基于电机驱动的水稻直播机PLC控制系统设计
2023-04-07彭菊生朱景建陈建能
彭菊生,朱景建,陈建能
(1.湖州职业技术学院,浙江 湖州 313000;2.浙江理工大学 机械与自动控制学院,浙江 杭州 310018;3.湖州市新能源电驱动技术重点实验室,浙江 湖州 313000 4.浙江省种植装备技术重点实验室,浙江 杭州 310018)
我国的主要粮食作物是水稻和小麦,目前,我国已经成为世界上水稻产量最多的国家,种植面积达到4.6亿亩[1]。近年来,农村劳动力大量向城镇流动且老龄化不断加剧,直接从事农业劳动的人力资源减少,土地资源逐渐集中,以移栽为基础的水稻精细化栽培方式成本高、效率低,受到了多重挑战,水稻生产渐而转向水稻直播栽培方式[2]。水稻直播是在夏熟作物让茬后将稻种直接播于大田的一种栽培方式[3],与移栽相比,它具有省工省劲、省秧田省成本等优点[4]。同时水稻直播对降低劳动强度、节约水资源、提高农业生产效率和增加农民收入有帮助[5]。水稻直播机最关键的技术在于水稻精密排种器,目前无调速模块和播种检测装置的水稻精密排种器无法根据水稻直播机的行进速度适时调整电动机转速,当然也就无法调整播种量,同时无法检测排种管是否堵塞,经常出现漏播、堵塞及播种量超标或不足等问题,造成缺苗断垄,使亩株数减少,严重影响农作物的产量。随着社会的发展和技术的进步,为了提高检测精度和播种质量,许多先进技术应用于精密排种器排种性能的检测中[6]。基于上述存在的问题以及智能化技术的发展,研制了基于电机驱动的水稻直播机PLC控制系统,以提高播种的质量和精确性。
1 系统装置结构与控制原理
1.1 系统装置结构
