基于蓝牙和LoRa 的广区域无线电目标监测系统
2023-04-19张卫华周激流
刘 涵, 张卫华, 周激流
(1 四川大学 电子信息学院, 成都 610065; 2 四川大学 计算机学院, 成都 610065)
0 引 言
高原鼠兔(Ochotona curzoniae)是一种小型非冬眠的植食性哺乳动物,隶属于兔形目、鼠兔科、鼠兔属,在国内分布于西藏、青海、甘肃南部、四川西北部,栖息海拔约为3 000 ~5 100 m[1]。 高原鼠兔身材浑圆,没有尾巴,体色灰褐,数量大,多栖息在土壤较为疏松的坡地和河谷,营洞穴生活。 高原鼠兔在适宜范围内对高寒草甸植被群落结构的种类、组成、多样性、生物量及种子传播具有一定的积极效应,但当种群密度过大则会对高寒草甸生态系统的植被和土壤产生较大的负面作用,加速植被和土壤退化,迫使鼠类活动的有利作用向有害方向转变。 高原鼠兔活动利害转变的关键在于确定种群致灾密度从而发挥其积极作用,维持高寒草甸生态系统的平衡[2]。 因此,在其种群密度过大时实施鼠害控制技术就尤为重要。
与常规的动物监测不同,高原属于偏远地区,地理和天气环境恶劣,且没有通信网络覆盖,无法提供电源供电,导致对此类地区的大范围目标监测项目难以展开或有效实施。 已有研究的应用范围大部分为小型区域或室内场景,且其位置匹配方式大多基于预采集位置指纹库数据,难以在广区域目标监测领域进行推广。 近年来,物联网技术发展迅猛,蓝牙是一种优秀的超低功耗技术,在广区域通信技术中,LoRa 是得到普遍认可和应用的超远距离传输技术[3]。 本文将以一个综合性的视角对这2 项技术进行讨论,且针对上述问题,结合二者技术特点,基于蓝牙和LoRa 提出一种突破了续航和通信距离方面瓶颈的广区域无线电目标监测系统,将其引入长时间可持续的动物监测领域,用于监测和评估鼠害控制新技术的作用和生态修复效果,这两者结合将把蓝牙和LoRa 带入一个全新的应用领域。
1 超低功耗蓝牙
在提出蓝牙4.0 标准的6 年后,蓝牙技术联盟(Bluetooth Special Interest Group (SIG))在2016 年正式发布了蓝牙5.0 的主要特征[4],这是短距离无线通信技术的一项重大发展,即如SIG 所说,新标准将会显著改变人与设备交互的方式[5]。 蓝牙5.0 针对低功耗设备速度有相应提升和优化,与蓝牙4.2相比,可实现2 倍传输速率、4 倍通讯距离以及8 倍广播数据量[6],此外在抗干扰方面还具有更健壮的鲁棒性。
从蓝牙4.0 开始,为了拓展蓝牙在低功耗应用领域的影响力,低功耗蓝牙技术(BLE)作为蓝牙的一个基础组成部分被引入蓝牙通信标准[6],并在其后的4.1 和4.2 版本中被持续改进[7]。 传统蓝牙面对的最大挑战是电量的高损耗,低功耗蓝牙的出现大幅降低了蓝牙设备的功耗,该技术可使用极低电池量的装置进行供电,并实现3 ~24 个月的续航能力。 在低功耗设备中,BLE 可将功耗和设备成本降至最低的能力,使得蓝牙在早已被大量应用的各类标准无线传输技术中更具竞争力[8]。 此外,蓝牙5.0在物理层新增加了一种2 Msym/S 的调制方案,称为LE 2M PHY,这使得BLE 可以使用2 MHz 带宽传输数据,这也对应2 倍传输速率。 随着传输速度的提高,蓝牙变得更加节能,因为传输相同大小的文件理论上所需的时间可以减半。
