基于驱动转矩调整的电动汽车电子差速器设计
2023-04-01李全民
李全民
广州理工学院智能制造与电气工程学院,广东广州 510540
0 引言
分布式轮毂电机驱动电动汽车的左右驱动轮没有像传统燃油汽车那样的机械约束,可以单独控制,因而可以使用电子差速器取代传统的机械差速器。目前,电子差速器的控制策略大致分为转速控制和转矩控制两类。转速控制电子差速器的本质是对相互独立的两侧驱动轮设计了一个转速约束(一般依据Ackerman模型来设计),如n1=g(n2)。如果施加的转速约束与道路对左右驱动轮的转速约束n1=f(n2)不能很好地吻合,就会产生转向不稳和车轮滑移等不良现象。而实际上,道路约束复杂多变,很难得到其精确模型,两者约束很难精确匹配,尤其是汽车高速行驶时这种缺陷表现得更为明显[1]。
实际上,作为汽车传动系关键部分之一的差速器既要传递转速又要传递转矩。传统机械差速器是平均分配转矩,当汽车转向行驶时,载荷转移导致外侧车轮所承受的载荷大于内侧车轮,在附着系数相同的情况下,地面对外侧车轮所能提供的驱动力要大于内侧车轮。同时根据汽车理论[2],驱动轮的驱动力等于电机提供的驱动力减去滚动阻力,而汽车转向时的载荷转移使外侧车轮的滚动阻力要大于内侧车轮,若此时驱动转矩是平均分配,那么内侧车轮的驱动力将大于外侧车轮。综合以上两个方面的原因,在其他因素不变的情况下,平均分配转矩使地面对外侧驱动轮提供的较高附着力没有得到有效利用,而内侧驱动力超过了地面提供的附着力,引起内侧车轮滑移率偏高而外侧车轮偏低,从而使汽车行驶稳定性变差,轮胎更容易磨损。本文就以驱动能滑移率为控制目标、以驱动转矩为控制输入,设计一款电子差速器,确保两侧驱动轮滑移率一致并达到最佳,使汽车处于理想的行驶状态。
1 动力学模型的建立
汽车转向时主要涉及侧向平移和横摆角速度ωr两个自由度,加上4个车轮的转速,在汽车理论二自由度动力学模型的基础上[2],建立某一前轮转向后轮驱动的电动汽车六自由度模型。
汽车二自由度转向模型如图1所示。图中:a为整车质心距前轴的距离;b为整车质心距后轴的距离;L为汽车轴距,L=a+b;B为汽车轮距;Fxi(i=1~4)为地面对各轮的切向反作用力;Fyi(i=1~4)分别为地面对各轮的侧向反作用力;ωr为整车横摆角速度;β为整车质心侧偏角;v为整车质心速度;u、υ分别为v在x、y轴上的分量;δi(i=1~4)为四轮的转向角;αi(i=1~4)为四轮侧偏角;ηi(i=1~4)为四轮的轨迹角。

图1 汽车二自由度转向模型
y轴方向的受力方程为:
(1)
整车绕质心旋转方程为:
(2)
式中:m为整车质量;Jz为整车绕z轴的转动惯量;δi为车轮转角,δ1=δ2=δf,δ3=δ4=0;Ji为单个车轮的转动惯量;ωi为各轮转速。
电动轮受力分析如图2所示[2]。主动轮和从动轮的主要区别为:①主动轮受驱动转矩而从动轮没有;②两者受地面的切向力相反。如果把地面法向反作用力的偏移距a用滚动阻力系数f表示,对轮心取矩可得统一方程为:
(3)
式中:Ti为各轮的驱动转矩,T1=T2=0;R为轮胎滚动半径;Fzi为各轮受到的法向反作用力;i=1~4。

图2 电动轮受力分析
各轮受到的法向反作用力为:
(4)

各车轮中心速度为:
(5)
各轮偏转角为:
(6)

各轮滑移率为:
(7)
2 电子差速器设计
如前所述,汽车转弯时的离心力使载荷在内外侧车轮之间转移,从而导致内外侧车轮滑移率的不平衡,而离心力的大小主要是由方向盘转角和车速决定,因此选择方向盘转角δf、整车车速u为电子差速器的输入。另外,路面状况也是很重要的因素,它决定了车轮的最佳滑移率,因此也是输入。电子差速器的输出就是调整以后的内外驱动轮的驱动力矩,调整的总原则为减少转向内轮的驱动力矩、增加转向外轮的驱动力矩,以便使内轮的滑移率减少、外轮的滑移率增加。电子差速器以驱动轮的滑移率为反馈项,确保它始终为最佳滑移率,达到汽车转向迅速平稳、充分利用驱动力和减少轮胎磨损的最终目标。
电子差速器控制系统如图3所示。

