基于表面压力信息的空间流向涡识别方法
2023-04-19郭江龙顾蕴松罗帅李琳恺
郭江龙,顾蕴松,罗帅,李琳恺
南京航空航天大学 航空宇航学院,南京 210016
为提高战机在视距内战斗[1]中的生存格斗能力,要求战机具备过失速机动能力。Herbst[2]、Francis 和Keesee[3]指出,过失速机动要求飞机在大迎角飞行状态下能够充分利用其非定常特性。而当飞机处于大迎角飞行状态时,飞行器表面流动的附着与分离、旋涡的生成与破裂以及非对称涡的产生,导致气动力/力矩出现非定常非线性特性,产生颤振、机翼摇滚和航向发散等问题。这种复杂气流可能引起控制舵面失效甚至反效,诱发非指令运动导致战机失控,发生飞行事故。
旋涡给飞行安全增加了很多不利因素:如桨涡干扰噪声[4-6]、发动机地面涡引起的进气旋流畸变[7]、垂尾抖振[8-9]、旋转飞行器振荡鸭舵尾涡和尾翼面的干扰引起飞行器非指令运动[10]。但并非所有旋涡与物面相互作用带来的都是负面影响,旋涡也可以被用来调控流场,从而提升飞行器的气动效率。例如使用流动控制技术改变旋涡强度和旋涡与飞行器表面之间的相对位置,可以抑制气流分离[11-12];边条涡和鸭翼涡与主翼相互作用可有效控制机翼绕流,提高最大升力系数[13]。此外可以使用流动控制技术进行调控,降低旋涡带来的不利影响。例如在飞行器大迎角飞行时,利用前体非对称涡控制技术可以有效抑制细长旋成体背风区涡系造成的随机侧向力和偏航力矩,避免“魔鬼侧滑”现象[14-15]。旋涡主导了战机大迎角绕流状态及其发展,如何准确预测非定常气动力对飞行器运动状态的影响并加以控制,首先需要感知主导战机绕流的旋涡特性。
常规空间旋涡结构识别技术主要依靠空间速度分布信息通过涡识别算法实现,但实际飞行过程测量机体周围速度场存在较大的困难,无法准确识别空间旋涡结构。表面压力测量技术作为研究旋涡与表面相互作用的重要测量手段,其飞行实测技术相对成熟,实现难度较小。因此,基于表面压力信息的空间旋涡识别是未来飞行器进行空间流场感知的一种可行方法。
空间绕流在物体表面形成相应的流动结构,不同的流动结构会表现不同的表面压力分布特征。反之亦然,表面压力分布可以反映出与表面相互作用的空间绕流特性,进而推测飞行器的气动特性。陈尹等[16]研究发现表面压力曲线分布与前缘涡的发展相关,对于80°/48°双三角翼,通过x/c=0.8 位置的特征截面展向压力积分得到的滚转力矩系数CLsec,在迎角0°~50°范围内,与模型整机受力存在相关性,可以反映该模型滚转力矩受力变化。基于此观点,顾蕴松等[17]给出了一种基于飞行状态感知的智能飞行器设想。
