基于负载前馈变排控制的泵控马达系统仿真研究*
2023-04-14刘志文关中原
刘志文,关中原
(1.长沙理工大学汽车与机械工程学院,湖南 长沙 410114;2.长沙理工大学城南学院,湖南 长沙 410015)
在一些移动车辆中,例如工程移动车辆通常由液压系统驱动行走轮,用电控系统进行控制,并借助液压系统对行走轮进行制动[1]。现有机电液系统驱动行走轮的驱动闭合回路中,利用液压泵与液压马达作为液压驱动回路中的动力元件与执行元件,利用踏板、制动钳作为液压制动回路的控制元件与执行元件,但当再制动时,势必会导致驱动回路中马达转速降低,而泵的输出量不变,使得工作管路压力骤然增大,驱动装置将承受很大冲击[2-5]。
为解决现有机电液系统中由于制动时驱动回路液压油压力出现骤然上升而导致液压元件损坏的问题,拟提出一种基于负载前馈控制的实时变排液压驱动系统,以获得更高的灵敏性、安全性和效率。
1 泵控马达系统非线性数学模型
变量泵-变量马达串联系统如图1 所示,给予变量泵一定转速wp,外界施加于系统的负载为Tm,通过动态调节变量泵排量Vp以及变量马达排量Vm,来得到预期的系统负载扰动响应特性。
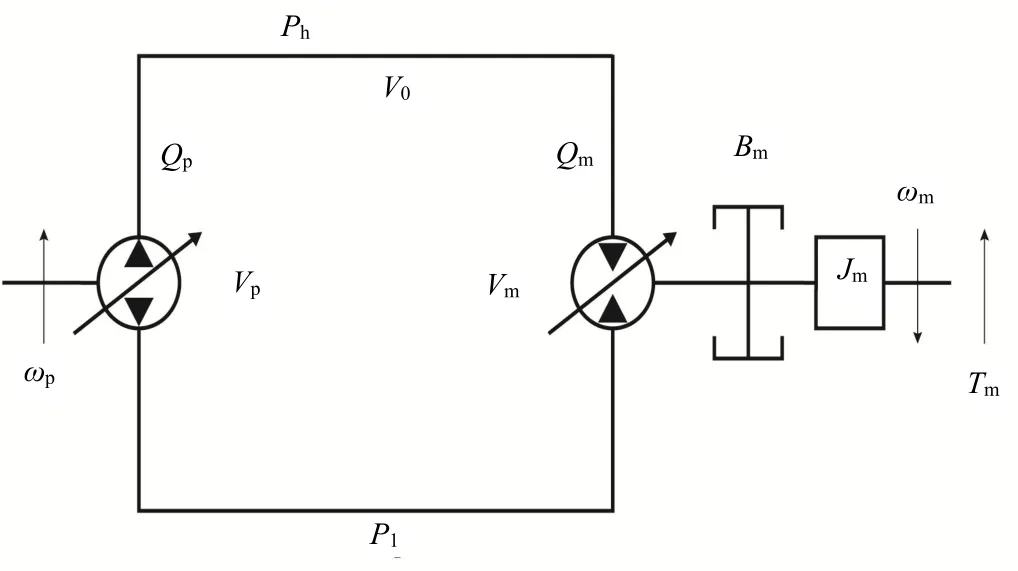
图1 泵控马达串联系统结构图
1.1 变量泵流量方程
变量泵流量方程为:
式(1)中:ωp为变量泵转速,rad/s;Cip为变量泵内泄漏系数;Ph为变量泵高压腔压力,Pa;Pl为变量泵低压腔压力;Cep为变量泵外泄漏系数;Vp为变量泵排量,Pa;γ为变量泵斜盘倾斜角。
1.2 变量马达流量方程
变量马达流量方程为:
式(2)中:ωm为变量马达转速,rad/s;Cim为变量马达内泄漏系数;Cem为变量马达外泄漏系数;Vm为变量马达排量;α为变量泵斜盘倾斜角。
1.3 流量连续方程
变量泵-变量马达系统高压腔管内的流量连续性方程为:
1.4 变量马达力矩平衡方程
在不考虑负载弹簧刚度的情况下,有:
式(3)中:Jm为变量马达等效转动惯量;Bm为变量马达侧粘性阻尼系数;Tm为变量马达端负载力矩。
2 泵控马达负载前馈控制仿真
为解决液压驱动车辆因制动而导致系统压力骤升产生冲击的问题,提出基于负载前馈控制的控制方法[6-8],用以辅助车辆的制动,同时削减压力的冲击或将其保持在一定范围内。
2.1 前馈控制律
拟提出一种控制方案,即当制动力矩产生时,结合前面的排量调节特性,使泵排量减小、马达排量增大,调节量则采用基于负载力矩的比例调节来得到:
式(4)中:γd、αd为泵和马达斜盘的基础调节量;K1、K2为前馈增益。
2.2 仿真分析
基于Simulink 对前述非线性模型进行前馈控制仿真,仿真参数如表1 所示,仿真模型如图2 所示,采用2 种负载激励方式,分别模拟不同的制动模式,得到如图3 所示的仿真结果。