图3 电子差速器控制系统
电子差速器控制系统主要分为两大部分。

第二部分为驱动转矩调整。一般车用电机控制器输入为需求转矩,因此电子油门与输入电机控制器的转矩是一一对应的,要对两侧电机输出转矩进行协调分配,只需根据已经计算出的调整系数按照式(8)和式(9)对两侧电机的电子油门进行分配即可。
(8)
(9)

3 仿真分析
根据前面介绍的电动汽车动力学方程和电子差速器控制原理,采用MATLAB/Simulink进行仿真,主要仿真参数见表1,其仿真模型如图4所示。

表1 主要仿真参数

图4 基于MATLAB/Simulink的仿真模型
假设在理想转弯条件下,x方向的速度u恒等于5 m/s,踏板对应初始转矩T=1 200 N·m时,汽车左转弯2°,采用前面设计的电子差速器进行模拟仿真,结果如图5至图7所示。同时,为了比较分析,图中也给出了同样条件下以驱动转矩平均分配为主要特征的传统机械差速器的仿真结果。
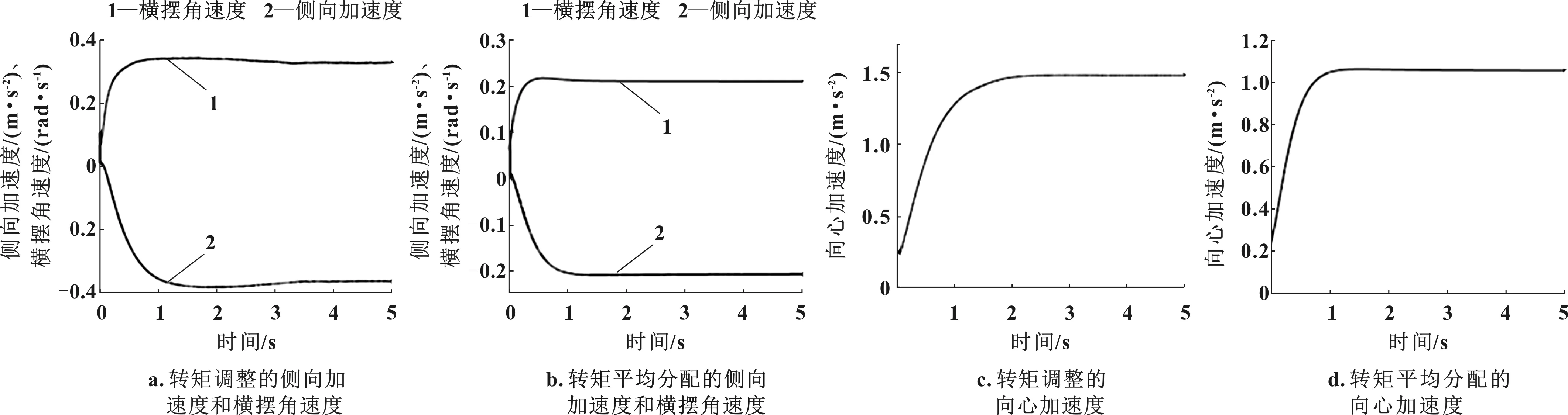
图5 电动汽车转弯时侧向加速度、横摆角速度以及向心加速度比较

