基于UWB技术的定位系统设计
2023-04-25王金辉
王金辉
摘要:随着定位技术的不断发展和成熟,基于位置信息的服务在各行业的应用越来越广泛。在国家及地方政府印发的相关建设要求中,建议采用超宽带(Ultra Wide Band,UWB)技術提高定位精度。基于UWB技术研发的定位系统,采用了时隙分配、下行寻址等技术,降低了无线信号碰撞的概率,解决了下行指令发送失败率较高的问题,提高了系统的可靠性,提升了企业“工业互联网+安全生产”能力。
关键词:定位;位置信息服务;超宽带;工业互联网;安全生产
中图分类号:TP391文献标志码:A文章编号:1008-1739(2023)05-62-5
0引言
随着新技术的不断发展和成熟,人们对于室内定位的需求日益增加,例如:在煤矿等突发灾难中,通过室内定位,引导救援人员以最快速度解救被困人员;2020年的疫情防控中,基于超宽带(Ultra Wide Band,UWB)定位技术的定位手环、定位标签,防止人员跨部门接触,做到人员的精确跟踪定位;在军事上,通过人员定位和设备追踪进行城市作战训练、弹药仓库管理和高级研发等[1-3]。作为近两年兴起的一种定位技术,UWB室内定位技术与传统通信技术有着极大差异。它不需要使用传统通信体制中的载波,而是通过发送和接收具有ns或ns级以下的极窄脉冲来传输数据,从而具有GHz量级的带宽。
UWB室内定位系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低以及能提供高精度定位等优点,满足了室内定位高精度、低功耗和低复杂度的需求,在室内定位领域有着无可取代的地位[4],可用于各个领域的室内精确定位和导航,尤其是“工业互联网+安全生产”场景。
1定位测距方法
1.1到达时间法
到达时间(Time of Arrival, TOA)是基于时间的距离估算方法中最简单的一种。它使用单向通信进行测距,这意味着系统的基站和标签只作为发射机或接收机当中的一种,可以大大降低设备硬件及系统组网和部署的复杂性。
TOA测距操作仅由一个传输完成,发射机向接收机发送含当前时间戳的数据,接收机收到数据后,对接收时间、发送时间进行比较。由于光速是已知的常数,一次可以确定发射机和接收机之间的距离。然而,TOA采用的是单边通信方式,无论是基站和定位标签,都无法在双方系统时钟不一致的情况下计算出信号的绝对一致的传播时间,所以TOA系统在实践中很难实现[5]。
1.2到达时间差法
从原理上讲,到达时间差(Time Difference of Arrival,TDOA)和TOA非常相似,但TDOA方法并没有计算每条消息从标签到基站的绝对传播时间,而是使用其到几个基站的TDOA来进行距离估算[6]。TDOA测量的是信号到达不同接收机的相对时间,因此要求接收机的时钟严格同步,而发射机不需要这种同步。因为基站的位置通常是固定的,可以通过有线网络进行连接,这就消除了TDOA对更复杂的无线时钟同步算法的需要,在一定程度上简化了系统。但是如果负责时钟同步的基站发生故障,整个定位系统的可用性就会大大降低。
1.3飞行时间法
飞行时间(Time of Flight,TOF)是一种双向测距技术,通过测量UWB信号在基站与标签之间往返的飞行时间来计算距离,从而完全消除了系统中各节点之间时间同步的要求。TOF原理如图1所示。

2系统设计
2.1系统架构