BLE 的一个经典应用场景是蓝牙设备仅仅以广播方式工作,如Beacon、即蓝牙信标,携带其他蓝牙设备的用户在与其靠近时可以从该设备获得广播信息,一般所说的Beacon 设备是指低功耗蓝牙从设备。 Beacon 技术来源于苹果公司发布的一款iBeacon 设备,在2013 年世界苹果开发者大会(WWDC)上第一次被推出[9]。 作为Wi-Fi 的最新替代品,Beacon 设备被广泛地应用于物联网IOT 程序中,设备特点是降低了功耗、并增大了覆盖范围,通常用纽扣电池进行供电,一般能工作3 ~24 个月不等的时间。 在蓝牙5.0 以前,接收者必须和Beacon 设备建立连接,使得这种方式十分低效,蓝牙5.0 重新设计了一整套广播系统,同时还引入了无连接广播方式,使得非同步蓝牙设备可以交换数据,并且消除了配对连接的需要,从而大大提高了蓝牙接收设备的效率。
2 Long Range Radio (LoRa)
LoRa 是新一代低功耗广域网(LPWAN)通信技术[3],由Semtech 公司于2013 年发布提出并获得专利,拥有高于常用的无线通信技术的接收灵敏度,强调在高干扰和噪声环境下的高接收灵敏度及低功耗长距离通信,其为半双工系统,上下行工作在同一频段,采用线性调频扩频调制技术,单次传输载荷长度最大支持256 字节。 LoRaWAN 是由LoRa 联盟制定的低功耗广域网协议和系统架构,LoRa 定义了系统的物理层,而LoRaWAN 是建立在LoRa 物理层之上的媒体控制访问(MAC)层协议。 LoRa 中有5 个重要的参数,分别是:发射功率、载频、扩频因子、带宽和码率[10]。 LoRa 使用免费的非授权频段,在不同的地区有不同的参数标准,如EU433、CN470、EU868和US915 等,在中国采用的是CN470,代表可使用的频段范围是470 MHz 至510 MHz。 LoRa 提供了125 kHZ、250 kHZ 和500 kHZ 这3 种可伸缩的的带宽设置,更高的带宽能够增强LoRa 抵抗信道噪声的能力和抗多普勒效应的能力,但是相应会降低其频谱利用率[10]。 LoRa 具有8 个相同带宽的信道,每个信道支持6 种扩频因子SF7~12,扩频因子每加1 将增加2.5 dB 的接收机灵敏度,即可以增加信号覆盖范围,但相应会降低数据速率,这提供了不同数据速率和覆盖范围在选择上的灵活性。 终端采用随机信道选择方式进行干扰规避。 扩频因子的选择需要权衡通信距离或信号强度、消息发送时间等因素,当链路环境好的时候,可以使用较低的扩频因子,而当通信距离远、链路环境较差时,可以增大扩频因子以获取更高的灵敏度[11]。 LoRa 采用循环纠错编码进行前向错误检测与纠错,使用该方式会产生传输开销,码率则是指数据流中的非冗余部分比例,典型有4/5、4/6、4/7 和4/8 四种设置,越高的冗余部分会导致越低的传输效率。 LoRa 设计终端可工作在3 种不同的模式下,即ClassA、B和C,但一个时间内只能工作于一个模式,每种模式可由软件进行加载。不同的模式适用于不同的业务模型和省电模式,目前广泛使用的为ClassA类工作模式,以适应IoT 应用的省电需求[11]。
3 目标监测方法
无线信号在传输过程中,随着传输距离的增加,信号会呈对数形式逐渐衰减。 根据此特性,当前的蓝牙定位方案基于相同的实现方式:通过信号衰减后的信号强度值,估算蓝牙收信设备与发信方的距离。 RSSI(Received Signal Strength Indicator)是射频信号理论术语,主要应用于发射机和接收机之间的距离测量。 该方法是依据接收信号能量强度确定距离,对通信信道参数要求较高。 其测距理论是基于无线电波在介质中传输时,信号功率随传播距离衰减这一原理。 根据信标节点已知信号的发射功率和节点接收的信号功率,通过信号与距离之间的衰减模型计算出节点间的距离,在环境并不复杂的条件下,可以利用接收到的RSSI值进行小范围的简单定位[12]。
