t))为GPS 实时采集的船舶当下位置坐标;(Xˆ(k+1),Yˆ(k+1))为航线上的航路点k+1 坐标。
因此,航向偏差Δθ=|θ′-θ|,θ′为实际航向。航迹误差的计算公式如下:
在h>0情况下,说明船舶航迹偏右,需自动控制左舵;否则自动控制右舵。
改进差分进化PID 控制器输入的综合偏差为:
其中:ΔZ,Δθ,h加权系数是w1,w2,w3。
改进差分进化PID 控制器输出的舵角自动控制结果为:
其中:Gp,Gi,Gd为比例系数,积分常数,微分常数。
利用改进差分进化算法,优化PID 控制参数Gp,Gi,Gd的目标函数为:
其中:t′为上升时间;ω1,ω2,ω3为e(t),ρ2,t′的权重。
2 实验结果分析
以某桥区水域为试验对象,该桥区水域内共包含8 个航路点,船舶在静水与干扰环境情况下,经过该部分桥区水域时的环境参数如表1 所示。

表1 船舶航行的环境参数Tab.1 Environmental parameters of ship navigation
本文系统可有效采集船舶在桥区水域的航行环境图像,为船员提供清晰的船舶航行环境信息,为后续计算船舶与桥墩间的距离提供数据支持。
利用本文系统计算船舶航行过程中,船舶与桥墩间的距离,计算结果如图3 所示。可知,本文系统可有效计算不同船舶航行环境时,船舶与桥墩间的距离。随着时间的延长,2 种航行环境下,船舶与桥墩间的距离均不断缩短。在静水环境下,船舶运行至12 s时,船舶与桥墩间的距离最近;在干扰环境下,船舶运行至14 s 时,船舶与桥墩间的距离最近。干扰环境下船舶与桥墩间的距离略大于静水环境,因为干扰环境下影响因素较多,所以船舶与桥墩间的距离需要较大,才能避免发生船桥碰撞事故。

图3 船舶与桥墩间距离计算结果Fig.3 Calculation results of distance between ship and pier
在静水环境下,利用本文系统对该船舶进行船桥防碰撞自动控制,分析本文系统优化前后的自动控制效果如图4 所示。根据图4(a)可知,本文系统优化前可有效完成船桥防碰撞自动控制,但舵角的抖动频率较高,导致自动控制的稳定性较差;根据图5(b) 可知,本文系统优化后,舵角的变化曲线较为平滑,且无抖动情况,自动控制的稳定性较强。试验证明,本文系统可有效自动控制船舶舵角,提升船桥防碰撞自动控制的稳定性。

图4 优化前后的船桥防碰撞自动控制结果Fig.4 Automatic control results of bridge anti-collision before and after optimization
在不同航行环境下,经过本文系统自动控制后的船舶航迹如图5 所示。可知,在2 种船舶航行环境下,经过本文系统控制后的船舶航迹均与实际航迹相差较小,其中,干扰环境下的船舶航迹误差略大于静水环境;2 种环境下船舶与桥墩间均无碰撞危险。试验证明:在不同船舶航行环境下,本文系统均可完成船桥防碰撞自动控制,且自动控制精度较高。

图5 自动控制后的船舶航迹Fig.5 Ship track after automatic control
3 结 语
为确保船舶在复杂桥区水域情况下,能够保持正常航行秩序,安全抵达目的地,需采用合理的自动控制方式。为此,设计基于机器视觉技术的船桥防碰撞自动控制系统,精准自动控制船舶航行轨迹,提升船舶航行安全性,为船舶顺利完成运输与救援等任务提供保障。
