康达附壁气动推力矢量控制技术的发展
2023-04-24王士奇,罗斌,张翠珍等
气动推力矢量控制技术能为飞行器提供多个方向的操纵力和力矩,显著提升飞行器的机动性、敏捷性,满足短距起降的需求。在众多气动推力矢量控制技术路线中,康达(Coanda)附壁气动推力矢量控制技术已经过多次飞行演示验证,展现了较广阔的应用发展前景。
相较于机械推力矢量控制技术,气动推力矢量控制技术是在喷管主结构形式保持不变的前提下,通过注入二次流实现气流方向的控制,为飞行器提供操纵力矩,具有构型更简单、质量更轻且响应更迅速的特点。气动矢量技术从空气动力学原理上可以分为激波控制和康达附壁控制,如图 1所示。其中,激波控制包括激波矢量、喉道偏置和双喉道矢量控制等方法,基本原理是在喷管不同位置注入二次流,诱导产生斜激波以改变主流方向,进而实现推力矢量化;康达附壁控制的基本原理均是以康达壁面为主要构型,借助主流的康达效应(Coanda Effect),同时利用二次流与发动机主喷流剪切层的相互作用实现主流的矢量偏转控制。康达附壁类控制根据二次流和主流的相对方向不同,进一步细分为逆向流、同向流和法向流等方法。在亚声速喷管中,康达附壁控制方法能够获得相对较大的矢量角,且具备较高的控制效率和较佳的控制线性度。
康达附壁类控制技术发展现状
由于逆向二次流激励手段需要在喷管外部构造一个负压环境,以实现对气流的抽吸,工程实现难度较大,因此康达附壁气动矢量技术的发展主要围绕同向二次流和法向二次流激励手段开展,如图2所示。
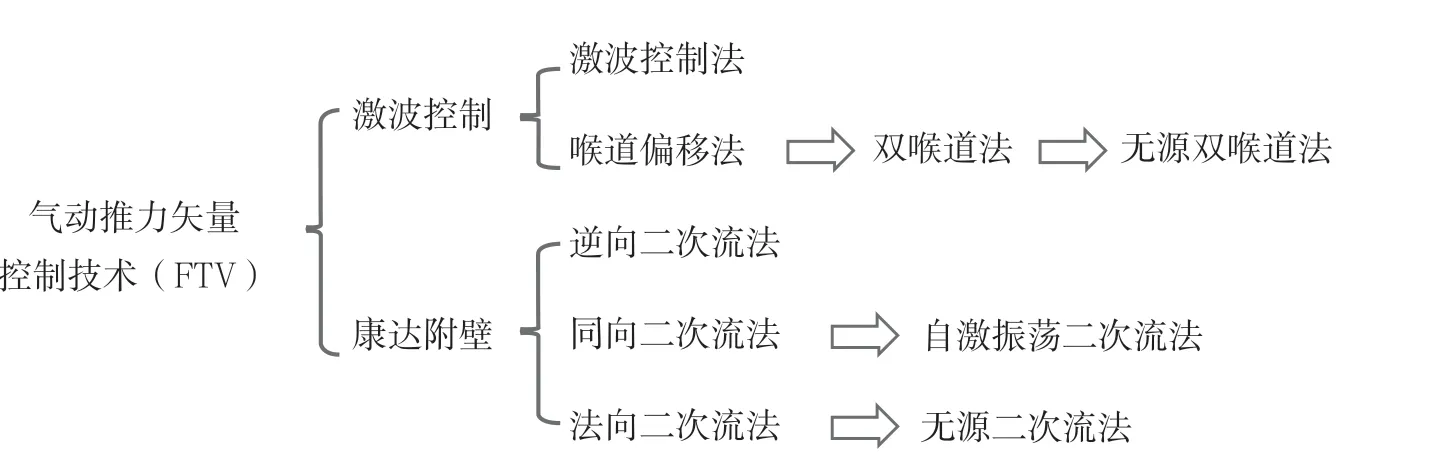
图 1 现有气动推力矢量控制技术路线
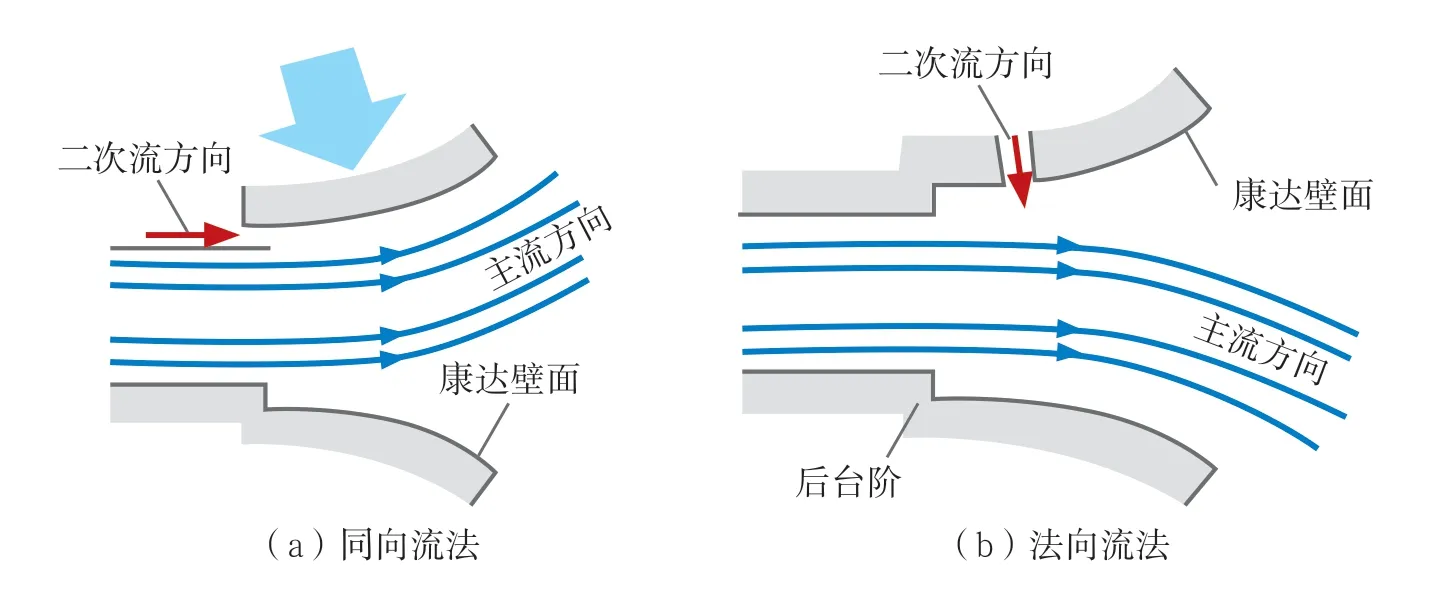
图 2 工程中常见的康达附壁气动矢量控制技术的两种引气激励方案
同向流康达附壁推力矢量控制