无线信号的接收功率和距离之间的关系可以用式(1)表示:
其中,pR是无线信号的接收功率;A可以看作信号传输1 m 远时接收信号的功率;d是收发单元之间的距离;n是传播因子,数值大小取决于无线信号传播的环境。
由式(1)可以得到,常数A和n的数值决定了接收信号强度和信号传输距离的关系。 这里的关键影响因素是常数A和n的大小。 其中,传播因子n的数值反映了无线信号在传播过程中受到的衰减、反射、多径等干扰,n取值越小表明信号在传播过程所受到的干扰越小, 信号传播距离越远,无线信号的传播曲线与理想情况越接近,基于RSSI 的测距定位就会越精确。
对于高原鼠兔监测场景这类广区域的超小型动物的监测场景,不适宜在实验对象上使用尺寸较大的高增益外置天线,且低功耗要求限制了发射功率,而这将进一步限制了广播信号的信号强度,故应采用蓝牙感知技术,根据发信方的信号强度变化来判断发信方的位置。 收信方接收到发信方的信号,通过信号衰减模型对信号进行分析,转换为发信方到收信方的相应估计距离,在移动中,随着距离发生变化,信号强度会随之发生变化,信号增强,则更接近发信方,反之,则远离发信方。 当存在多个连续位置估计数据的情况下,使用信号滤波技术(如高斯滤波和卡尔曼滤波)来检测和延缓信号数据中的虚假或突然变化趋势。 此外,当有3 个以上的基站同时接收到信标广播数据时,可以通过监测信号质量指标(如RSSI) 选择最佳的基站子集来提供更准确的位置估计,根据环绕在发信方附近的最佳信号基站子集所接收的数据的绝对强度和相对变化进一步分析其方位和移动趋势。
4 实验样例
4.1 系统总体设计
本方案计划在高原鼠兔身上佩戴蓝牙Beacon信标,使其以一定的时间间隔不断向外广播定位信息,并在试验场地以一定距离间隔分布架设多台接收基站。 基站可以识别出不同个体发出的广播信息以及解析其RSSI 强度,并基于多个基站汇总的采集信息对高原鼠兔位置进行估计和跟踪。 基站在扫描到Beacon 广播数据后提取信息并保存在基站本地,等待LoRa 中央主机的轮询请求,通过LoRaWan 无线通信将定位数据传输汇集至中央主机。 该系统由2 个子系统组成,分别为:蓝牙系统和LoRa 系统。
蓝牙系统负责通过广播和扫描来收集实验对象在空间内的分布位置,主要分成2 个部分。 一个是佩戴在实验对象上面的蓝牙Beacon 信标,另一个是固定基站中的蓝牙基站模块。 蓝牙系统的工作机制如下:Beacon 设备会被设置成广播模式,每隔固定时间广播其唯一标识号和定位信息,并不与任何蓝牙基站进行连接。 根据对实时性的要求,可以设置被追踪者信号的广播周期,广播周期越大,电池的能耗越小,被追踪者待机时间也越长,该周期的长短决定了追踪位置的刷新率。 独立的蓝牙基站在扫描基站范围内所有的2.4 GHz 信号时,通过过滤策略筛选出其区域范围内接收到的Beacon 广播数据包并对数据进行处理,该数据包含有31 字节的内容,其中会指示该数据包来源的Beacon 设备的MAC 地址和当前接收的RSSI 数值信息,而RSSI 即为距离感知定位的关键信息。
