基于staimo软件系统的试航航速修正
2023-04-13黄建军李云军刘仕莲李辉孙文利李丽平
黄建军,李云军,刘仕莲,李辉,孙文利,李丽平
(中船黄埔文冲船舶有限公司,广东 广州 511462)
试航环境跟合同约定的航速环境不同,试航结果需经过修正[1],得到合同航速和EEDI 航速[2]。荷兰水池开发的STAIMO 具有航速修正功能[3],本文阐述在公司最近试航的商船中,应用STAIMO 进行航速修正过程。
1 规范要求的试航环境、条件、要求
规范对试航的环境因素、船舶状态、操作要求作了明确的规定,作为航速修正的先决条件和依据。
1.1 风力
试航时风力大小的限制跟船的两柱间长Lpp 有关:
Lpp100m: 风力应不大于蒲氏六级
Lpp<100m: 风力应不大于蒲氏五级
1.2 波浪
(1)波高Hw ≤1.5η 或3m 时,可以用目测法确定波高,否则要用浪高仪测量。
(2)若用浪高仪测量,则要求波高Hw ≤2.25η。
(3)理想的波高Hw ≤0.5η,此时,兴波阻力可以直接用船模试验数据,否则,要进行系列波谱测量。
1.3 潮流
EEDI 测速时,一个来回周期内的流速变化应不大于0.3 节,否则,需增加同一功率下的一个来回跑。
1.4 海域和水深
试航水深应大于以下两个公式计算结果中的大者:
若试航水深大于以下两者中大者,航速不需做浅水修正:
式中:B 为型深,[m];T 为船中平均吃水,[m];Vs 为船舶航速,[m/s];g 为重力加速度。
2 航速修正需准备的数据
2.1 船舶主尺度和主要技术参数
两柱间长Lpp、型宽B、型深D、设计吃水T、载重量、螺旋桨数量、主机型号、主机MCR 和NCR、螺旋桨轴效率和桨轴内外径及轴材料G-Modulus。
2.2 合同要求
航速和达到该航速时吃水、排水量、主机功率、螺旋桨转速、装载要求、sea margin、船舶状态、环境要求。
2.3 EEDI 测速要求
EEDI 速度下艏艉吃水、排水量,EEDI 功率(75%MCR)。
2.4 船模试验数据
船模在试航、合同、EEDI 要求下测速时装载状态,艏艉吃水、排水量,主机功率、转速、对应速度和ETAD 值。
2.5 实船测量数据
(1)船舶状态:艏舯艉吃水,排水量,水下横剖面面积,主船体湿表面积,附体湿表面积,横向受风面积。
(2)环境条件:天气情况,海域,气温,气压,水温,海水密度,水深,风速计高度,水流流向,流速。风速计安装高度是水线以上10m,否则,风速要进行高度修正与转化。
(3)实测数据(每个单程):测速开始时间、结束时间、测速距离,主机功率、扭矩、转速、油耗,航向,舵角,风速,风向,浪高、方向、周期,潮涌高、方向、周期。
3 航速修正
在得到试航数据后,需对数据进行检查和评估,明确修正范围和内容。比对船模试验项目,检查试航数据是否完整。
3.1 实船状态
实船尽可能接近船模试航工况,首部吃水与船模吃水偏差在0.1m 内;统计实船排水量,水下横剖面积,主船体和附体湿表面积,横向受风面积,实船排水量与船模排水量的偏差应在2%以内。
3.2 实船环境
海浪大于2 级,风力大于蒲氏3 级时[4],才需航速修正,实际操作是不管风浪流大小都修正到理想环境。如:
实船Lpp=176.8m,风速2.8m/s,属2 级风;波高1.5m,属3 级浪; 水深60.3m,规范水深3*SQRT(38.6*6.7)=48.25m,无需浅水修正,但风、浪、洋流要修正到理想环境。