基于UWB技术的定位系统,重点针对人、车和资产等,在现场部署定位基站和定位标签等物理终端,在控制中心部署位置解算引擎和应用软件,对被定位目标的实时位置、实时轨迹进行监控。通过将位置数据和现场的地图进行关联,可以实现对“人的不安全行为”(超时滞留、超员和进入危险区域等)的实时感知,从而降低安全风险。系统架构如图2所示。

定位系统由基础设施层、平台层和服务层组成,形成了IAAS、PASS和SAAS的标准云架构体系。
2.2系统功能
基础设施层:由定位基站、定位标签组成。定位基站和定位标签之间采用双向测距法(Two-Way Ranging,TWR)(TOF之一),TWR不需要时间同步,大大降低了系统部署难度和成本。但是由于采用双向测距,交互的消息较多,定位标签的续航能力受到一定限制,并且消息可能在空中发生碰撞,所以消息发送的时序必须严格控制,导致单基站标签容量较小。基站和标签进行消息交互,基站将相关信息(定位信息、标签电量和SOS标志等)通过有线或无线网络上报到PASS层的定位解算引擎。
平台层:由定位引擎、数据管理、消息服务和寻址服务等平台功能模块组成。解算引擎收到基站数据后,采用卡尔曼滤波算法等技术,对数据进行处理,根据系统配置的地图信息,解算出被定位对象的二维或三维坐标。同时根据相关定位辅助手段或原则,对异常点位进行平滑处理,对无点位进行插值。数据管理模块实时更新标签、地图等信息,实现内存数据和配置数据的同步。消息服务模块实现PASS层和SAAS层、PASS层和IAAS层之间的消息交互。通过MQTT等方式,向SAAS层提供位置、标签等信息,通过UDP方式,向IAAS层提供标签震动、短消息等数据。寻址服务模块提供应用层向定位标签下发指令的基站寻址功能。
服务层:由应用软件(权限管理、配置管理、定位管理和设备管理等)、位置服务接口管理等模块组成。权限管理提供了账号和密码及权限管理,不同的用户具备不同的权限。配置管理提供了组织架构、地图、告警规则、基站和标签等数据和设备的配置功能。定位管理是核心业务模块,提供了位置监控、实时轨迹、历史轨迹和电子围栏等功能。设备管理提供了设备运行状态监控功能,当设备(主要是基站)发生故障时,设备拓扑图中相关设备的颜色会发生变化,提示设备故障。位置服务接口管理模块通过MQTT、WebService等方式,和其他信息化或应用软件进行通信。
2.3关键技术
2.3.1双向测距时隙分配
定位区域内存在多个定位标签时,如果不划分时隙,多个标签可能同时发送数据,这样这些数据会产生信号碰撞,导致有效数据包丢失或数据包内容紊乱。为了解决这个问题,本系统采用了双向测距时隙分配算法,提高了信道的利用率,信号传输效率比较高,系统定位精度较为稳定。其设计方案如下:
①时钟同步。在定位区域内设一主站,主站下发response消息标识CMD1,从站下发response消息标识CMD2。主站下发的response消息中含有基站的系统时钟数据(单位ms)。标签收到主站标识后根据主站时钟数据同步标签本地系统时钟。
②帧时隙划分。标签以2 Hz的频率发送定位消息,则将1 s内分为两个超帧500 ms。每个超帧设置20个slot(槽点,每个slot时隙长度25 ms)。在每个slot内将会有最多2个标签和各基站(最多6个)之间完成测距。每个标签在自己对应的slot点起点发送poll消息。
③定位消息包时隙划分。基站在收到标签发送的poll消息后开启延时发送response消息,延时时间为0=4 ms+(Anchor_id % 6)*2 ms(即0最短4 ms,最长14 ms)。