在旋涡与表面相互作用的研究过程中,一些空间流动结构与表面压力分布特征之间的函数关系逐渐被建立起来。Wittmer 等[18-19]研究直升机叶片与流向旋涡的相互作用时发现:垂直于流向的截面压力系数分布近似于高斯分布。Booth[20]的研究明确表示:周期性变化的流向涡与二维翼型相互作用,沿弦向分布的压力脉动幅值是表面和旋涡之间相对位置的强函数;二维翼型气动载荷的脉动幅值是入射涡强度和表面平均 气 动 载 荷 的 耦 合 函 数。Schreck 和Helin[21]通过表面压力分布和空间流动测量对超过失速迎角后直机翼表面非定常旋涡流动进行详细描述。Marks 和Sondergaard[12]通 过 表面 压 力 峰 值 所 在位置表征(折痕法)旋涡发展中涡核中心在表面上投影位置,如图1 所示。上述研究结果表明表面压力分布和空间涡存在关联关系,其他除涡核中心投影位置外的特征未给出明确表征方法。Greenwell 和Wood[22]通 过 三 角 翼 表面 压 力 估 算前缘涡涡核中心位置和旋涡强度,但未给出实验验证。
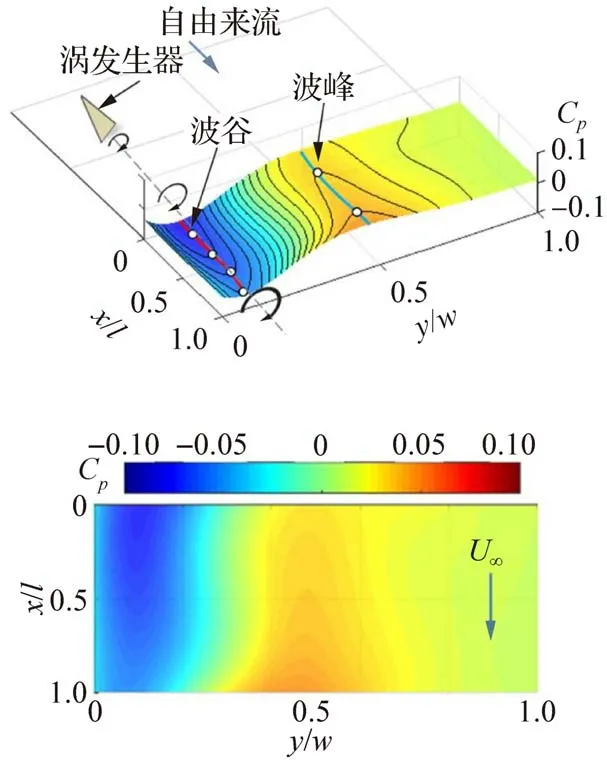
图1 折痕法判断流向涡涡核中心投影位置[12]Fig.1 Representations of wall pressure distribution adjacent to vortex[12]
综上所述,流向涡与表面相互作用的相关研究表明:物体表面的展向压力分布特性,是旋涡涡核中心高度和强度对表面共同作用的结果;虽然通过表面压力分布可以判断流向涡涡核的发展轨迹在表面上的投影位置,但由于旋涡强度和高度对表面压力的影响相互耦合,因此通过表面压力分布辨识旋涡的强度和高度位置信息的研究尚不多见。
本文旨在发展一种基于表面压力信息的流向旋涡空间位置和强度特征的识别方法。以空间无限长线涡为基本物理模型,并以“镜像涡”理论进行修正,建立基于表面压力信息的空间旋涡识别方法。搭建涡-面干扰试验研究平台,采用风洞试验研究手段,测量表面压力和空间流动结构,验证旋涡识别结果,进行相关性分析和误差分析。以期为感知飞行器周围旋涡流动结构,以及实现飞行器气动力的预测奠定重要的技术基础。
1 模型与试验技术
1.1 低湍流度风洞
相关试验在南京航空航天大学1 m低湍流度回流式风洞进行。风洞开口试验段横截面为1.5 m×1.0 m 的长方形,试验段长1.7 m,风洞收缩比为6.25,试验段核心区湍流度ε=0.08%,稳定风速范围为5~40 m/s。整体结构如图2 所示。
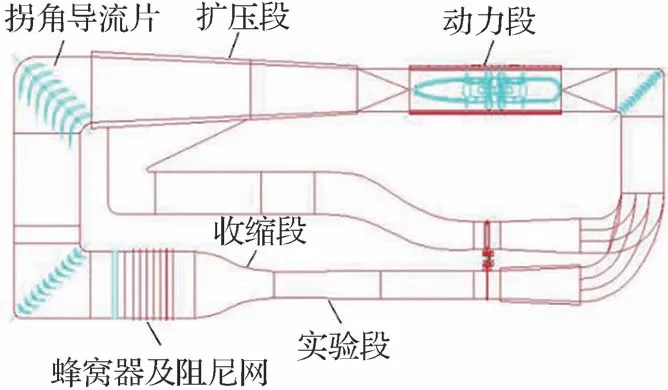
图2 1 m 非定常低湍流度回流式风洞Fig.2 1 m unsteady low turbulence recirculation wind tunnel
1.2 试验模型
平板流向涡发生器弦长c=150 mm,展长l=300 mm,与来流方向夹角定义为涡发生器迎角α。涡发生器安装在精密角位移台上,通过控制角位移台转动参数改变流向涡的强度Γ,通过精密电动位移台实现流向涡空间位置的改变。流向涡强度通过在垂直于流向截面对涡量分布积分获得[23],选取以涡核为几何中心、边长为2 倍涡核直径(涡核直径选择涡核两侧最大切向速度之间的间距)的范围作为积分范围(图3 中S所示区域),计算公式为