从20世纪90年代,英国曼彻斯特大学相关研究团队就开始进行同向流康达附壁推力矢量控制的相关基础研究。在微型涡喷发动机测试平台上进行的一系列试验证明了同向流技术在低速、亚声速喷管中高效控制能力,所获得的矢量角可以超过25°。为了推进同向流技术在飞行平台中的应用,该团队完成了推力矢量控制系统的地面静态测试,获取了推力矢量的控制响应曲线,如图3(a)所示。结果表明,根据流量范围确定合适的控制阀尺寸,控制响应就能保持良好的线性度,且控制响应特性具有独特的“N”形特征,中间存在一个负增益的反向控制区,两侧则呈现出正向控制特征,其中反向控制增益是正向控制的10倍,即控制所需的引气量是正向控制所需的1/10。
在大量基础研究成果的支撑下,“恶魔”(Demon)无人验证机在2010年9月完成首飞,其借助同向流康达附壁气动矢量控制和环量控制技术实现了对传统机械舵面的完全替代,如图3(b)所示。其中,气动矢量喷管主要用于取代传统的升降舵实现飞机的俯仰控制,初步证明了气动推力矢量控制技术实现飞行器操控的可行性和广阔的工程应用前景。“恶魔”无人机的喷管从方形入口过渡到矩形出口,矩形截面长宽比为10,如图3(c)所示。
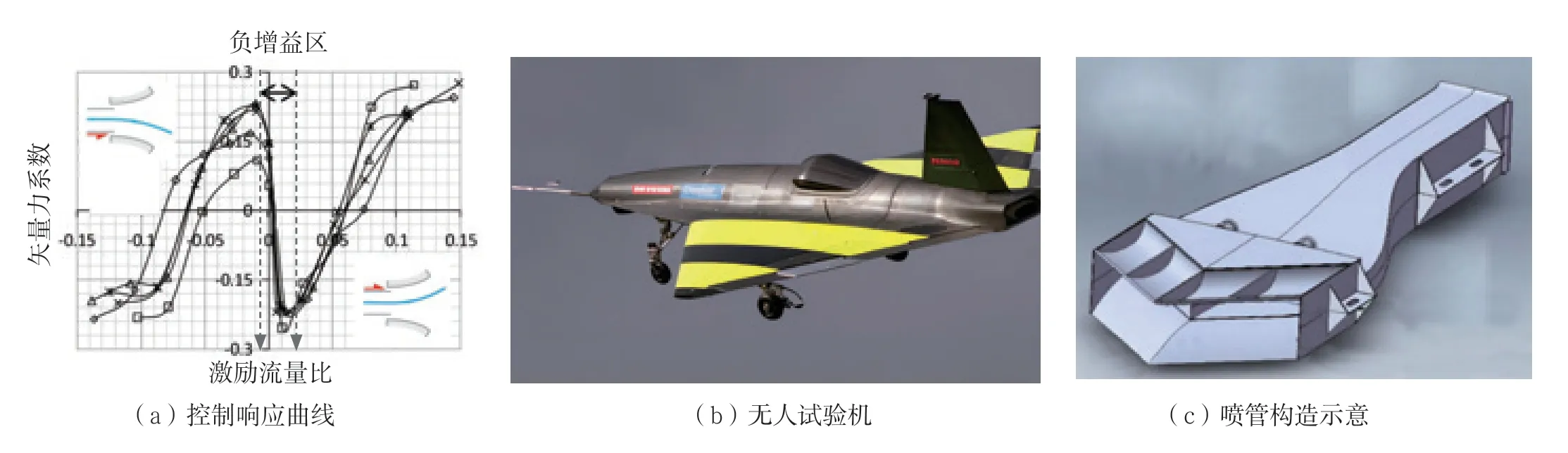
图3 “恶魔” 无人机相关研究
法向流矢量控制
在上述同向流推力矢量技术研究的基础上,为了充分发挥康达附壁效应中负增益控制区内高效气动矢量控制潜力,英国BAE系统公司和曼彻斯特大学研究团队又发展了基于法向二次流的康达附壁气动矢量控制技术,在设计中引入了后台阶结构,通过台阶下游的法向二次流控制气流实现矢量偏转,并利用台阶结构消除气动矢量控制的迟滞和双稳态现象。采用如图4(a)所示的微型涡喷发动机喷管,其峰值马赫数(Ma)约为0.8,该技术方案只需要大约2%的发动机核心流量即可实现10°的矢量力偏转角。