LoRa 系统是一套基于LoRaWan 基础上的点对点半双工通信系统,负责接收由蓝牙基站模块串口转发而来的位置数据,并按照指定格式对其进行分割保存和传输,且为隔绝信息传输污染,设计了专属配对频率和通信频率进行切换。 为保证整个无线传输系统的可靠性,制定了一个应用层的通信协议,对整个无线通信过程提供进一步的保障。 而且,本文在通信协议层还对发送超时和接收超时等事件的处理做出了一些规定,保证在该传输协议下系统的鲁棒性以及避免发生传输失败事件时可能产生的数据丢失。 由于区域内有基站数量多、传输数据流量大的特点,为避免信道拥挤和数据碰撞,采用轮询策略进行配对和通信传输。 该系统主要分成2 个部分,分别是LoRa 基站模块和LoRa 中央主机模块。 其中,LoRa 基站模块和蓝牙基站模块相连,持续收取蓝牙基站模块转发而来的信息,按照一定格式将其进行存储,并在此同时持续打开一个LoRa 接收窗口,持续监测是否收到LoRa 中央主机模块发来的轮询请求。 LoRa 中央主机通过对整个区域的LoRa基站依次进行收取数据轮询,再通过与上位机通信以集中保存数据。 当LoRa 中央主机开始轮询时,将向整个区域按序广播轮询请求,并将该次准备连接的基站设备号加入至广播包中一同广播出去,区域内的所有LoRa 基站都可以接收到该条广播报文,当LoRa 基站收到该广播报文后,将提取其中的信息并和自身的本地基站设备号进行比对,若比对成功,则通过另一专门的通信频率向LoRa 中央主机发送其已经存储的信息。 由于LoRa 协议的限制,单次最多发送256 字节的数据,所以两方需要进行设计和协调,最终分多次将所有的数据传输出去。
4.2 系统硬件组成
蓝牙系统由蓝牙信标模块和蓝牙基站模块构成。 高原鼠兔营洞穴生活,洞道系统错综复杂,以窝巢为中心呈放射状分布,洞系包含隐藏洞穴和栖息洞穴[13]。 洞穴开放洞口数平均为4.7 个,洞道总长度平均为6.37 m,洞道直径平均为7.1cm,洞系距地面的平均距离为30.1 cm[14]。 由于高原鼠兔自身体积极小且经常在地下洞穴狭隘的通道中通行,因此对于在其身上佩戴的蓝牙Beacon 信标的体积和重量有着十分严苛的要求,体积过大会导致其在洞穴中穿梭时被卡住而无法动弹,而重量过大又会干扰其本身的生理习性,影响监测结果的准确性。 在天线的选择和处理上,蓝牙信标模块采用板载PCB 天线,蓝牙基站模块采用ipx 外接高增益天线。 在蓝牙信标模块可选择的小型天线中,板载天线信号增益与FPC 贴片天线相比较弱,但FPC 贴片天线为外置天线,不易做防水处理,且天线片与延长线的连接点处较为脆弱,在对模块进行整体防水封装后,柔性天线将变为刚性,有易断裂风险,故选择采用PCB板载天线。
蓝牙Beacon 信标仅由一个蓝牙模块和一块CR2032 微型纽扣电池组成,并对其总体进行一定防水封装处理。 封装前样式如图1 所示,其总重量仅为5.83 g,可以有效减少监测过程对实验对象的影响。 蓝牙模块芯片采用的是北欧半导体公司的nRF52832 SoC 模块,支持蓝牙5.0 协议,芯片自带高性 能 ARM CORTEX - M4F 内 核, 物 理 尺 寸 为17.5 mm*28.7 mm,具有功耗低、体积小的特点。蓝牙基站模块也采用近似的蓝牙模块实现,唯一区别在于采用ipx 外接10 dBi 高增益天线,以增大广播扫描的范围、及提升扫描准确度。
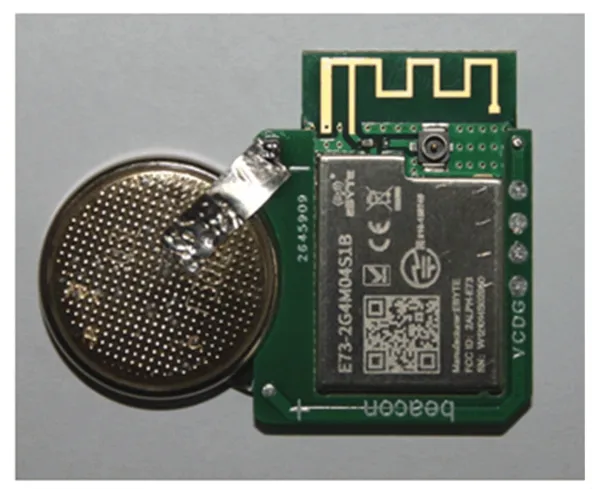
图1 蓝牙BeaconFig. 1 Bluetooth Beacon
