基于深度学习的转辙机故障诊断方法研究
2023-04-06王一凡阿克选刘凯伟许玉超
王一凡,阿克选,刘凯伟,许玉超,韦 巍
(1.郑州地铁集团有限公司运营分公司,河南 郑州 450000;2.广西大学 计算机与电子信息学院,广西 南宁 530004)
ZDJ9型转辙机是国内自主研制的电动转辙机,广泛应用于城市轨道交通中的道岔转换过程,一旦发生故障将严重影响轨道交通的安全运营。目前,运营部门大多采取故障维修和定期维护相结合的方法对其进行设备健康管理,通过微机监控设备调阅道岔功率、电流曲线和夜间巡检记录转辙机拉力参数,人工目测判别设备当前的运行状况,造成作业无针对性、工作任务量大、故障诊断效率较低等问题,为节约维修成本和减少作业时间,传统维修方式逐步向实时状态维修过度[1]。
转辙机故障诊断的研究逐步从便携式测试仪到在线实时检测发展,通常包括信号采集、特征提取、特征选择和故障分类4个步骤[2],将传感器系统采集的状态信号,以专业的先验知识进行特征提取,如使用灰色关联[3]、隐马尔可夫模型[4]和支持向量机[5]等算法作为故障诊断的识别分类器,训练机器学习模型进行设备故障诊断。传统故障诊断方法在信号处理分析时相对复杂,准确性大多取决于提取故障特征的表征度,割裂了特征提取与故障分类的联系,缺乏实用性和通用性[6]。
随着大数据与人工智能的发展,在故障诊断领域打开了传统算法在实际应用中的瓶颈[7]。孙迪钢[8]将转辙机功率曲线数据绘制成曲线图像送入CNN模型进行故障识别,分类精度达到99%,但训练时间较长;杨菊花[9]等人运用小波变换将转辙机功率、电流曲线组合成矩阵送入CNN-GRU模型完成故障诊断,准确率达95%,但在处理过程中易造成信息丢失,从而影响精度;孙孟雷[10]通过提取功率信号形状特征,转化成灰度图像矩阵作为CNN模型的输入,正确率达99%,但数据量高,造成计算量增大;池毅[11]等人将功率曲线原始数据直接送入1DCNN模型进行故障诊断,准确率达99%,但在训练过程中容易出现过拟合的问题。
以上研究大多基于微机系统监测的功率曲线,不能直观判断转辙机拉力的受力大小与方向,而转辙机牵引力表现受力情况和机械性能,反映道岔转换过程的受阻情况,因此,本文选择直观反映道岔实时工作状态的拉力信号进行研究。
1 ZDJ9转辙机工作原理及故障分析
ZDJ9转辙机通过连接杆和连接销与道岔相连,提供动力操纵道岔,形成转辙机解锁、动作、锁闭3个阶段[12]。动作过程中各阶段故障表现的差异性较大,与转换力大小变化有着相互对应的关系,就牵引力监测方面,可通过销式无线传感器进行实时获取,本文实验使用的采集设备来自某城市轨道交通公司下属转辙机智能实验室,采集过程如图1 所示。

(a)转辙机试验台测试情况
1.1 正常拉力曲线分析
ZDJ9转辙机正常工作的牵引力曲线如图2 所示,在解锁区拉力呈上升趋势,出现最大值,在动作区平稳拉动尖轨,曲线数值稳定无突变,尖轨密贴锁闭时,拉力值回弹后逐渐下降,以此完成单方向道岔动作过程,再次操作转辙机拉回道岔的曲线与此前成对称关系,动作曲线趋势特征随不同环境和参数设置而发生变化,细节处肉眼难以看出,因此通过人工判别转辙机工作状态的效率较低。

(a)正反操作时拉力曲线
1.2 故障拉力曲线分析
转辙机故障分为电气故障和机械故障,而90%以上属于机械故障,主要表现为动作阶段和时间异常、牵引力异常突起等,本文主要对6种典型故障现象进行总结,见表1 所示。