同时,在控制规律方面,试验测得该技术方案的控制响应曲线如图4(b)所示,结果表明控制响应中心的“死区”被消除,以推力矢量控制实现了类似于常规舵面控制的效果。该技术方案最终在“岩浆”(Magma)无人机中进行了飞行验证,如图4(c)所示。相比于“恶魔”无人机采用的同向流激励方案,该技术路线的控制响应线性度更好,控制响应特性更优。“岩浆”无人机试飞验证的成功代表了气动推力矢量应用研究的最高水平,同时也充分证明了气动推力矢量控制技术在高隐身无舵面飞行平台中的工程应用前景。

图4 “岩浆” 无人机相关研究
康达附壁矢量控制技术改进设计
以上所述的同向流和法向流矢量控制技术都存在一定的控制效率不足的问题,即所需要的二次流流量过大以及矢量偏转角不够的问题。针对该问题,国内学者分别针对这两种技术提出了改进设计的方法,一种采用无源次流的方式来避免了气源引气,另一种则引入自激发振荡射流来代替传统定常射流以提升矢量控制效率。
无源二次流矢量控制
南京航空航天大学顾蕴松团队提出了基于康达效应的无源气动矢量控制技术以解决有源气动矢量控制对二次流的依赖,其技术原理如图5(a)所示,在主射流引射作用下产生低压区,通过喷管两侧联通大气引入外界气流,从而驱动射流方向偏转,无须额外的二次流气源,而是通过控制阀的开度来进行矢量偏角的控制,该技术与法向流矢量控制技术的区别主要是其所用的二次流直接来源于外界大气。该技术方案最大的问题在于,要保证外界大气压力始终高于喷管内的压力,这在实际的应用场景中往往难以实现。

图5 无源二次流康达附壁气动矢量控制
顾蕴松团队针对上述无源康达附壁气动矢量控制技术开展了系列研究,采用长宽比为10的矩形截面喷管,在微型涡喷发动机测试台上进行了试验测试,并进行了模型飞行演示。通过测力试验得到的平均推力矢量角随控制阀变化的控制曲线,如图5(b)所示,其最大推力矢量角约为12.8°,并实现了主射流的连续可控偏转,且具有接近线性的推力矢量角控制规律。