图1是基于电机驱动的水稻直播机的装置结构图,该装置包括传感器、控制系统及执行器。传感器包括种子面高度传感器、排种管检测传感器、地轮速度传感器和红外光电感应开关;控制系统包括水稻排种器控制器及步进电机驱动器;执行器包括报警器和步进电机。种子面高度传感器设于所述盖体的顶部,用于检测稻种在所述箱体内的高度;种子箱内的种子在重力及种子间的作用力作用下充入排种轮上的穴孔内,每个穴孔的种粒数量为5~7粒。排种器在控制系统控制的步进电机驱动下转动,带动穴孔内的种子运动,穴孔内的种子在重力的作用下落入排种管,种子在斜置的排种管内实现排序后依次流经排种管检测传感器,该传感器能测量种子的数量,由此实现播量的精确控制。
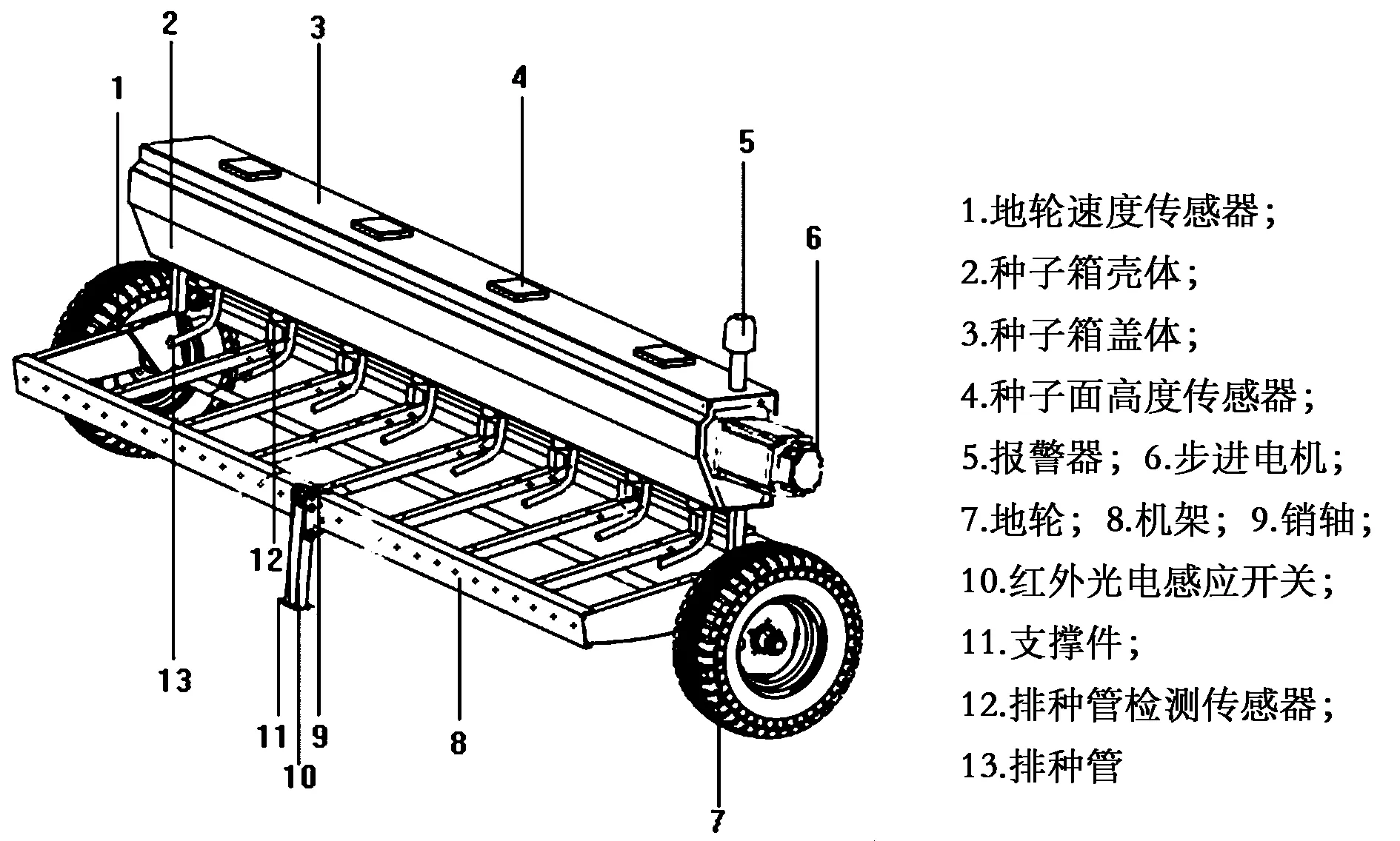
图1 基于电机驱动的水稻直播机的装置结构图
1.2 控制原理
基于电机驱动的水稻直播机PLC控制系统原理如图2所示,其采用地轮上安装霍尔速度传感器来检测拖拉机前进速度,PLC根据该信号从而控制步进电机,使水稻直播机排种速度与拖拉机前进速度协调,并可随时调节株距,从而使播种株距满足要求;采用电机转速传感器来实时监测电机转速,纠正偏差,自动校准,更准确地控制。采用水稻种子箱里安装激光测距传感器来不断测量种子面的高度变化,从而随时掌握种子箱的种子量,防止没有及时加种子;采用排种管里安装红外光电计数器检测排种的数量以及排种管是否堵塞,从而精确播种以及防止漏播;采用红外光电感应开关,监测各种特殊情况,比如农具抬起来的时候,自动关停电机,不下种。
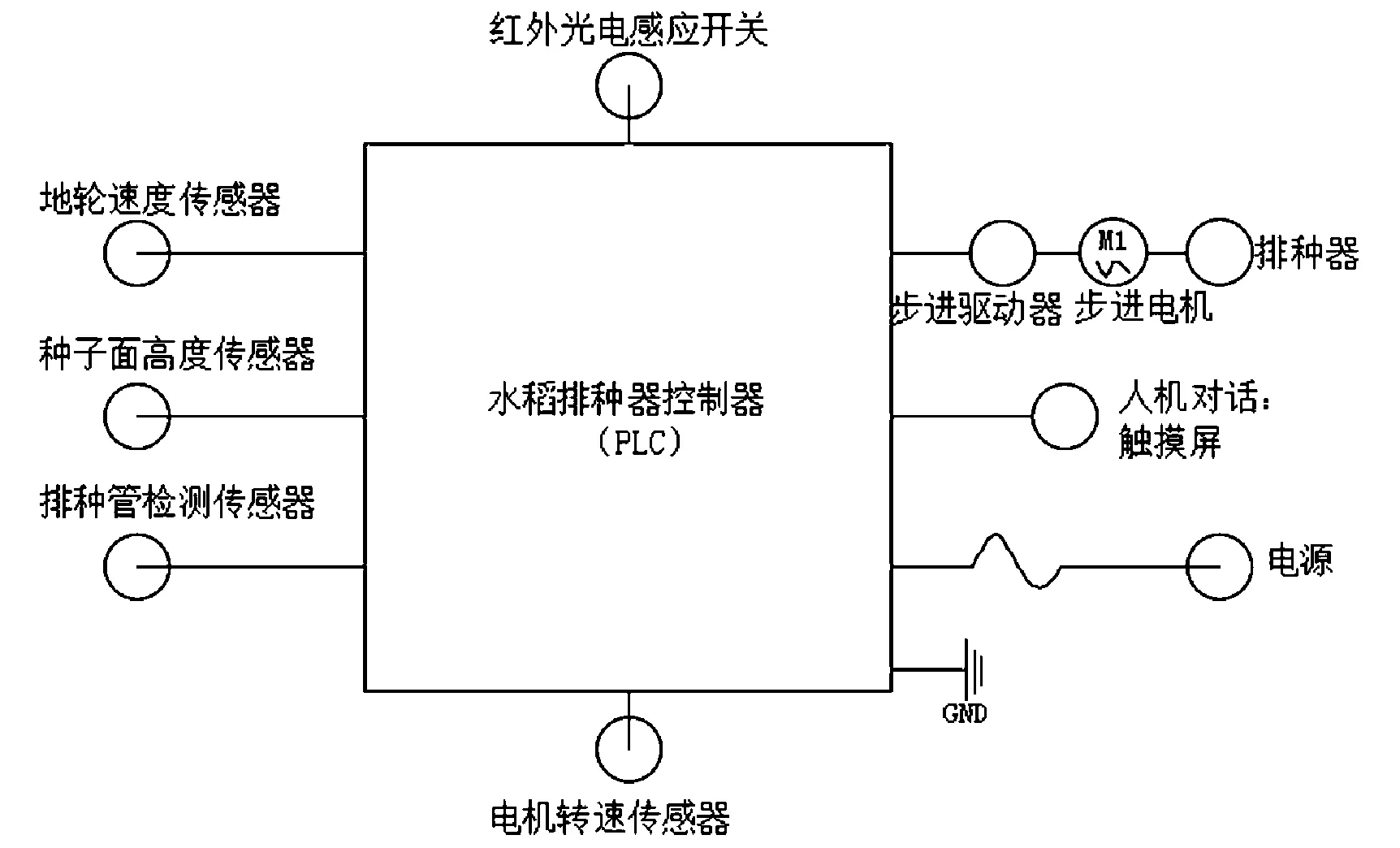
图2 基于电机驱动的水稻直播机智能化监测系统原理图
2 系统设计
