AMT硬件在环仿真测试研究
2023-04-26王德军于双飞孙梦琪毕国栋许成林
王德军 于双飞 孙梦琪 毕国栋 许成林

【摘 要】本文首先阐述基于dSPACE实时仿真系统构建的传统的AMT物理模型,主要包括发动机模型、离合器模型、变速器模型、车辆动力学模型等,然后基于此硬件在环系统验证TCU的主要控制功能能够满足软件测试需求,通过该系统能提前发现潜在问题,降低控制器开发成本。
【关键词】硬件在环;dSPACE;TCU;AMT
中图分类号:U463.6 文献标志码:A 文章编号:1003-8639( 2023 )04-0069-03
【Abstract】In this paper,a physical model of AMT was constructed based on dSPACE real-time simulation system,including engine model,clutch model,transmission model,vehicle dynamics model,etc. in order to obtain more close to the real vehicle vehicle dynamics simulation model. Based on this hardware in the loop system,the main control functions of TCU are verified,which can meet the needs of software testing. Through this system,problems are found in advance,and the cost of controller development is reduced.
【Key words】HIL;dSPACE;TCU;AMT
AMT(Automatic Mechanical Transmission)变速器在MT基础上加装自动离合器和自动选换挡执行机构,具有自身传动效率高、结构简单、制造成本低、继承性好等特点,且能够改变传动比,扩大驱动转矩和转速的变化范围,使得发动机能够工作在高效区降低油耗,在市场得到广泛推广[1]。但是,其在换挡过程中,离合器分离会出现动力中断的现象,TCU对离合器控制过快过慢都会影响驾驶员感受,在调速过程中,发动机转速或输入轴转速控制不准也会造成同步器或啮合套顶齿或打齿问题[2]。本文基于dSPACE的SCALEXIO实时仿真系統在Matlab/Simulink搭建AMT的HIL模型,通过Configuration Desk软件生成sdf.文件,在Control Desk软件进行测试和验证AMT控制功能,能够有效加快研发进度。
1 HIL工程准备
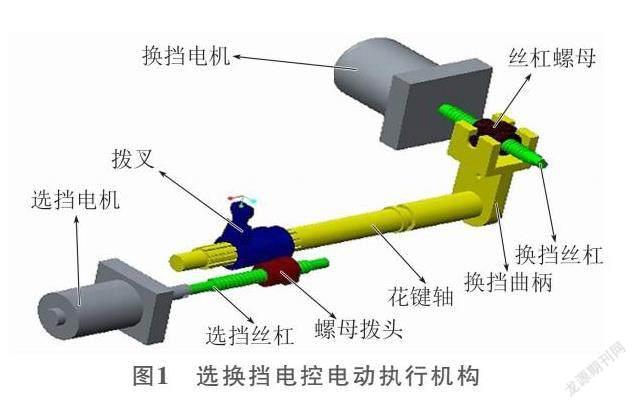
本论文以某款TCU控制器硬件在环测试为例,其电控电动执行机构如图1所示,通过H桥控制选换挡电机正反转来带动换挡丝杠,实现拔叉运动,进而完成换挡动作[3]。
在搭建HIL工程时,需要准备相关材料才能搭建HIL模型,具体如表1所示。
2 HIL闭环工程搭建
2.1 HIL测试平台搭建
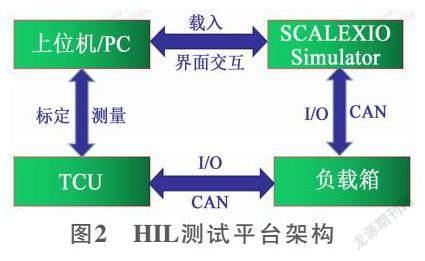
搭建基于SCALEXIO系统的HIL测试平台,包含有SCALEXIO Simulator、负载箱、电脑主机及所需测试的TCU。HIL测试平台架构如图2所示。
SCALEXIO Simulator通过网线与主机相连,通过Configuration Desk软件将在Matlab/Simulink中的HIL模型编译生成sdf.文件,通过Control Desk软件下载到SCALEXIO Simulator中运行。SCALEXIO系统相比PHS系统,具有庞大的节点数量和更灵活的I/O扩展能力,将I/O板卡与处理器板卡相互独立分开,减少处理仿真模型时等待I/O输入数据的时间。根据提供的TCU针脚定义,结合DS2680板卡的针脚搭建I/O信号列表,并通过Configuration Desk进行软硬件接口配置来实现I/O信号交互。对于TCU与发动机、仪表、换挡手柄等CAN节点的报文信号,可通过RTICANMM模块把DBC导入,建立CAN网络架构。
TCU与电脑主机通过CANape标定设备进行相连,可实时读取控制器中的信息,并对其进行标定检测来验证相关功能,通过Control Desk可以对HIL模型进行实时标定修改,并且仿真驾驶员不同操作来验证TCU的换挡功能[4]。
2.2 控制策略介绍