表1 仿真参数

图2 Simulink 负载前馈仿真模型
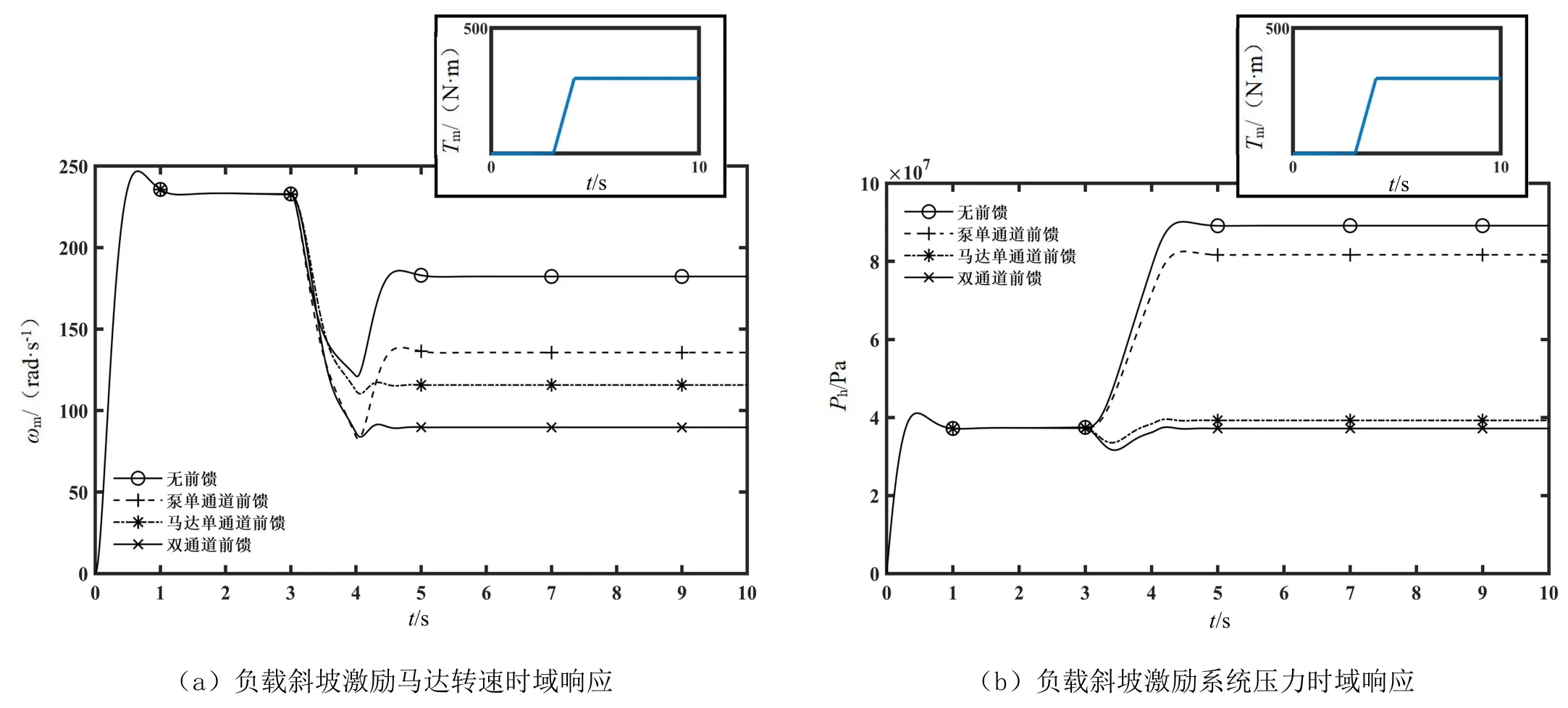

图3 负载前馈控制系统响应图
采用负载前馈控制下的系统压力和马达转速在一定程度下被削减,其中采用泵单通道前馈控制的模式后,马达的转速有明显的回弹效应,这是由泵自身的输出特性决定的[9]。采用双通道的负载前馈控制策略可以明显改善系统压力的响应特性,使系统压力不随负载(制动力矩)的加入而骤升,且保持在一定范围内,同时马达转速相对于其他控制策略它的下降速度提升了23.6%,稳态转速最低,这和驾驶员的制动意图是相吻合的,在抑制压力骤升的同时提升制动性能。
3 结束语
本文提出一种基于负载前馈控制的泵控马达系统的速度以及压力的控制方法,以解决因负载介入而导致系统压力骤升的问题,同时辅助制动,加快马达转速的下降。经过Simulink 仿真表明,通过负载前馈增益来动态调整变量泵和变量马达的排量,可使系统压力保持在一定范围内,有效抑制其增长,同时马达转速加速下降,可以很好地与驾驶员的制动意图相吻合。