系统的主要组成包括人机交互界面(HMI)、可编程序控制器(PLC)、驱动器和步进电机等。HMI是一种包含硬件和软件的人机交互设备,通过触摸屏写入工作参数或输入操作命令,实现人与机器信息交互。PLC依据传感器的数据发出脉冲信号,通过驱动器控制步进电动机的转速,从而控制排种速度。
2.1 水稻排种器控制器
水稻排种器控制器可以选择单片机或PLC。单片机虽然成本低,但是其稳定性还需要不断提高,单片机外围还要涉及很多的电子元件;而PLC相比单片机,具有故障率低、抗干扰能力强、高效的处理速度、精确的数据处理能力、易于设备的扩展、便于维护、开发周期短、优越的性价比等优点。目前非常多的控制装置采用PLC。而且PLC对步进电机具有良好的控制能力,只是无法进行直接驱动,而是需要通过步进电机驱动器来完成。本项目选择200 SMART系列PLC,它提供了脉冲调制(PWM)驱动步进电机。
2.2 步进电机驱动器
步进电机驱动器的作用是将PLC发出的电脉冲信号转化为角位移的执行机构。当驱动器接收到一个脉冲信号, 它就驱动步进电机按设定的方向旋转一个固定的角度(即“步距角”)。步进电机驱动器如图3所示,驱动器上的ENA为脱机信号(可不接),DIR为方向信号,PUL为脉冲信号,需要接到PLC的高速脉冲输出端口上。驱动器还需要对以下参数进行设置,具体参数可通过电机标签以及驱动器标注查看。步进电机驱动器的信号输入电压主要以5 V与24 V为主,PLC的信号输出电压为24 V,与SMART PLC进行连接时为共阴级接线。当选用24 V步进电机驱动器时可直接与PLC信号段进行连接,接线图如图4所示。
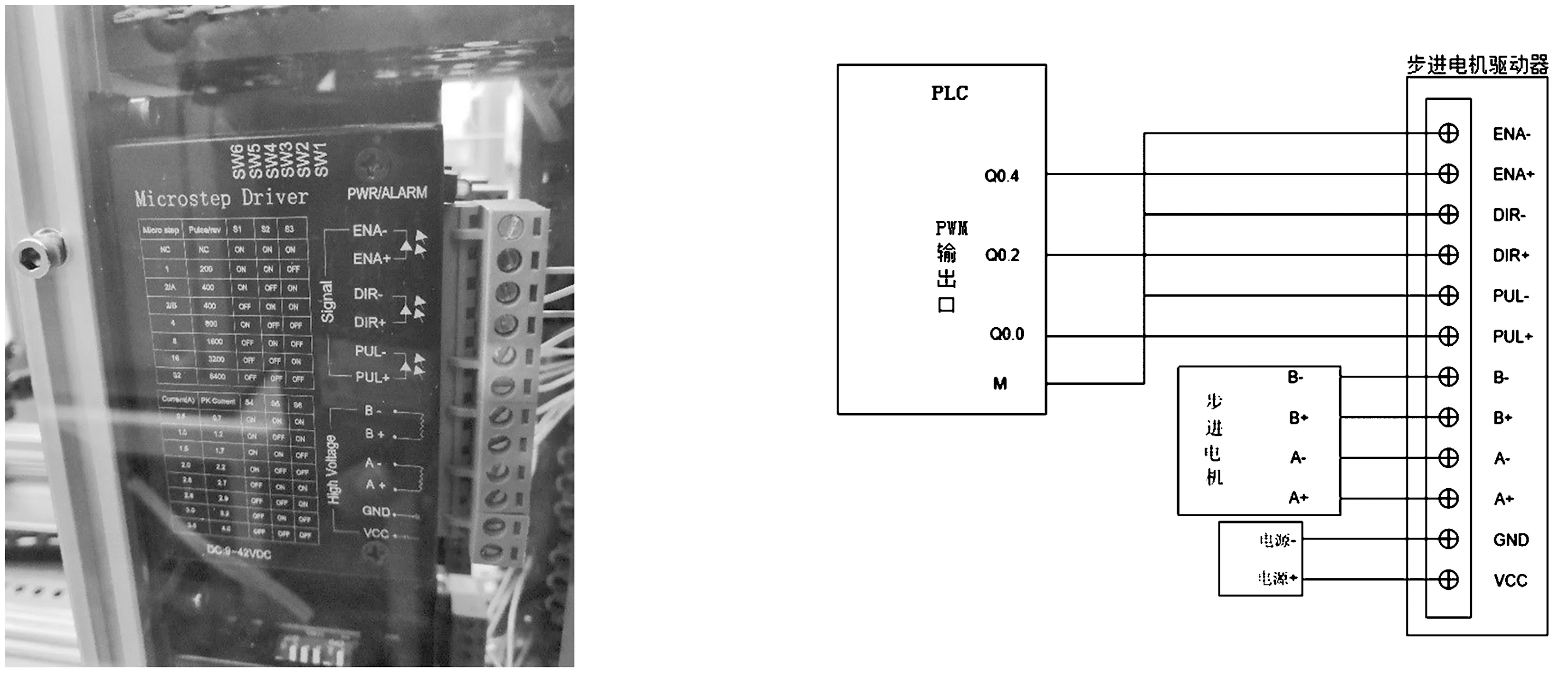