式中:ω为测量区域涡量;S为测量区域。
使用基于速度梯度张量特征值的涡识别方法Q准则[23]捕捉和识别流场的涡结构,选择特征值Q的最大值所在的空间位置作为涡核中心的实际位置。计算公式为
涡发生器置于平板上游,转动中心位于涡发生器的c/2 处,与平板前缘之间的距离为c。涡发生器上缘与平板表面高度通过调节精密高度位移台实现,从而改变空间流向涡与表面之间的距离h(见图4,涡核中心与平板上表面的法向距离)。
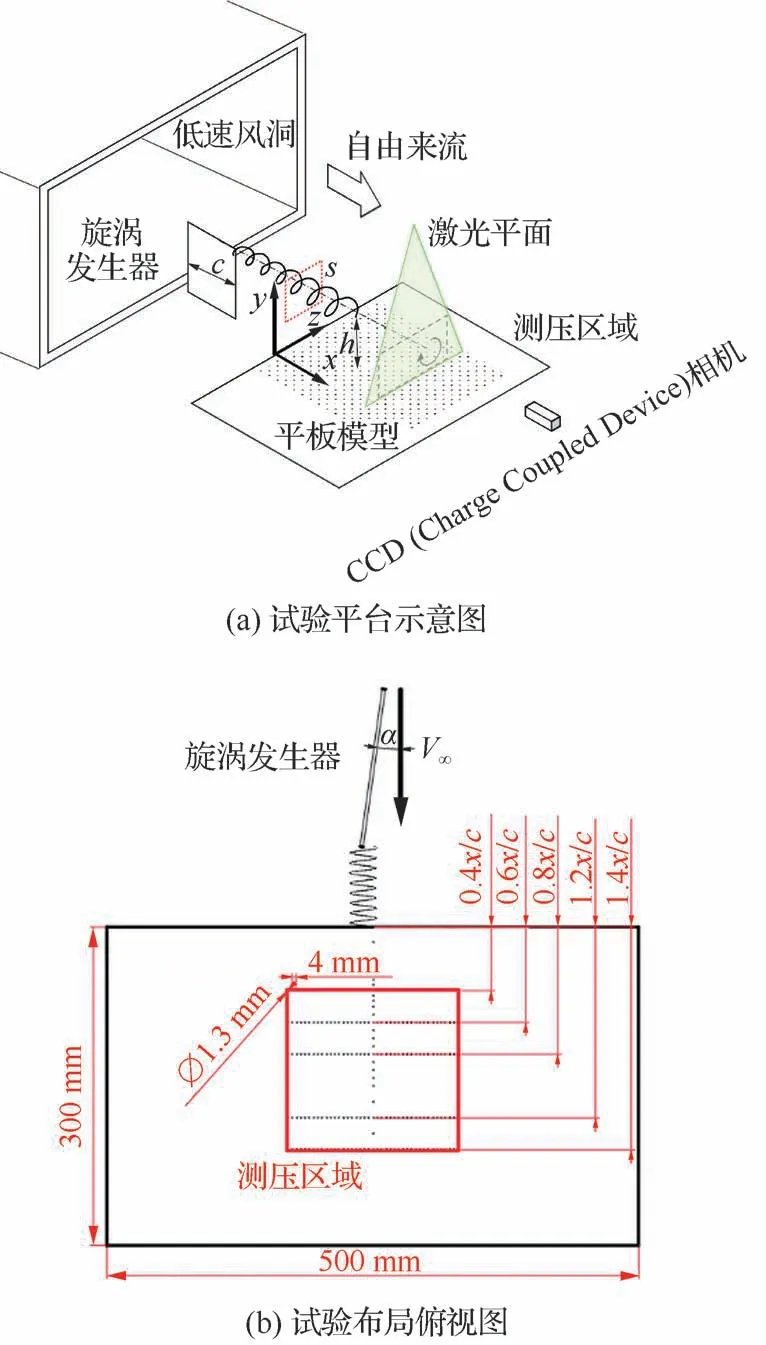
图4 流向涡与表面相互作用试验布局图(俯视图)Fig.4 Experimental setup of streamwise vortexsurface interaction
与流向涡相互作用的物面为一金属平板模型,模型弦长300 mm,展长500 mm,两侧布置端板用于减小平板两侧气流三维效应对中心区流动的影响。平板表面布置有测压孔,孔位展向间隔4 mm,弦向位置根据旋涡发展阶段[24]选择相应的测量位置。测压孔通过测压软管与压力传感器相连接,用于平板表面压力的动态采集。
测量坐标系在图4 中标注,坐标原点位于平板前缘中心,x轴沿平板上表面与来流方向一致,y轴指向平板法向,z轴指向平板右弦。
1.3 PIV 测试技术
粒子图像测速技术(Particle Image Velocimetry,PIV)是一种瞬态、多点、无接触式的激光流体力学测速方法,广泛应用于各类风洞试验流场测量研究工作[25]。
示踪粒子采用有机油雾,平均例子直径小于10 μm,使用双脉冲激光照亮粒子,激光平面垂直于气流方向。实验相机使用2 048 像素×2 048像素的CCD(Charge Coupled Device)阵列。速度矢量参数计算采用查问域16 像素×16 像素,互相关算法空间重叠50%,最大透视误差小于5%。PIV 拍摄两帧照片间隔30 μs,采样频率5 Hz,测量截面结果由120 张结果图片计算所得。
为研究不同流向涡强度Γ(旋涡发生器角度α)以及入射高度h条件下空间结构特征和表面压力分布特征的相关性,在来流条件15 m/s(雷诺数Re=3.21×105)的条件下,分别对h=0.1c,0.2c,0.3c,α=8°,12°条件下的流场进行定量测量。
1.4 表面压力测量技术
表面压力测量采用南京航空航天大学空气动力学实验室研制的GYS-Ⅳ型多通道压力传感器,量程±1 034 Pa,测量精度0.3%F.S,测量通道64 个,动态采样率达1 kHz。
依托NI 数据采集系统搭建压力测量系统可得平板表面测压点的压力值pi,该点压力系数为Cps,i,计 算公式为
式中:ps为实验段静压;ρ为气流密度。
2 基于表面压力信息的空间涡识别方法