2.3.2业务指令下行寻址
当应用层判断某种紧急情况(比如被定位对象进入危险区域、进入某区域停留时间过长等)发生时,应立即通过某种方式(比如让定位标签产生振动)下发指令提醒被定位对象,所以指令如何准确、可靠地下发至定位标签成为关键因素。
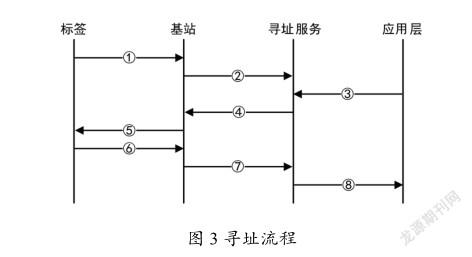
因为定位标签可能处于移动状态,并且标签只和定位基站有通信通道,和应用层之间无直接通信通道,所以应用层下发给定位标签的指令必须通过定位基站进行转发,因此定位基站必须实时更新“漫游”至本基站的标签,并上报至平台层的寻址服务,寻址服务实时更新基站和标签的所属关系。具体流程如图3所示。
①标签和基站(基站可能是多个)完成测距;
②基站将测距数据上报到定位解算引擎,解算引擎将基站和标签的关联关系记录到内存数据库(可能存在多个基站关联一个标签的情况);
③应用层监测到某种突发情况,向指定标签下发某种指令;
④寻址服务接收到指令后,根据标签ID从内存数据库中查找所属的基站(可能会找到多个),并根据此基站ID从内存数据库中查找基站通信地址,然后将指令发送到此基站,同时启动定时器;
⑤基站收到指令后,通过私有消息发送到标签;
⑥标签收到指令后,进行处理,并将处理结果上报到基站;
⑦基站将指令处理结果上报到寻址服务;
⑧寻址服务将处理结果上报到应用层。
如果基站和标签之间的通信或处理过程出现错误,则寻址服务的定时器会产生时超,此时,寻址服务可以继续通过同一基站下发指令,或选择另一台基站下发指令,保证指令能成功发送到标签。
3系统实现
3.1基础设施层
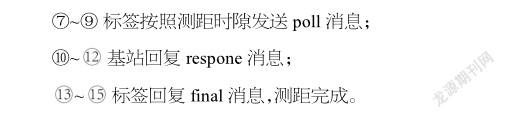
基础设施层主要包括基站和标签、基站和标签通过无线通信实现消息交互。如果要实现较为精准的定位效果,至少需要3个基站,流程如图4所示。
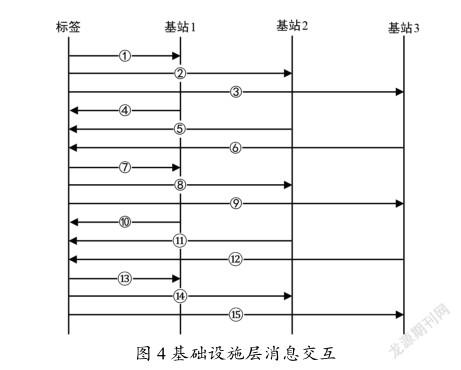
①~③标签周期性通过广播发送blink消息,消息中包含标签ID等相关信息;
④~⑥基站收到blink消息后,解析出标签ID并加入列表,同时向标签回复range_init消息,range_init消息用于告知标签分配好的测距时隙;
3.2平台层
平台层主要由管理服务、代理服务和位置解算引擎等模块组成,核心功能模块是定位解算引擎,具体实现如图5所示。

管理服务功能如下:
①启动配置相关进程和线程。启动代理服务、位置解算引擎及相关线程。
②线程管理功能。查看、停止、启动相关线程。
③守护功能。探测代理服务、位置解算引擎的运行状态。
④日志查看功能。可以查看代理服務、位置解算引擎的日志。
代理服务负责位置解算引擎中相关线程之间的通信,在数据库中配置各线程的通信端口,根据配对通信配置,将数据发送到相关地址。代理服务的功能类似于邮箱管理,在数据发送的同时,提供缓存和重发机制,保证数据发送的可靠性。
位置解算引擎由基站通信线程、位置解算线程、位置增强线程和消息推送线程组成。
3.2.1基站通信线程
基站通信主要是建立和基站通信的服务,并对数据进行相关处理,具体如下:
①建立UDP服务,侦听基站的UDP报文;
②收到基站的UDP报文后,解包(提取基站ID、标签ID、标签流水号、标签测距/时间戳、电量信息和SOS按键标志等);
③根据基站ID,从内存得到地图等信息,与解包后的数据一起通过代理服务发送到位置解算引擎。