图3 电机驱动器 图4 PLC、驱动器和步进电机接线图
2.3 步进电机
步进电机具有无累积误差、跟踪性能好的优点[7],是运动控制领域的主要执行元件之一。它将电脉冲转变为角位移或线位移,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数量,不受负载变化的影响,即给电机一个脉冲信号,电机旋转一个步距角,所以PLC通过控制脉冲频率来控制电机转动的速度,从而达到调速的目的。因此PLC驱动步进电机主要依靠PLC的高速脉冲输出功能,200 SMART系列PLC最多支持3个高速脉冲输出,其具体输出数量取决于PLC的型号,如表1所示。

表1 PLC的型号对应的高速脉冲输出
2.4 地轮速度传感器
速度测量的方式很多,利用霍尔传感器对磁通量变化的感知能力测量是目前所普遍采用的一种。霍尔式转速传感器可用于检测各类旋转机械的转速,在水稻直播机中通过在其地轮上同轴安装信号转子,同时在合适位置安装能够检测到磁通变化的霍尔传感器,霍尔传感器对准信号转子安装,两者间隙在0.5~3 mm内。霍尔传感器的输出将随着水稻直播机行驶过程中地轮的转动而不断变化,它采集地轮带动信号转子转动产生的脉冲信号,发送给PLC控制器计算获得水稻直播机的行进速率,原理如图5所示。
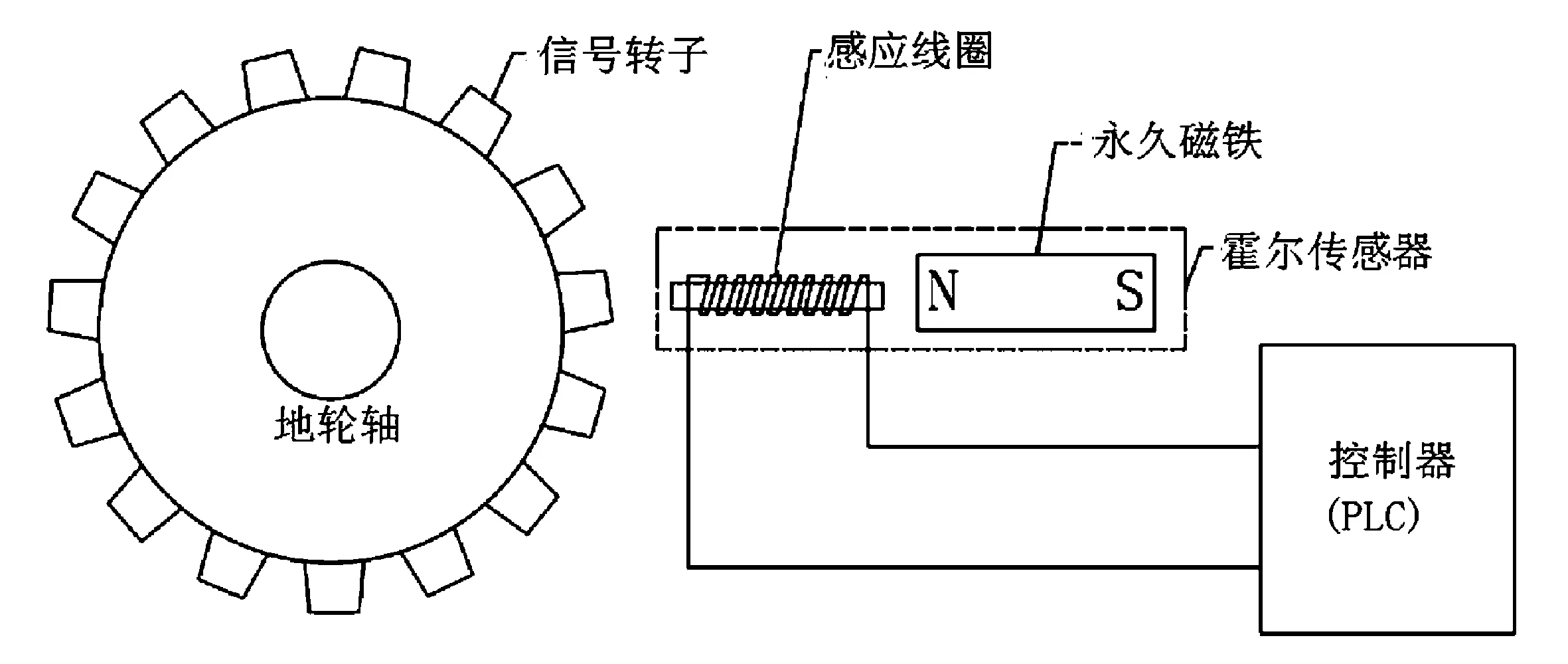
图5 地轮速度传感器原理图
2.5 种子面高度传感器