表1 ZDJ9转辙机不同拉力故障总结
2 基于1DCNN-LSTM故障诊断方法
2.1 一维卷积神经网络基本原理
卷积神经网络主要由卷积层、激活函数、池化层、全连接层组成,卷积层主要作用是提取数据的局部特征,激活函数的主要作用是将卷积层处理过的数据进行非线性的映射,增强整个网络的表达能力,池化层的作用是将特征的尺度进行缩减,最后由全连接层将提取到的特征进行连接以完成分类[13]。
古代建筑多为亭台楼阁,这就为士人们提供了很好的“凭栏”场所。登高望远向来为士人所推崇。登上楼阁,由于四面镂空,作者可以远眺,登高望远就能感受自身的渺小与天地的广大,情感也就随之而来。建筑的形态为“凭栏”意向提供了客观的条件,而建筑的精美又为士人提供了审美的情趣。由此产生了“登高必赋”的思想感情。这其实是之前“登山临水”的继承与发展。士人本身对于现实的不满,却又无处发泄,所以他们在很多时候都需要一种心灵的寄托,而周围建筑中最能满足士人,又不需要花费时间去远离市区登山临水,登楼便自然而言成了满足他们心理需要的场所。
1DCNN模型的训练过程分为前向传播和反向传播两个过程,前向传播的公式为

(1)

(2)

反向传播过程根据模型输出以及序列标签构建损失函数,并以最小化损失函数为目标计算其梯度通过反向传播算法逐层反馈,借助梯度下降算法更新每层网络的参数。常用损失函数为均方误差函数,公式为

(3)