在与流向涡相互作用过程中,物体表面的压力分布受到空间流向涡的影响,当旋涡特征发生改变时,表面压力分布特征也随之发生变化,两者之间存在复杂的映射关系。本文主要基于单涡模型建立物体表面压力分布和流向涡结构特征之间的映射关系,通过表面压力进行流向涡特征识别。
流场中由于旋涡存在而产生的速度称为诱导速度(Induced Velocity)。在不可压、无黏流体中,根据比奥-萨伐尔定律(Biot-Savart Law)无限长涡线所引起的诱导速度场可以看作平面点涡流动,强度为的平面点涡对平面内任意点产生的诱导速度为
式中:r为平面内任意点与平面点涡之间的距离。
对于流体密度为ρ∞、速度为V∞的自由来流,其动压q∞和无量纲压力系数Cp计算公式为
理想不可压流体的定常无旋空气流动的伯努利方程为
式中:p为 当 地 静 压;V为 当 地 速 度;p0为 当 地总压。
以平板表面为对称面,假设空间内存在一个与流向涡线镜面对称的虚拟“镜像涡”,流向涡线与“镜像涡”对平板表面产生平行于表面的诱导速度(见图5)。
结合“镜像涡”理论计算平面内对称面上任意点压力系数为
式中:V为对称面上的该任意点的当地速度;h为平面点涡距离对称面的高度;d为平面点涡在对称面上的投影与该任意点之间的距离;0.5Γ为平面点涡强度,见图5。式(8)计算所得平面点涡诱导作用下的对称面压力系数分布如图6 所示。

图5 涡-面相互作用中“镜像涡”示意图Fig.5 “Mirror vortex” diagram in vortex-wall interaction

图6 平面点涡诱导表面压力系数分布曲线Fig.6 Pressure coefficient induced by point vortex
当对称面上任意点(即图5 中测量位置)位于平面点涡在对称面上的投影时,该点的压力系数表现为压力系数曲线的峰值,计算公式为
若该任意点与平面点涡在对称面上的投影之间的距离d等于平面点涡距离对称面的高度h,此时的压力系数为
比较式(9)、式(10)表明:在理想不可压无黏空气流动中,当该任意点与平面点涡在对称面的投影之间的距离d等于平面点涡距离对称面的高度h时,该点的压力系数是平面点涡在对称面投影位置处压力系数值的25%。
因此,在流向涡作用下的表面压力系数曲线中,找到峰值所对应的位置和峰值的25%所对应的位置,此二者之间的距离等于平面点涡距离对称面的高度h(见图7),已知来流速度情况下,再由高度h和压力系数曲线峰值代入式(9)可以获得平面点涡强度。

图7 基于表面压力信息的空间涡识别方法示意图Fig.7 Diagram of vortex identification method based on pressure information
至此,平面点涡的空间位置特征(平面点涡距离对称面的高度h和平面点涡在对称面的投影位置)和强度特征均可由该平面内对称面的压力分布曲线获得。
3 结果分析
3.1 涡-面干扰流场特征