播种过程中,水稻直播机内由于播种种子箱内的种子在不断减少,种子面高度在不断降低,为了及时准确地检测出种子面的高度变化,从而掌握种子箱里的种子量,有必要对现有技术存在的缺陷进行改进。通过设置激光传感器对箱体内的稻种高度进行测量,当检测到的稻种的高度低于预设的阈值时,控制系统将控制报警器进行报警,及时提醒作业人员补充稻种。另外,设置电机驱动盖板进行转动,可以阻止稻种从出料口处流出,从而作业人员可实时控制播种量,不会出现返工的情况。
2.6 排种管检测传感器
为了计算排种管漏下的种子量,以及检测排种管堵塞情况,在每行排种管底部安装了红外光电计数器。本文采用红外遮光式计数器,其工作原理是从红外发光管发射出的红外光线直射在光电元件上,每当红外光线被遮挡一次,光电元件的工作状态就改变一次,通过放大器可使计数器记下被遮挡的次数[8],如有数值超出正常范围,PLC就会进行声光报警,从而实现精确播种。如果排种管堵塞,种子便向上堆积遮住传感器,这时传感器也会向PLC发送高电平信号,且信号一直为高电平,这样PLC就会根据预先的设置进行声光报警,避免漏播。
2.7 红外光电感应开关
红外光电感应开关是利用被检测物对光束的遮挡或反射,由同步回路选通电路,从而检测物体有无的。物体不限于金属,所有能反射光线的物体均可被检测。光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。本系统中将该开关安装在镇压轮的底部,接在控制系统电路中,只有当排种装置落下时,也就是镇压轮着地时,感应开关发信号给PLC,PLC控制步进电机带动排种器开始工作。同时,可以保证水稻直播机临时停车或地头转弯等状况时排种器不能继续转动,避免无效排种,浪费种子。
3 试验与结论
3.1 单体样机试验