振荡射流激励矢量控制
以低二次流消耗实现高效矢量控制和优良、可重复的控制特性是气动矢量控制领域不断追求的两个关键目标。振荡射流激励器(也被称为流体振荡器)不含任何活动部件即可产生宽幅扫掠张角和高达10kHz的高频激励,其产生的高频振荡射流可以实现远比定常直射流更为显著的流动控制效果。在此基础上,中国航发研究院与上海交通大学、中国民航大学组成的联合研究团队提出以流体振荡器代替传统的圆孔或狭缝,发展出了基于振荡射流激励的新型康达附壁气动矢量控制技术,其原理及几何构型如图6所示。流体振荡器产生的同向振荡二次流,具有强烈的非稳态特性,可以显著增强主流在喷管出口的康达效应,使主流更容易向喷管康达壁面偏转,能够在提高矢量控制效率的同时,改善矢量控制的线性度。
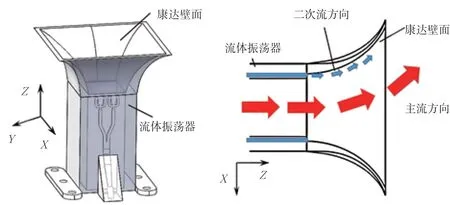
图6 基于振荡射流激励的新型康达附壁气动矢量控制
涡喷发动机—气动推力矢量整机试验结果表明(如图7所示),基于振荡射流的同向二次流矢量控制方法可以用较少的二次流消耗实现大幅度的矢量偏转角,证明了上述方法在真实应用环境下的可行性,为进一步的飞行平台验证奠定了坚实基础。

图7 同向振荡二次流气动矢量微型涡喷发动机测试平台及初步试验结果
几种康达附壁技术方案对比
本文初步介绍并总结了同向流矢量控制、法向流矢量控制、无源气动矢量控制和基于振荡射流的同向流矢量控制四种典型的康达附壁气动矢量控制技术,这些技术的总结见表1。
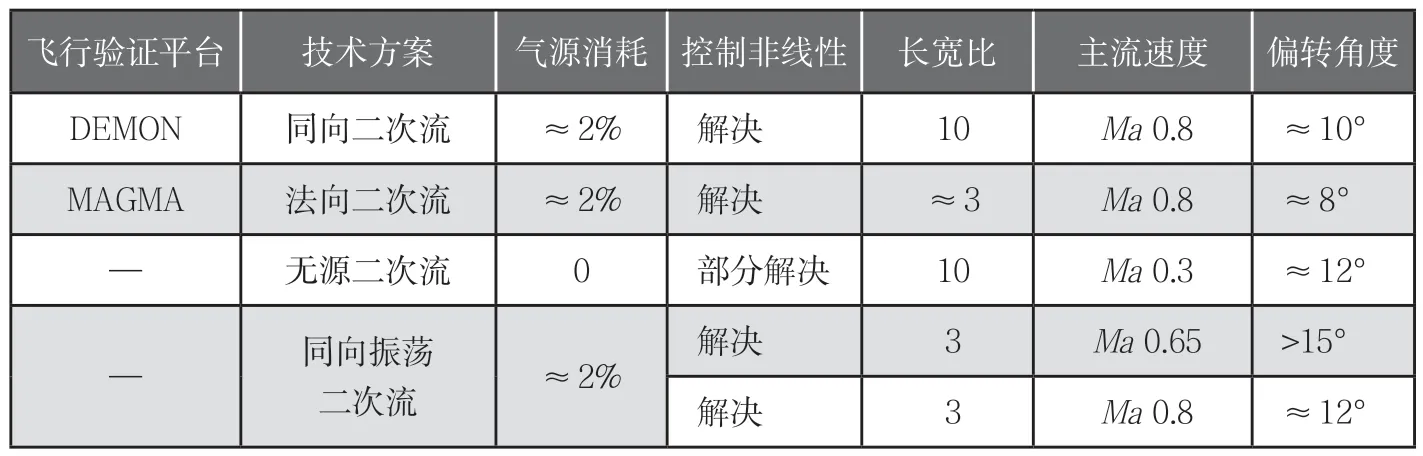
表1 4种康达附壁气动矢量控制技术的总结