在搭建HIL工程时,需要熟悉TCU的控制策略,以便对TCU进行标定来实现HIL闭环。控制策略的目标是根据换挡手柄、钥匙开关等信息解析驾驶员意图,并结合发动机转速、输入轴转速、车速、目标挡位等当前车辆状态参数,通过相应的换挡策略控制发动机、离合器电机、选换挡执行机构电机等动态协调实现换挡功能[5],TCU控制系统架构如图3所示。
首先对CAN、Sensor等进行输入信号解析,提取出踏板开度、车速等车辆信息,然后对钥匙位置、换挡手柄等信号进行驾驶员意图解析,提取出R/N/D/M挡位信息,由此进行挡位决策来确定所需求目标挡位初始值。由于在换挡过程中存在新的挡位需求,所以需要同时结合当前换挡状态、道路工况来识别和判断是否需要保持或更新目标挡位初始值,得到最终目标挡位。换挡协调根据目标挡位控制发动机进入扭矩模式并发出选/换挡指令,换挡时需根据选/换挡指令来决定清扭、分离合、调速、摘挡、选挡、挂挡、合离合、升扭等不同换挡状态。挡位识别根据换挡状态、选/换挡位置信号来确定当前挡位,换挡控制根据换挡状态对选/换挡电机H桥进行控制(电机正反转和PWM)。离合器管理根据换挡状态和离合器实际位置、发动机状态、踏板开度来决定离合器需求位置和需求速度,离合器控制通过发动机转速、输入轴转速来对离合器电机进行H桥控制(电机正反转和PWM)。
2.3 HIL模型搭建
本文基于Matlab/Simulink搭建HIL模型,其架构如图4所示,主要由I/O模型、CAN模型和物理模型组成,其中物理模型搭建详略直接影响闭环调试功能和精度,进而影响软件测试完整性。
Power模型为供电控制模型,和HIL机柜的程控电源、TCU的电池电压、钥匙唤醒相关。I/O模型主要是HIL机柜和TCU的硬线接口,主要为传感器信号(输入轴转速、输出轴转速、选/换挡位置传感器、离合器位置传感器、变速器温度等)、驱动信号(选/换挡电机PWM、离合器电机PWM)、开关信号(2挡起步信号)、CAN信号(发动机、仪表、换挡手柄、变速器)。
物理模型包含发动机、传动系统(离合器、变速器)、车辆动力学模型。发动机模型用于模拟发动机的运行状态,其输入信号有钥匙上电、起动信号、发动机需求模式、需求扭矩、需求转速、发动机实际转速、油门开度,通过输入信号可以仿真发动机在待命、上电、起动中、起动完成、运行、停止中、停止等不同发动机状态,再结合发动机的外特性,可仿真TCU对发动机控制需求,进而计算出发动机净扭矩、发动机摩擦扭矩、发动机水温等输出信号。
传动系统模型为整个物理模型的关键部分,其输入包含离合器电机PWM、选换挡执行机构电机PWM、变速器当前挡位等,输出包含发动机实际转速计算、离合器位置计算、变速器输入轴转速计算、输出轴转速计算、选换挡位置计算等[6]。
车辆动力学模型为仿真轮胎的滚动阻力、迎风阻力、坡度阻力、加速阻力以及制动阻力,其输入为差速器的转速、坡度、制动开度,输出为车速、车轮阻力扭矩[7]。图5为汽车行驶阻力解析过程图。
2.4 HIL工程闭环调试
模型搭建完后,根据提供的整车、发动机、离合器、变速器参数进行模型参数化,并在Matlab中进行离线运行调试,调试通过后,再通过Configuration Desk軟件把模型和I/O接口、CAN接口生成sdf.文件,并导入Control Desk进行HIL模型的标定,其闭环测试界面如图6所示。
HIL开环调试是闭环调试基础,通过对I/O和CAN报文的测试确保TCU与HIL之间信号交互无误,从而确保控制器和被控对象之间进行正确的信号传递,再进行闭环调试,闭环调试核心是验证挡位决策和换挡时序,通过调试发动机、离合器、变速器等参数能够实现闭环,实际挡位响应需求挡位,且离合器位置、选换挡位置和实际位置变化趋势一致。换挡功能验证如图7所示。
3 结论
基于SCALEXIO的AMT硬件在环仿真及调试是一个系统工程,首先需要准备相关资料,然后在Matlab环境下搭建HIL模型,其次需要熟悉AMT的结构原理和TCU控制策略,最后才能完成整个工程闭环调试。通过实验结果分析,该系统能够满足软件测试需求,基于该系统的软件测试可以提前发现存在的问题,可大大提高研发的进度。
参考文献:
[1] 钟建军. 电控机械式自动变速器混合仿真试验台研究与开发[D]. 北京:清华大学,2017.
[2] 洪金龙. AMT起步及换挡过程的驾驶员品质优化控制[D]. 长春:吉林大学,2019.
[3] 杨进琦. 纯电动AMT电动电控换挡执行机构精确控制研究[D]. 长春:吉林大学,2020.
[4] 兰海龙,李萍,郭建群. 基于dSPACE平台的AMT硬件在环测试系统搭建[J]. 机械工程与自动化,2020(5):19-21.
[5] 王宏宇,房永,王德军. 汽车自动变速器原理及研发[M]. 北京:机械工业出版社,2014.
[6] 徐向阳. 自动变速器电控系统及其应用软件开发技术[M]. 北京:机械工业出版社,2018.
[7] 余志生. 汽车理论[M]. 北京:机械工业出版社,2009.
(编辑 凌 波)