为了测试该系统的性能,对单体样机进行了播种监测试验和数据采集。试验在水稻示范园区田间进行,试验稻种选择稻花香种子,作业速度设定在3 km/h,每穴播5~7粒破胸露白稻种,拖拉机牵引2BDXZ型10行水稻精量穴直播机,分别在在PLC控制和手动控制条件下进行不同株距地播种作业,最后选取10行排种器中的1行,对不同播种穴距条件下水稻的实测株距与设定株距值做对比,数据对比结果如表2所示。
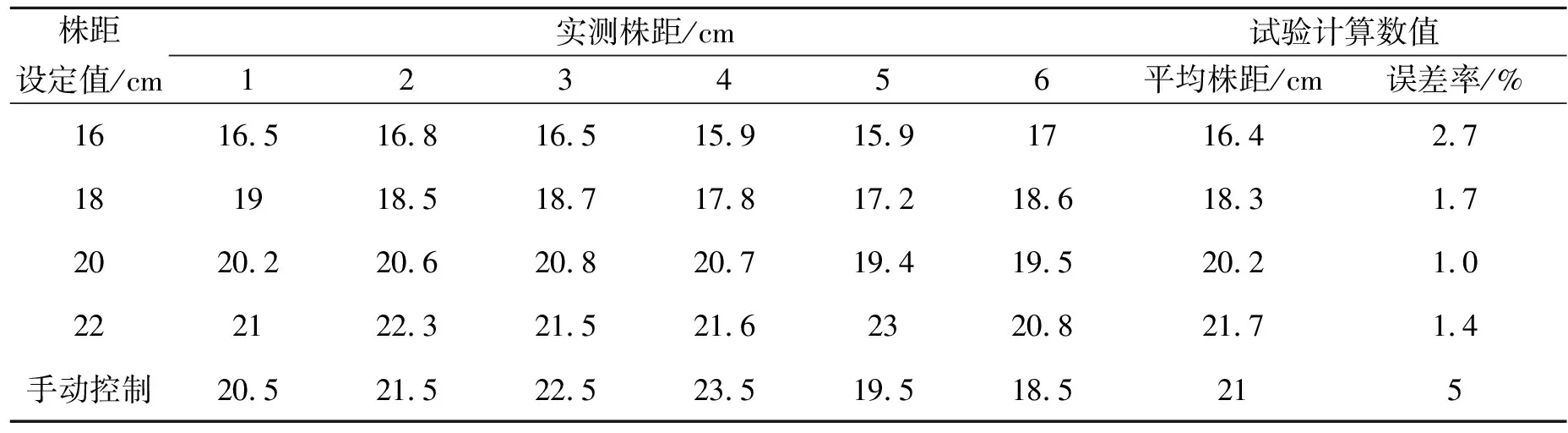
表2 播种机在不同控制状态下的播种株距
从表中可以看出PLC控制的播种株距与设定值之间的最大差异仅为1 cm,同时PLC控制的误差率低于手动控制,PLC控制表现出了较高的控制精度。控制系统对种子箱种子多少以及排种管堵塞都能及时准确地报警,避免出现空白的田块,为高产提供了保障。而手动控制状态下,播种株距虽然能被控制在20 cm左右,但是一致性较差,株距的变化范围达到3.5 cm,精确度比智能控制状态低。当然,控制系统依据拖拉机行进速度控制步进电机,所以系统不能减少拖拉机车轮滑移和排种器本身漏种引起的漏播现象。
3.2 性能对比试验
为了与其他水稻直播机对比该系统的性能,进行了性能对比试验。在同一台水稻精量穴直播(2BD-10型)机上,分别安装两套不同结构类型的水稻穴直播精量排种装置,一套为试验的精量穴直播机自带优化设计的型孔轮式排种器,另一套为自主研制的基于电机驱动的水稻直播机PLC控制系统,在同等工况条件下开展田间精量机械化穴直播的试验与对比,以比较两种不同类型穴直播系统的每穴入田播种量、排种干净度、种子破损率、漏播率、纯工作小时生产率和燃油消耗量。试验在水稻示范园区田间进行,试验稻种选择稻花香种子,作业速度设定在3 km/h,每穴播5~7粒破胸露白稻种。一方面观察入田的每穴播种量,另一方面在试验一定面积后拆解穴直播装置以观察排种器内是否留有种子,也即排种器的堵塞情况和排种干净度;同时,对种子破损率、漏播率、纯工作小时生产率和燃油消耗量进行了统计和计算。根据田间试验情况,试验效果如表3所示。