反向传播的目的是找到使损失函数最小的网络参数配置,以最小化损失函数为目标,使用链式求导法则更新偏置和权重,使模型尽量拟合训练数据,公式为

(4)
模型通过前向和反向传播这两个环节,迭代参数和优化损失函数直到训练结束,其实质是构建多个能够提取输入数据特征的滤波器,通过这些滤波器对输入数据进行逐层滤波及池化,逐级提取隐藏在数据之中的拓扑结构特征。
2.2 长短期记忆网络基本原理
长短期记忆网络是循环神经网络架构的变体,能够保存信息防止较早期的信号在处理过程中逐渐消失,若将神经元传播过程比做一条传送带,其运行方向平行于待处理的序列,其中的信息可以在任意位置跳上传送带,然后被传送到更晚的时间步,并在需要时原封不动地回归[14],公式为
ft=σ(Wf×[ht-1,xt]+bf),
(5)
it=σ(Wi×[ht-1,xt]+bi),
(6)
ot=σ(Wo×[ht-1,xt]+bo),
(7)
at=tanh(Wa×[ht-1,xt]+ba),
(8)
ct=gfct-1+itat,
(9)
ht=ottanh(ct),
(10)
式中:σ表示sigmoid激活函数;ft,it,ot分别表示遗忘门、输入门和输出门;ht表示隐藏状态;at表示候选单元;ct表示记忆单元,使得LSTM单元有保存、读取、重置和更新长距离历史信息的能力。
2.3 1DCNN-LSTM网络模型
本文提出一种基于1DCNN-LSTM的故障诊断算法,使模型以端到端的方式传递,能够快速并准确地对转辙机拉力故障进行诊断,诊断流程如图3 所示,具体步骤为:
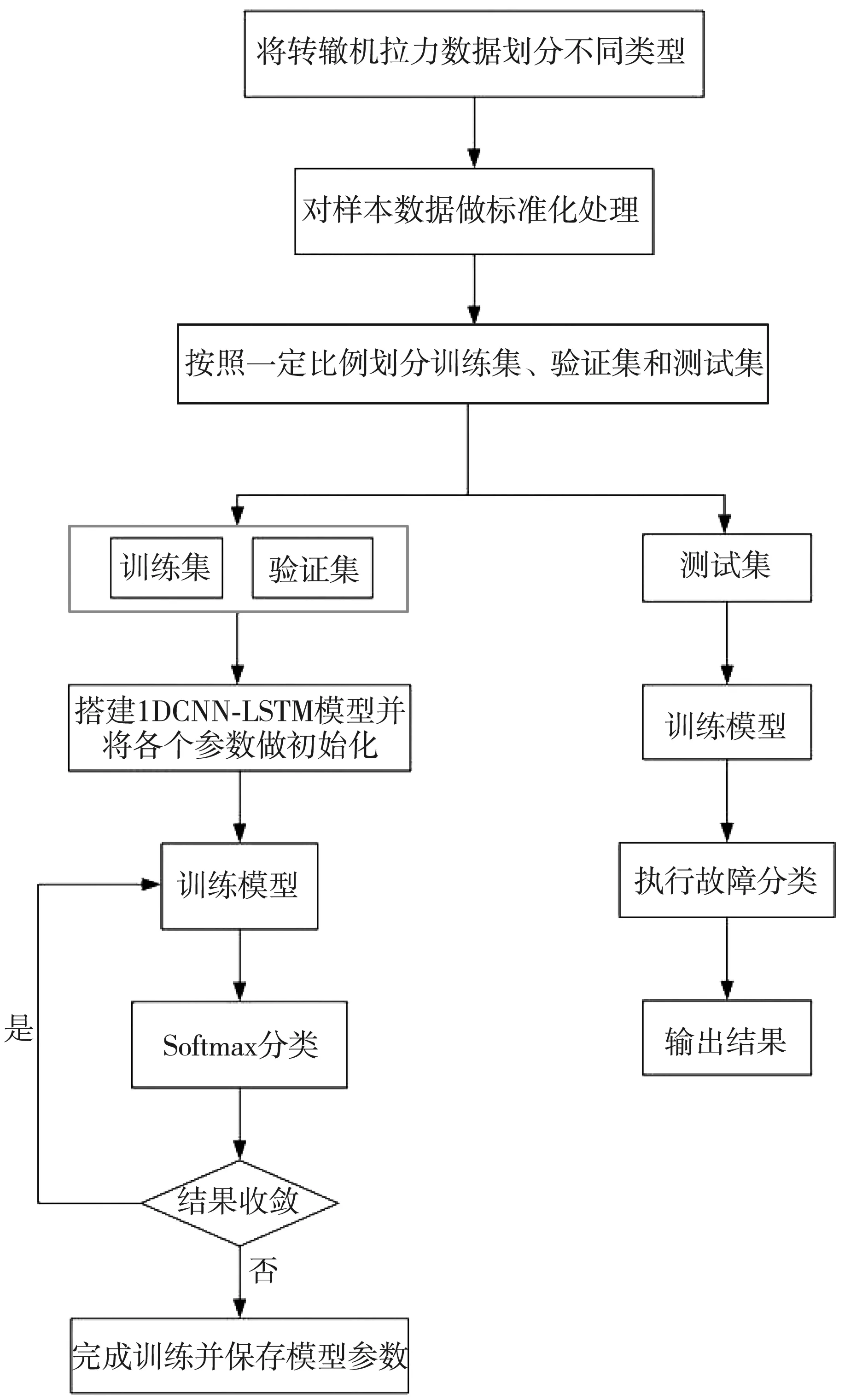
图3 1DCNN-LSTN模型故障诊断整体流程
2)将数据集划分为训练集、验证集和测试集;
3)设置1DCNN-LSTM模型的初始参数;
4)使用训练集训练模型,通过执行前向传播和反向传播来调整参数,直至验证集的准确率达到满意,可保存此时的模型参数;反之,继续进行参数调整;
5)使用测试集验证训练好的模型,评估模型的故障诊断能力。
借助转辙机智能测试台,解决故障数据相比于正常数据较少的矛盾。在拉力数据采集过程中,传感器在转辙机动作时间内捕获点数约为160个,对长度不同的数据进行补零处理,满足输入格式一致的要求。通过现场测量和仿真拟合获取6类故障状态数据,与正常状态数据分别添加标签0~6,每种类型均采集至300组数据,然后将数据集划分为训练集、验证集和测试集,比例为6∶2∶2,保持数据分布的一致性。
为进一步确定模型参数,验证不同大小和数量的卷积核以及其他参数的变化对于该诊断模型的影响,以包含一层卷积层的基础模型为框架,在其他条件不变的情况下,通过改变尺寸分析参数变化对模型诊断性能的影响,不同超参数性能比较见表2 所示。