平面点涡和镜像涡理论是建立在不可压、无黏流体中的无限长涡线模型,因此仍需要对基于表面压力信息的空间涡识别方法在实际应用过程中的有效性和误差进行实验验证。
孙之骏等[24]开展的涡-面干扰实验研究结果表明,与表面相互作用的流向涡的发展状态可划分为起始阶段、发展阶段和耗散阶段,流向涡涡核参数变化曲线如图8 所示,发展状态较为稳定。根据微分思想和Bodstein 等[26]的研究基础,可将局部范围内的流向涡近似为空间无限长线涡与表面的相互作用。
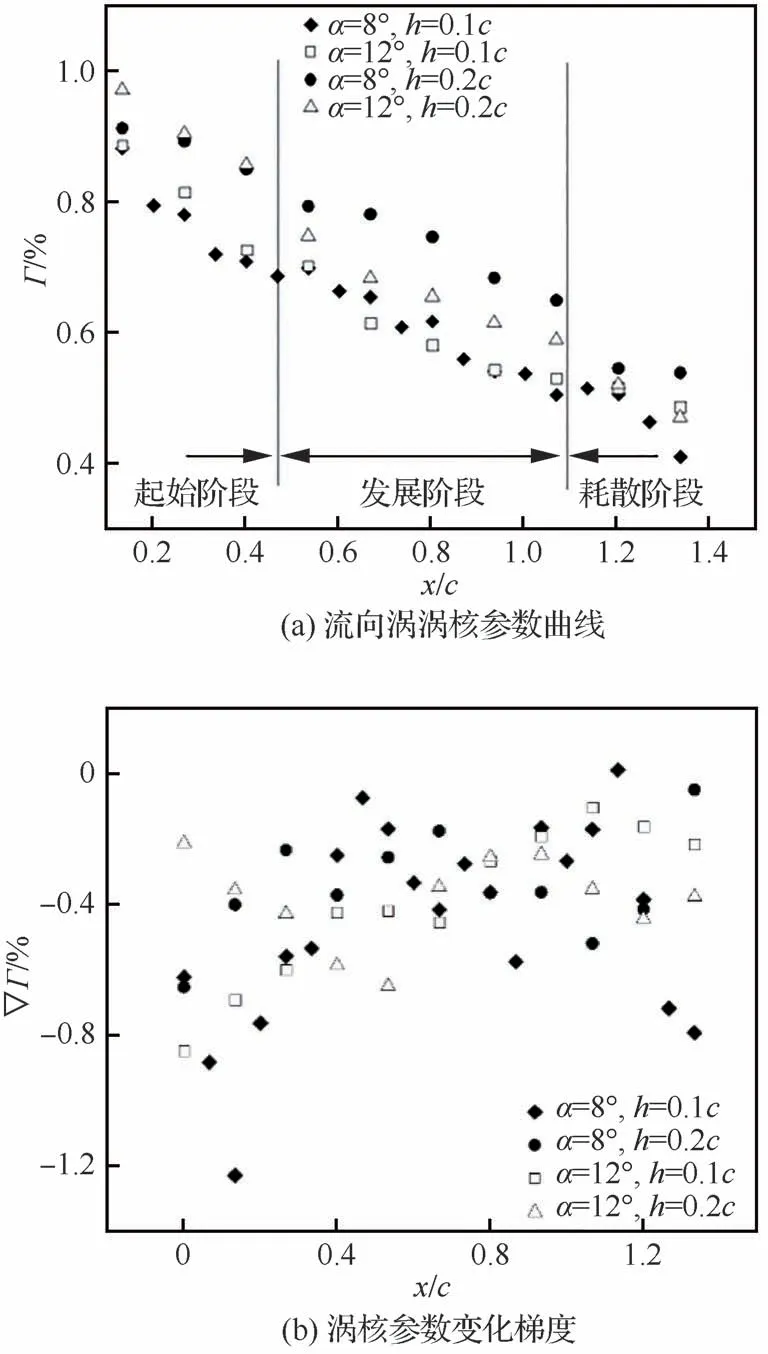
图8 流向涡涡核参数曲线[24]Fig.8 Parameter curves of vortex core[24]
由于平面点涡和镜像涡理论的假设条件,基于表面压力信息空间涡识别方法的应用,需要旋涡空间结构稳定。搭建了与孙之骏等[24]涡-面干扰研究中流向涡和表面相互作用相同的实验模型,采用压力测量系统和PIV(Particle Image Velocimetry)空间流场测量系统,压力测量系统采样频率1 000 Hz,PIV 采样频率5 Hz。研究流向旋涡不同发展阶段的空间结构特性,并验证该方法的可行性,本文选择的特征截面如表1所示。

表1 平板模型表面测压孔截面弦向位置Table 1 Position of pressure taps along span on port surface
采用粒子图像测速技术拍摄测量截面的空间流动结构,测量结果使用本征正交分解(Proper Orthogonal Decomposition,POD)进行分析。当雷诺数Re=3.21×105、来流速度15 m/s、测量截面位于x=1.4c、涡发生器上缘距离表面0.2c、涡发生器与来流夹角α=12°时,将PIV 测量结果进行POD 分解。流向涡分解后的各阶模态如图9所示,各阶模态特征能量占比如图10所示。
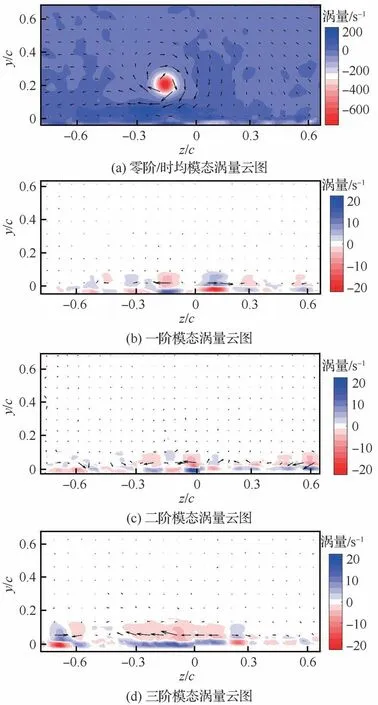
图9 POD 分解后模态Fig.9 POD decomposed modality
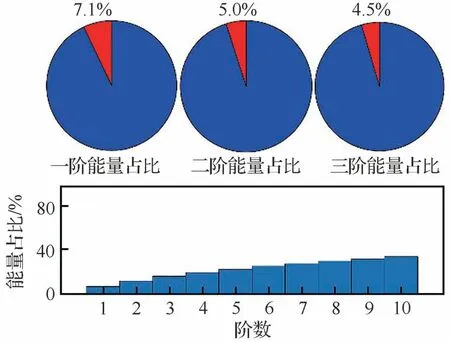
图10 流向涡结构模态特征Fig.10 Vortex modal feature
实验结果表明:入射涡强度和高度维持稳定的情况下,垂直于流向的截面,空间流动的非定常部分能量占比较小,流向涡的空间流动表现出准稳态特性。将不同截面位置处不同实验工况的PIV 测量结果均使用POD 分析,获得与上述一致的实验结论。
为进一步验证上述实验结论,将PIV 测量所得的空间速度场应用Q准则计算相应的旋涡结构,采用3δ准则确定涡核中心的跳动范围。图11为Re=3.21×105、来流15 m/s、测量截面位于x=1.4c、涡发生器上缘距离表面0.2c、涡发生器与来流夹角α=12°时的数据处理结果,提取空间涡核中心位置进行位置和频率分析。