3.2.2位置解算线程
位置解算线程主要是对位置信息进行解算,具体如下:
①负载均衡功能。根据标签数量、均衡原则,创建多个解算线程。
②解算功能。根据代理服务提供的数据,判断是TWR还是TDOA,采用不同的算法进行解算。
③数据发送功能。将解算后的数据通过代理服务发送到位置增强线程。
3.2.3位置增强线程
位置增强线程主要是判断解算后的位置数据是否合理、是否需要补点等,具体如下:
①负载均衡功能。根据标签数量、均衡原则,创建多个增强线程。
②限幅滤波功能。判断位置是否是坏点,如果是坏点,则必须丢弃。
③活动区域判断功能。判断位置是否在活动区域内,如果不在活动区域内,则必须丢弃。
④补点功能。无论是坏点,还是在活动区域外,丢弃的点必须根据一定的原则进行补点,否则运动轨迹会产生跳跃。
⑤平滑功能。按照平滑原则进行位置平滑,比如3点平滑、7点平滑等,平滑的点数越多,轨迹展示的延时越长,但效果也越好。
⑥数据发送功能。将平滑后的数据通过代理服务发送到消息推送线程。
3.2.4消息推送线程
消息推送线程主要提供将位置增强后的数据推送给其他信息化或应用软件,具体如下:
①负载均衡功能。根据标签数量、均衡原则,创建多个推送线程。
②数据发送功能。根据地图ID,发送到MQTT中以地图标识命名的主题。
3.3应用层
应用层主要实现用户权限管理、应用业务和设备管理等功能,架构如图6所示。
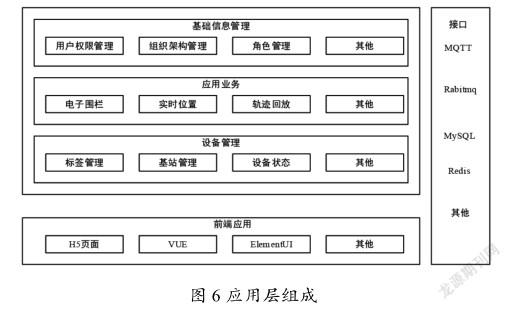
系統采用前后端分离的技术架构,通过nginx+springcloud的方式进行解耦。采用浏览器/服务器+数据库(BWD)3层技术,按照JAVA规范进行设计、开发,适用于Windows操作系统,具备易部署、易维护和易升级等特性。
4结束语
基于UWB技术研发的iSafe定位系统,具备高精度、抗多径等特点,尤其适用于冶金、石油化工等工业生产现场。
iSafe定位系统已在某电解铝车间应用,实现了人员位置数据、体征信息的数字化,通过定位标签和人员的关联,精准记录了人员的位置信息。根据位置信息,对进入危险区域人员发出告警,避免人员因接触危险区域而引发安全事故。同时,对于非生产人员进入生产区域、访客进入非指定区域等均引发告警,有效提升了厂区的安全管理水平。
定位系统通过将人员、车辆和设备等的位置信息数字化,形成了“位置物联网”。基于位置物联网的定位系统,不仅在“工业互联网+安全生产”中发挥重要的作用,在离散或流程工业的生产工艺中也可以将位置信息和生产流程关联起来,实现车间无纸化办公,通过分析每个生产环节的相关信息,能够对生产计划、产品订单进行合理调配,产品生产可控、质量可追溯,优化生产流程,提高生产效率。
参考文献
[1]闫大禹,宋伟,王旭丹,等.国内室内定位技术发展现状综述[J].导航定位学报,2019,7(4):5-12.
[2]范烨,陈秋霞,倪丽慧.DWM1000模块的UWB机器人室内定位系统[J].单片机与嵌入式系统应用,2018,18(11):48-50.
[3]李晨辉,甄杰,祝会忠,等.复杂环境下的超宽带高精度定位算法[J].测绘科学,2020,45(1):4-10.
[4]赵明剑.低功耗高速可植入式UWB发射机与接收机芯片的研究[D].广州:华南理工大学,2013.
[5]刘国栋.基于UWB的室内定位技术研究[D].南京:南京邮电大学,2014.
[6]郭建广.超宽带无线定位技术研究[D].宁波:宁波大学,2015.