表2 不同超参数性能比较
通过适当增加卷积核的数量和大小,可以更好地捕获序列特征,提高准确率,但过度增加卷积核的尺寸和堆叠卷积层的数量,不仅使得运算复杂化,还会使准确率降低,通过比较得到1DCNN-LSTM模型结构和参数,分别如图4 和表3 所示。
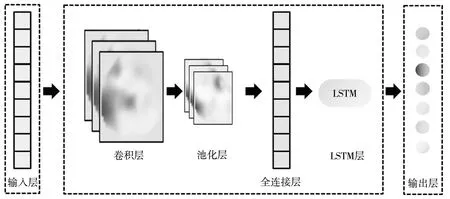
图4 1DCNN-LSTM模型结构

表3 1DCNN-LSTM模型参数
3 实验结果和分析
实验算法编程由Python3.7实现,运用Anaconda工具包中的Jupyter Notebook实现实验结果分析和数据分析可视化,算法框架为Keras深度学习,加入Adam优化器,学习率设置为0.001。图5 为该模型对应的混淆矩阵,图中数字为模型对测试样本的识别率,表明运用该模型对故障分类诊断具有较高的准确率和稳定性。

图5 诊断结果混淆矩阵
准确率和损失函数曲线如图6 所示,在训练过程中,损失函数值不断下降,证明它正趋于收敛,准确率的值不断增加,通过实验结果可以看出,随着迭代次数的增加,在迭代6轮之后,模型准确率已经稳定,达到100%,并且在后续训练中保持稳定,具有快速的收敛速度,测试过程中,在经过8次迭代后,没有出现波动区间,准确率和损失函数曲线较为平滑稳定。
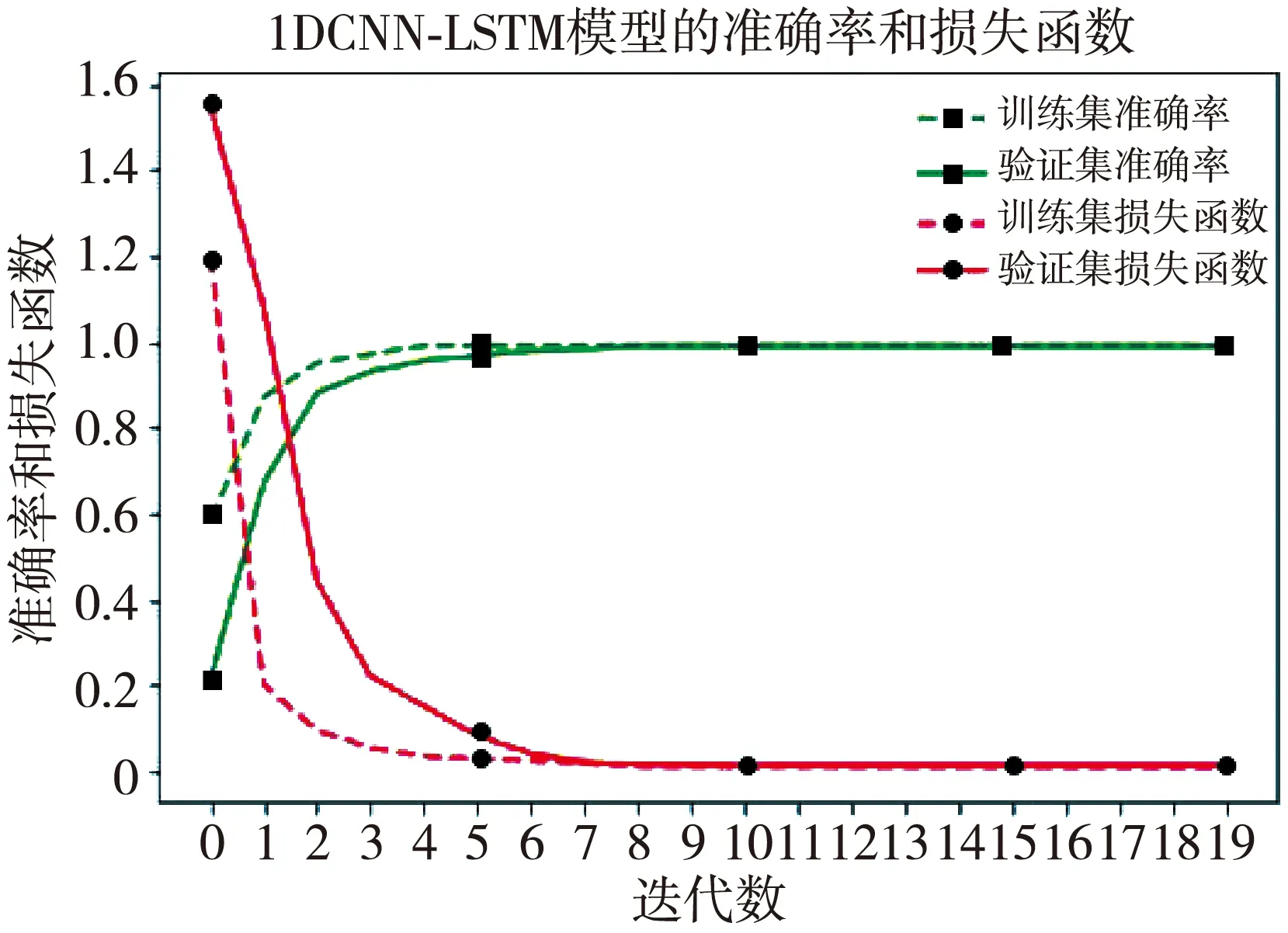
图6 1DCNN-LSTM网络模型准确率和损失函数曲线图
使用t分布随机邻域嵌入(T-SNE)技术,对分类效果进行可视化处理,如图7 所示,在最后一个卷积层的输出中,故障样本之间的距离比较近,而后加入LSTM层后分类结果变得更为清晰,结果表明,卷积层对序列特征提取能力强,在故障分类方面存在局限性,采用LSTM算法可以提高故障分类能力。