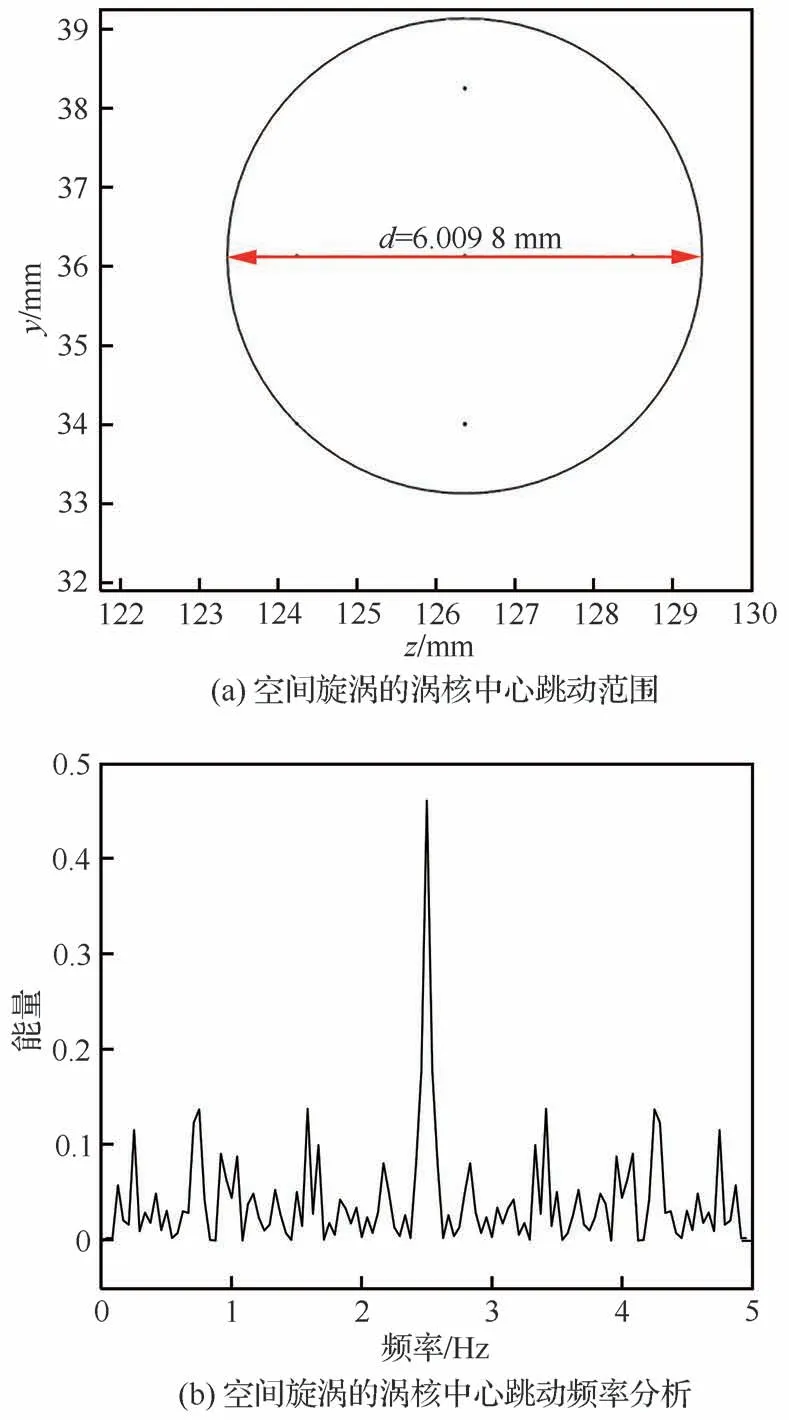
图11 空间旋涡涡核中心位置分析Fig.11 Analysis of position of space vortex core
实验结果表明涡核中心跳动范围约为旋涡作用半径的10%,进一步验证了流向旋涡空间结构的准稳态特性。
综上所述,与平板表面相互作用的流向旋涡空间结构表现出准稳态特性,旋涡涡核中心的空间位置发生着小范围内的低频跳动。涡-面干扰实验模型由于其准稳态特性可以使用基于表面压力信息的空间涡识别方法进行流向涡特征识别。
3.2 涡识别方法实验验证
基于表面压力信息的空间涡识别方法可以通过表面压力系数曲线辨识流向旋涡强度特征和涡核中心空间位置,涡-面干扰的实验模型可以使用该识别方法辨识流向旋涡特征。
孙之骏等[24]的研究结果表明:流向涡在与平板的相互作用过程中,在表面附近形成二次涡结构,其旋转方向与主涡方向相反,旋涡尺度与强度较小,在相互作用过程中随着流动向下游发展很快衰弱,如图12(a)所示。平板表面的二次涡结构会在表面压力曲线中体现,根据二次涡所在位置表面压力系数曲线可定义为近二次涡侧和远二次涡侧,如图12(b)所示。
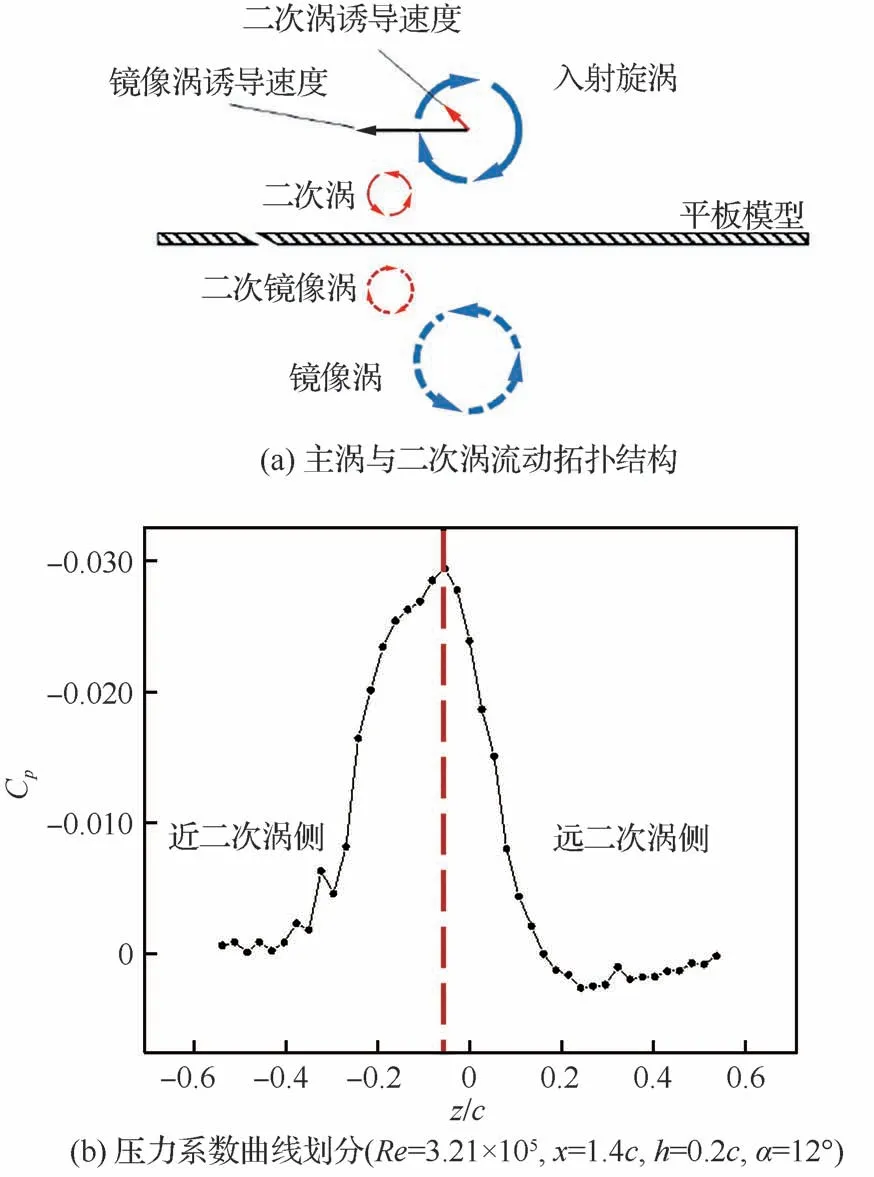
图12 主涡与二次涡诱导压力分布曲线示意图Fig.12 Pressure distribution induced by the primary vortex and the second vortex
图13 中流向涡涡核结构是PIV 测量结果使用Q准则计算所得,测量截面旋涡涡核中心位置由Q值最大位置表征,涡核强度通过对测量截面涡量积分获得。
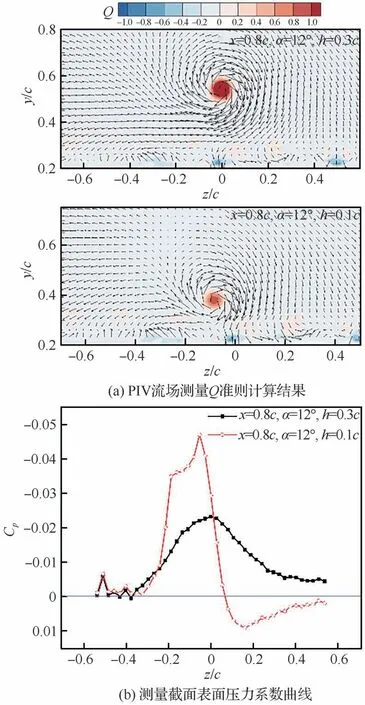
图13 测量截面空间涡结构和表面压力系数曲线(Re=3.21×105)Fig.13 Vortex structure and surface pressure coefficient curves (Re=3.21×105)
图13(b)给出了测量截面压力系数曲线,比较了不同入射高度h下压力系数时均值分布,可以看出入射高度较低时形成的集中负压影响程度更大。随着流向涡的靠近,平板表面与旋涡相互作用产生的二次涡强度逐渐增强。二次涡强度与主涡强度比值超过某一临界值时,二次涡无法被忽略,通过平面单一点涡所建立的基于表面压力信息的旋涡识别方法将产生较大误差。
对比不同试验工况表面压力系数分布特性发现:当旋涡位置靠近平板表面且旋涡强度较强时(如x=0.8c,α=12°,h=0.1c),表面压力系数远二次涡侧会出现系数大于0 的部分正压区,见图13(b)。这是由于此时旋涡相对而言更靠近表面,旋涡与平板表面的相互作用更强,旋涡诱导的下洗气流撞击平板表面形成压力系数曲线远二次涡侧的正压区,如图14 所示。
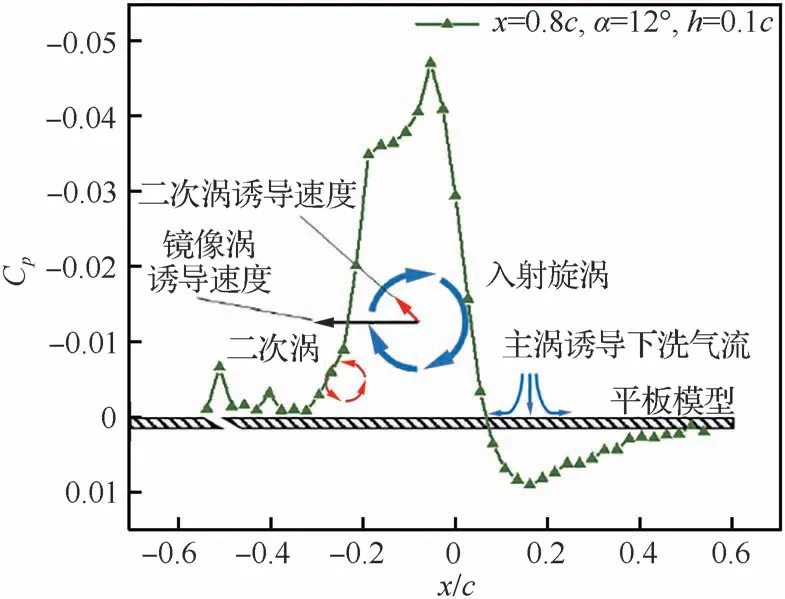