图6 电动汽车转弯时瞬时转弯半径、驱动轮纵向速度及整车质心侧偏角比较
由图5可以看到,电动汽车在转弯时的侧向加速度、横摆角速度和向心加速度方面,以转矩调整为主要特征的电子差速器比转矩平均分配的传统机械差速器都要大。由图6可以看到,与转矩平均分配的传统机械差速器相比,转矩调整的电子差速器的转弯半径要小,转弯时内外驱动轮转速差大,整车质心侧偏角也大。由此说明,新设计的电子差速器比传统的机械差速器有更好的通过性、操作性和控制性。由图7可以看到,通过设定最佳的路面滑移率,转矩调整的电子差速器的附着系数明显高于转矩平均分配的传统机械差速器,说明转矩调整的电子差速器能很好地利用路面提供的摩擦力,并且速度更高。
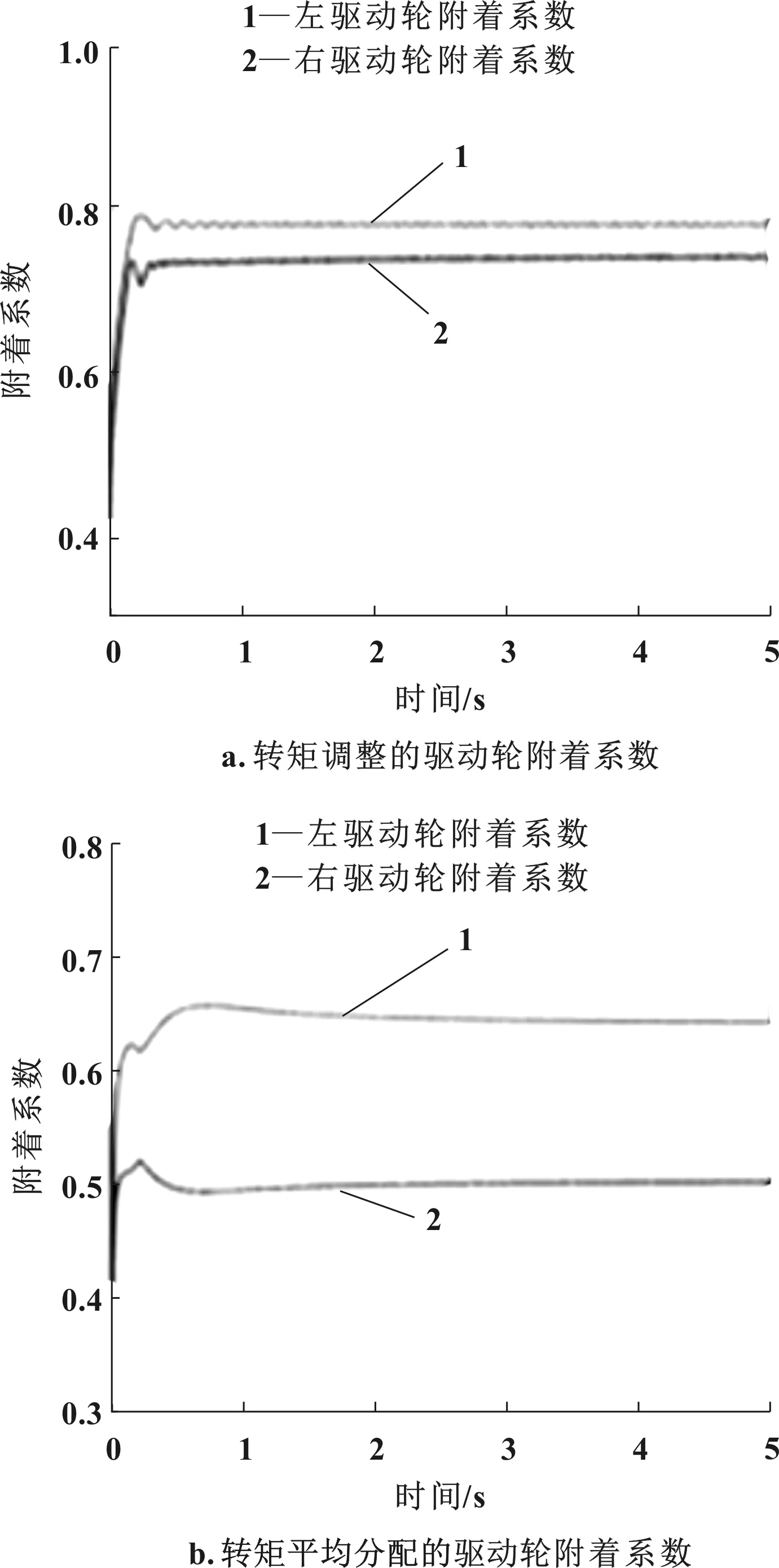
图7 电动汽车转弯时附着系数比较
4 结论
经过对MATLAB/Simulink模拟仿真结果的对比分析,可以得出以下两点结论:
(1)基于转矩调整的电子差速器在通过性、操作性和控制性方面明显优于传统的转矩平均分配差速器;
(2)与传统机械差速器相比,基于转矩调整的电子差速器能有效提高地面附着系数,更好地利用路面摩擦力,动力性好。