3.3 航速修正流程
修正过程:基础数据准备—实船测量数据收集—功率的修正—航速的修正—得到结果,如图1,涉及功率、排水量、洋流、浅水及风浪流速方向角修正,水流方向、风向角、浪高和方向要转化为跟船航向一致,正向逆风为0 度,风吹右舷为正,左舷为负,流向和波浪方向同理。
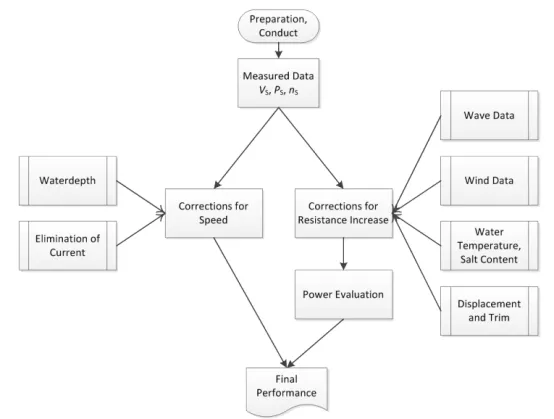
图1 试航航速分析流程
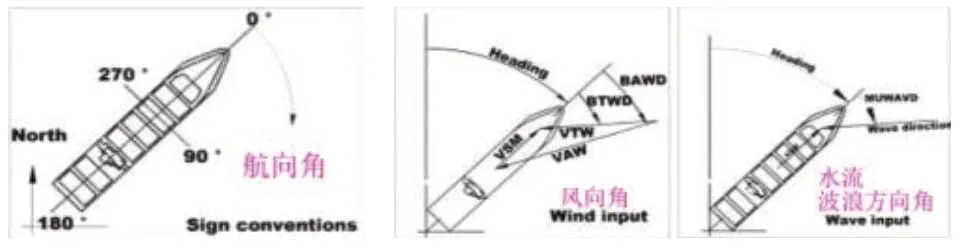
图2 航向角和方向角
3.4 利用STAIMO 进行修正
STAIMO 集成了规范要求及计算公式,关键要将上述数据按如下顺序输入系统以生成分析报告,顺序错误无法下一步:
3.4.1 系统初始化数据
垂线间长LPP,型宽B,螺旋桨数量,主机MCR,NCR,轴传输效率,轴内外径,轴材料G 模数。
3.4.2 试航工况初始化数据
EEDI测速,试航装载要求,艏吃水,艉吃水,排水量。
3.4.3 合同数据
合同航速,合同航速时主机功率、转速、装载要求、环境条件、艏吃水、艉吃水、排水量、主机功率sea margin。
3.4.4 EEDI 测速初始化数据
装载要求,艏吃水,艉吃水,排水量,EEDI 功率,Attained EEDI 航速(用规范要求Required EEDI 反推)。
3.4.5 船模报告数据
(1)船模试航数据 :装载,艏吃水,艉吃水,排水量,主机过载因子,各单程主机功率、转速、ETAD 值、航速。
(2)船模合同航速数据:装载,艏吃水,艉吃水,排水量,主机过载因子,各单程主机功率、转速、ETAD 值、航速。
(3)船模EEDI 测速数据:装载,艏吃水,艉吃水,排水量,主机过载因子,各单程主机功率、转速、ETAD 值、航速。
关键点:一般船模试验无耐波性和风洞试验,在船模数据输入时,不点选这两项,否则无相关数据,系统不运行。
3.4.6 试航实船数据
测速主机功率点必须在65%—100%MCR 间,一般以65%、75%、80%、100%MCR 为测速功率,首尾功率各一个来回跑,中间功率各二个来回跑。测速前记录艏艉吃水、测风仪高度、气温、水温、水密度、气压、水深,算出排水量,水下横剖面面积,主船体和附体湿表面积,横向受风面积。各单程记录:主机功率、转速、航速、开始时间、结束时间、航向、风速风向角、波高周期方向角、潮涌高周期方向角。

表1 实船试航数据
关键点:浪高仪点选,若波高超要求而没有浪高仪,系统认为数据错误而不运行。测速功率点不少于3 个,50%功率无效。功率点的设置跟来回跑的数量设置要一致。
3.4.7 修正结果
数据定义好后通过计算完成修正并生成模拟功率曲线得到合同和EEDI 速度并算出螺旋桨轻载因子,轻载因子在2%-9%比较合适,过小不利用于安全,过大不利于经济性。
4 结语
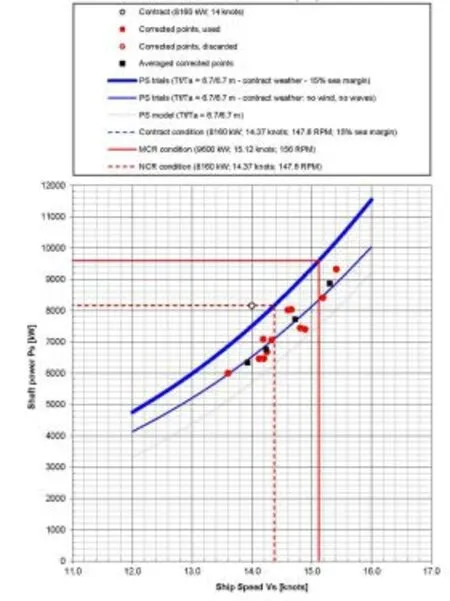
图3 功率-航速曲线
基于规范要求的船速修正,计算公式多而且非常复杂,稍有不慎就容易出错,借助于STAIMO 软件,可以得到很好的修正结果。测速功率点的设置,要满足性能测试和航速修正要求,功率点设置越多,功率-航速曲线越精确,得到的最终结果更准确,但功率点过多,加大试航工作量。STAIMO 通过模拟功率曲线准确找到合同功率点的速度,大大提高了航速报告完成效率。