图14 “近物面流动”模型示意图Fig.14 Schematic diagram of “near-surface flow”
根据表面压力系数曲线远二次涡侧是否存在正压区域可将流向旋涡状态划分为“近物面流动”和“远物面流动”。α=12°,h=0.3c时表面压力系数曲线远二次涡侧不存在明显的正压区域属于“远物面流动”状态,见图13(b),在这种状态下,平板表面展向压力曲线变化平缓且峰值低。
采用基于表面压力信息的空间涡识别方法处理压力系数曲线,分别计算不同测量截面下不同入射流向涡的空间位置和强度,与PIV 测量结果进行比对结果如表2 所示。
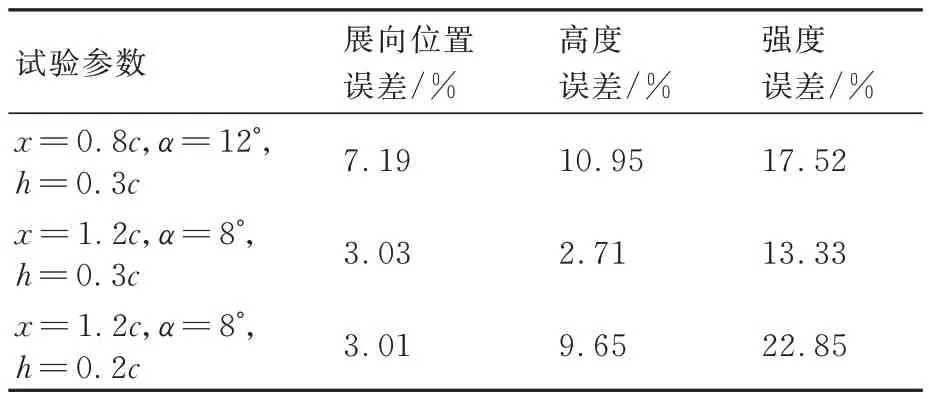
表2 基于表面压力信息的旋涡识别结果误差(Re=3.21×105) Table 2 Errors of vortex identification method based on surface pressure information (Re=3.21×105)
Greenwell 和Wood[22]在 解 耦 细 长 三 角 翼 前缘高度的相关研究中,通过建立单涡物理模型以压力系数峰值1 2 带宽表征前缘涡的涡核中心距离上翼面的高度。该方法被用在70°后掠角三角翼前缘涡的识别,产生的高度误差约为30%,涡核中心投影位置的误差约为6%;当该方法被应用于80°后掠角三角翼前缘涡的识别,产生的高度误差约为20%,涡核中心投影位置的误差约为16%。
本 文 识 别 结 果 较Greenwell 和Wood[22]三 角翼前缘涡高度识别精度高,且增加了旋涡强度识别。造 成Greenwell 和Wood[22]的 识 别 结 果 误 差偏大的原因是大后掠三角翼前缘涡涡对距离较近,另一侧的对向涡影响无法忽略。
整理不同测量截面不同入射参数的流向涡表面压力测量结果,压力系数曲线以近二次涡侧和远二次涡侧分别计算截面旋涡位置和强度,计算识别结果与PIV 测量结果相关性结果如图15所示。图中Instantly 表示与PIV 瞬态测量结果对比,Statistics 表示与PIV 的120 张图像的平均测量结果对比。
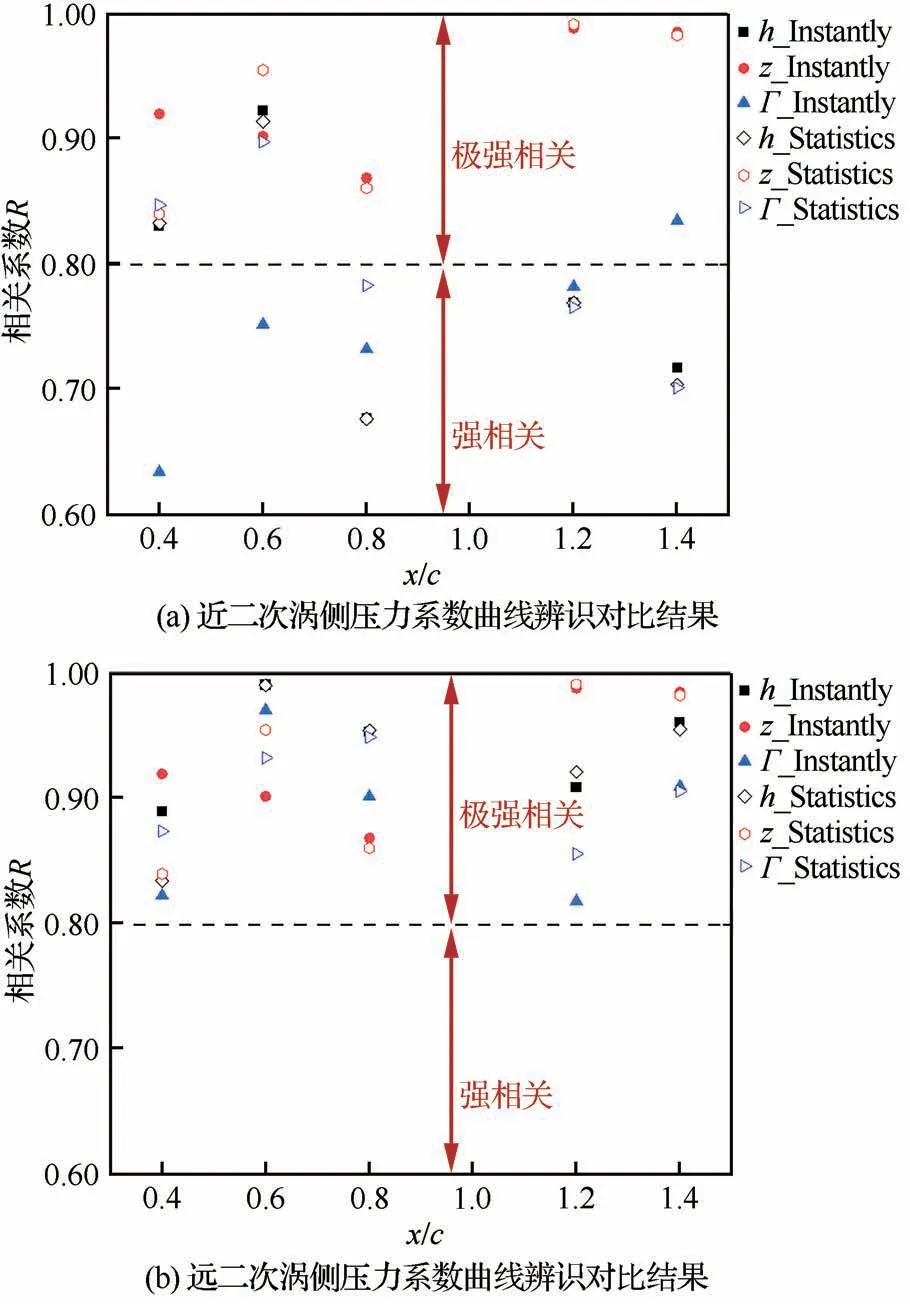
图15 不同弦向位置横截面空间涡辨识结果相关性分析Fig.15 Correlation analysis of spatial vortex identification results in different cross-sections
图15 中压力系数曲线远二次涡侧辨识结果处于极强相关区域(R=0.8~1.0)的占比远大于近二次涡侧。图15(a)近二次涡侧压力系数曲线辨识结果相关性分析发现,各截面强度辨识结果相关性低于远二次涡侧,且大部分处于强相关区域(R=0.6~0.8),0.8c、1.2c、1.4c截面位置的高度辨识结果均处于强相关区域。图15(b)远二次涡侧压力曲线辨识结果相关性分析各项均处于极强相关区域。结果表明,由于二次涡对表面压力系数曲线的影响,压力系数曲线远二次涡侧所解算截面流向旋涡特征与PIV 流场测量结果相关性更好。