图7 T-SNE可视化
将实验模型分别与表4 中不同模型进行训练测试对比,结果表明,1DCNN-LSTM模型不仅可以用来故障诊断,而且诊断准确率较其他模型较高。
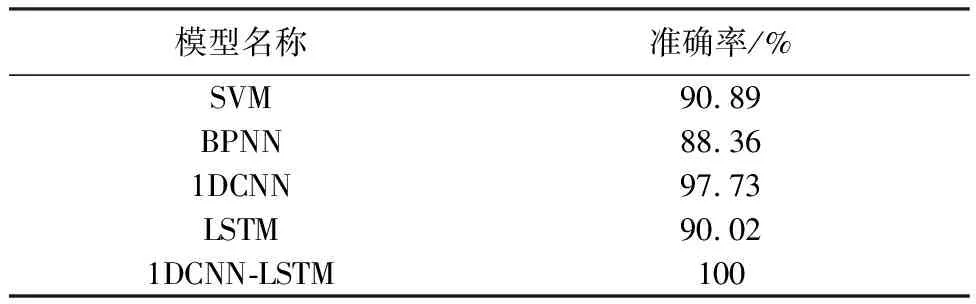
表4 不同模型准确率比较
4 结 论
本文将1DCNN-LSTM模型应用于ZDJ9转辙机拉力故障诊断,根据实验结果可以得到以下结论:
1)1DCNN作为神经网络模型可以学习数据在整体结构上的特征,并进行特征提取,避免人工特征提取造成的主观因素影响,通过加入LSTM层提取时序特征,完成目标信号的特征提取和分类,实现端到端的故障诊断。
2)1DCNN-LSTM模型能够自适应学习故障特征,挖掘传感器采集信号的原始有效信息,通过对比不同模型,运用本模型的测试集准确率较高,并具有较快的收敛性和稳定性。
3)1DCNN-LSTM模型计算复杂度较低,为转辙机故障分析和状态检修提供轻量级模型,满足现场快速分析的需要,改变传统依靠技术经验的检测方式,保障检修的及时性。
4)选用拉力信号可以直观、准确地反映设备运行状态,及时发现工况变化对道岔转换的影响,使得转换力稳定保持在合理区间,实现检修和运维的智能化。