在控制效率方面,“恶魔”无人机采用的是同向流矢量控制方法,在负增益区内,用较小的气源消耗实现了大长宽比、Ma0.8高速主流的矢量控制,偏转角度达到10°,但在正增益区内,矢量控制效率有所降低。“岩浆”无人机采用的法向流控制方法,所选用的喷管长宽比更小,获得的偏转角度也更小,控制增益相比“恶魔”无人机有所降低。无源气动矢量控制无需额外二次流气源消耗,控制效益较大,偏转角可以达到12°,但是其适用的主流速度偏低,且在高空大气环境压力低于喷管内压力时无法使用。振荡射流激励矢量控制技术具有足够大的控制效益,在Ma0.5的冷态主流条件下以约2%的二次流可以实现高达18°的矢量偏转角,在微型涡喷发动机主喷流Ma0.8条件下,推力矢量偏转角可达12°,而二次流消耗仅有2.2%,激励压比仅为2.8。相比其他几种技术,振荡射流激励矢量控制技术在控制效率上具有较大的优势。
在控制规律方面,“恶魔”无人机的同向流控制主流附体和流动迟滞效应带来的控制非线性问题比较严重;而“岩浆”无人机的法向流控制响应曲线线性度更高,控制响应特性更好。无源气动矢量控制技术也通过了外形优化部分解决了控制非线性问题。振荡射流激励的气动矢量技术,具有良好的控制特性,控制死区小,成功解决了控制响应曲线的突跳和非线性问题。相比于其他方案,基于振荡射流的同向流矢量控制降低了气源消耗,增大了矢量偏转角,同时提高了控制的线性度,展现出了较为明显的综合优势。
结束语
与目前成熟的机械推力矢量控制技术相比,要想发挥气动推力矢量控制技术结构简单的潜在优势,避免其喉道面积难以大幅调节的劣势,必须选择合适的应用场景,采用能够满足多维度评价指标的技术方案,才能较快地推动包括康达附壁气动矢量方案在内的气动矢量控制技术的工程应用。目前来看,面向无舵面布局超隐身无人机的应用平台,采用固定型面亚声速喷管的中小推力涡喷/涡扇发动机,用于增强飞行平台舵效实时控制能力的气动矢量控制技术是相对可行的工程应用发展路线之一,康达附壁气动矢量控制技术有望在此发展方向率先实现应用突破。