总结不同入射参数的流向涡识别结果,基于表面压力信息的空间涡识别方法的主要误差来源有以下3 个方面:
1) 测压孔间距影响压力系数曲线空间分辨率,造成旋涡特征识别的误差。
2) 在测量截面对涡量分布积分获得旋涡强度,使用Q 准则计算得到的特征值的最大值位置表征旋涡的空间位置,可能存在偏差[21],是误差来源之一。
3) 基于表面压力信息的空间涡识别方法忽略空间其他流动结构,会在涡识别过程中产生一定误差。
研究发现,仅从压力曲线信息出发,压力系数曲线以峰值所在横坐标为分界点,“近物面流动”状态的压力系数曲线较为平缓的是近二次涡侧,较为陡峭的是远二次涡侧,见图12;“远物面流动”状态的压力系数曲线较为平缓的是远二次涡侧,较为陡峭的是近二次涡侧,见图13(b)。通过表面压力系数曲线远二次涡侧是否存在明显正压区域判断“近物面流动”和“远物面流动”,见图14。为减小二次涡对识别结果影响,本文建立的基于表面压力信息的空间涡识别方法以压力系数曲线远二次涡侧对“远物面流动”状态的流向涡强度和高度特征进行辨识,对于“近物面流动”仍需要进一步完善涡-面干扰物理模型和辨识方法对旋涡特征进行准确辨识。
4 结 论
发展了一种基于表面压力信息的空间旋涡识别方法,并利用风洞试验技术验证了该方法的有效性,研究结果表明:
1) 流向旋涡与平板表面相互作用的物理模型,可以通过平面点涡和镜像涡理论建立基于表面压力信息的空间流向涡识别方法。
2) 搭建涡-面干扰实验平台,采用表面压力测量实验和空间流场测量实验,验证了基于表面压力信息的空间涡识别方法的可行性。
3) 根据黏性产生二次涡的位置将表面压力系数曲线划分为近二次涡侧和远二次涡侧,根据表面压力系数曲线远二次涡侧是否存在明显正压区域划分为“近物面流动”和“远物面流动”;本文研究单涡-物面干扰模型建立的空间涡识别方法更适用于“远物面流动”空间涡状态识别。
涡-面相互作用的研究有助于理解飞行器复杂绕流条件下涡系的生成与发展机制,以及对飞行器气动特性和运动特性的影响规律。建立复杂空间涡系、物面载荷、飞行器气动力以及运动姿态间的物理关系,实现基于状态感知的智能飞行器设计。本文通过与流向涡相互作用的平板表面的压力系数曲线实现流向旋涡空间结构特性(位置特性和强度特性)的识别,建立空间涡系和物面载荷的物理关系。今后需进一步开展以下工作:
1) 完善基于表面压力信息空间涡识别方法的模型,建立“近物面流动”高精度旋涡特征识别方法,提高准确性。
2) 通过双涡-物面干扰模型建立基于表面压力信息的空间双涡特征识别方法。
3) 基于表面压力信息进行三角翼前缘涡的状态识别,实现流场重构,关联三角翼前缘涡流动状态和气动特性,预测三角翼气动力和气动力矩。