从表3可以看出,自主研制的基于电机驱动的水稻直播机PLC控制系统在每穴入田播种量、排种干净度、种子破损率和漏播率方面的性能,明显优于精量穴直播机自带优化设计的型孔轮式排种器;由于采用的是同一台水稻精量穴直播机做动力,所以纯工作小时生产率和燃油消耗量接近。
3.3 结论
基于电机驱动的水稻直播机智能化控制系统设计,结合该试验结果,可得到如下结论:
(1)该系统以PLC为控制中心,通过人机界面输入株距,根据传感器反馈回来的信号,支配步进电机完成规定的运动和功能,使电机驱动下的排种速度与拖拉机作业速度相适应,避免因为水稻直播机手动控制带来的播种株距不稳定等问题,实现排种器转速的PLC自动控制。且因为该系统由电机直接驱动排种器,减少了中间环节,简化了传动系统,提高了传动精度和稳定性,有效地保证了播种株距的一致性[9]。
(2)同时该智能控制系统能实时监测种子面高度、排种管漏播及堵塞情况,解决了传统直播机容易出现的漏播或堵塞等问题。而且本设计易于改进,并可与不同型号的播种机配套使用,增大了使用的范围。它的检测精度高,同时可检测多个信号,易于扩展,工作可靠。
(3)另外,该智能控制系统的排种器由步进电机驱动,减少了一般播种机采用地轮驱动带来的打滑及播种不均匀现象。
总之,本设计解决了无调速模块和播种检测装置的水稻精密排种器播种时遇到的一些无法解决的问题,不但减轻了播种人员的劳动强度,而且也提高了水稻直播机的播种质量,确保水稻增产增收,从而更好地帮助农民脱贫致富。