LoRa 基站模块采用Heltec 公司的CubeCell 1/2AA Node,该系列模块主芯片基于ASR6502,并集成SX1262 LoRa 芯片,支持LoRaWan 协议,可通过天线延长线连接10 dBi 高增益外置天线。 此外,该模块不采用屏幕显示,这就减少了大量不必要的功耗。 在该方案的部署计划中,相邻基站之间的距离为25 m。
蓝牙基站模块与LoRa 基站模块通过PCB 电路板连接在一起,附上DC 电源插座及3.3 V DC 同步整流电源降压、稳压模块等外围器件后集成为一个基站模块,如图2 所示。

图2 基站模块Fig. 2 Base station module
针对高原恶劣地理环境和可能极端天气环境下的供电需求,基站采用了定制18650 电芯锂电池组供电,电池组容量为40 AH,尺寸为74 cm*75 cm*74 cm,如图3 所示。 整个基站模块使用防水盒进行封装,通过在盒上开孔引出外置天线,在开孔处采用硅橡胶进行防水封闭处理。

图3 锂电池组Fig. 3 Lithium battery pack
4.3 测试及评估
本文对该方案各个模块的性能和功耗均进行了测试。
蓝牙Beacon 模块在待机时处于深度睡眠模式,在3.3 V 下功耗仅1.8 uA,当设置发射功率为4 dBm时广播功耗为70 uA,若采用电池容量为220 mAH的CR2032 微型纽扣电池,根据广播时间间隔的不同,持续使用时间可达5 ~24 个月。 此外,模块和电池的总重量仅为5.83 g,若采用80 mAH 的CR1620电池,可以进一步降低其总重量至3.93 g。
基站模块,当设置发射功率为22 dBm、处于普通工作模式时,基站模块总功耗为26 mA,数据传输模式功耗为36 mA,若采用40 AH 的锂电池组进行供电,可持续工作40~60 天。
Nordic 蓝牙芯片的通信距离经测试在90 m,在40 m 以内信号质量和接收率较好,而同等条件下一些其他品牌的蓝牙芯片经测试其极限通信距离仅能达到40 m。 LoRa 的通信距离理论上在郊区视距下最高达15 km,城市环境中最高可达3 km。 考虑到成本和部署范围的需求,本解决方案仅采用小型模块和天线方案,通信距离实测达1 km。
5 结束语
本文结合蓝牙超低功耗的特点以及LoRa 低功耗超长距离通信的特点,将其运用至高原鼠兔监测这一广区域动物监测场景,针对高原缺电以及其恶劣天气环境等特殊情况,提出了多项具体的定制化解决方案,在保证一定信号强度的条件下实现对高原鼠兔的蓝牙感知追踪和信息传输收集,具有低成本、低功耗、消除运营商依赖等特点。
由于本小型监测对象的特殊性,对蓝牙Beacon信标的体积、重量和运行可持续时长具有极高的要求,一定程度上限制了信号强度和感知精度,若对于更为大型的目标动物监测,可以采用更高的发射功率和更高增益的外置天线,这将大幅提升信号质量、稳定性和覆盖范围,而且还可以减少覆盖整个部署区域所需的基站总数。 此外,随着蓝牙5.1 版本提出的AOA 和AOD 方案的进一步具体落地实现,有望实现更加精确的实时定位[15],但这相应地也会带来更高的功耗负担,且硬件设备的天线必须具有较高的方向性,因此硬件成本和技术门槛会更高,需要根据具体方案指标要求进行评估。 此外,除了单纯使用蓝牙射频信号质量指标外,在大型动物监测条件下还可以增加陀螺仪和加速度传感器等一系列模块进一步辅助提高定位数据的质量。 在监测范围上,LoRa 系统也可采用更高增益的天线和更高的发射功率以实现更远距离的可监测范围。 综上,可以通过多种措施,改善信号质量和覆盖范围以实现更大范围和更高精度的目标监测,推广蓝牙和LoRa在广区域目标监测这一领域的应用。
