感性负载下高精度电流源研究
2023-04-01张智勇卢亦桐韩静怡任晓琨
张智勇,卢亦桐,韩静怡,任晓琨
(中国航空工业集团公司 西安航空计算技术研究所,陕西西安,710076)
0 引言
航空机载设备之间需要传输各种信号,信号传输方式除了常规的直流电压传输之外,电流信号由于具有其较简单的结构,较强的干扰抑制能力,较强的远距离传输能力以及安全可靠的优势,运用也十分广泛。电流信号通常由精密的电流源电路产生,设计精密的电流源是电流信号稳定可靠传输的重要基础。目前,大部分电流源的输出均由输入电压直接控制,输出电流大小与输入电压基本呈线性关系,输入电压经V-I转换电路输出电流。因为输入电压产生的电路拓扑多种多样,以及V-I转换电路拓扑也各不相同,所以电流源在输出范围和输出精度方面有各自特点[1]。
文献[4]对Howland电流源进行了研究,原本的Howland电流源电路输出受负载干扰较大,分辨率、控制精度和稳定性都不高。该文献针对这些问题,以DSP为控制核心,将Howland电流源电路进行了改进,DSP控制12位DAC产生电压基准作为压控电流源的输入。同时,设计电流反馈,实时采样和比较,对电路进行精确的控制和补偿。测试结果表明,改进的Howland电流源电路安全性和准确性均得到了提升,负载的影响显著降低,稳定性,精度和分辨率都有一定提升,满足力矩电机等高精度高安全性要求的应用需求[4]。
文献[5]提出了一种高精度宽范围的数控电流源模块,该电流源模块包含一种由运算放大器和P沟道MOS管组成的压控电流输出电路。在该设计中,输出电流精度高,范围宽,同时高度集成的运算放大器使电路具有小型化优点[5]。
文献[6]提出了一种支持正负20mA范围内输出的高精度电流源电路,其V-I转换核心由两个相同的仪表放大器组成,输出精度可达千分之一,并同时检测电流的反馈值上报CPU[3]。当电流源驱动阻性负载或者容性负载时,输出电流稳定性较好。然而,在感性负载下,输出电流变化时,电路的稳定性以及快速性均会受到一定程度的考验[7],该文献没有考虑感性负载对电路输出的影响。本文在文献[6]的基础上进行感性负载下高精度电流源的稳定性和快速性研究。
1 电路基本原理
文献[6]提出的电路核心包括级联的仪表放大器以及推挽电路,如图1所示,仪表放大器U1的输出控制推挽电路的基极电压,仪表放大器U2提供误差校正,误差电压送至U1的基准脚,并与输入电压Uref相加,结果得到一个与输入电压Uref成正比的输出电流IOUT,即使在90mA输出时也可以保持高精度。

图1 核心电路原理图
仪表放大器虽然是由运算放大器发展而来的,但比运算放大器性能更好,是一个更加精确的差分电压放大器[8]。因为在仪表放大器的里面还整合了关键电极块,所以它具备高共模控制比、高输入工作电流、低噪音、低线性误差、低损失漂移增益等设计灵活和应用简便的特性,应用于高速的控制、数据采集以及传感器信号的放大等技术,在医疗仪器,航空航天,高档音响设备等领域倍受青睐。另外,仪表放大器差分输出,单端输入,自身是一个小闭环系统。通常,计算放大器的闭环增益是根据反相输入端和输入输出端间所连接的外界电流确定,但在仪表放大器内有反馈电阻网,由反馈网络和输入端口相互隔离,增益范围可由内部电流预置,也可由设计师设计的外界增益电阻选择。
仪表放大器的基本结构是两级差分放大电路[9],如图2所示。其中,运放O1,O2的方式均为同相差分信号,由于采取了同相信号的方法,进入信号电压较高,因而集成电路中对微弱输入信息的减弱作用较小;通过差分输入的方法,共模信号被扩大,而差模信息加大,使输入输出形成了最大的差模信息和共模信号之间的幅值比(即共模控制比CMRR)。就如此,在带有运放O3的输出级差和分放大系统中,在相同共模控制比的情况下,电阻R3和R4,以及射频电阻和R5的精度匹配条件大大降低。因而,仪表放大电路就比普通的差分放大电路具备了较好的共模控制功能。

图2 仪表放大器典型结构
仪表放大器的作用是对电路进行控制和误差校正,但不是输出电路的一部分。因此,三极管Q1和Q2可以替换为更大功率的三极管,以实现更高的电流输出。
此外,还可将仪表放大器的增益设置至1~10000左右的任意增益,不同增益适用于不同的输入电压信号。一般来说,通常,在仪表放大回路的RG端通过简单的跨接电阻,就能够达到所需要的增益。
图1所示电路图中,推挽电路由两个三极管组成,这两个三极管的基级连接到一起,其中NPN三极管上拉到+15V,PNP三极管下拉到-15V。不同输入电压,推挽电路接通不同的三极管,三极管导通后通过输出电阻将电压转换为电流。不同的输入电压结合不同的输出电阻,最终的电流输出值通过这种方式被控制在一定范围内,同时,由于三极管的最大过流属性,外部负载的大小是有限制的。
下面对图1所示电路原理具体分析:
电阻RG1和RG2用于配置U1、U2的放大倍数,假定将两个仪表放大器的放大倍数分别配置为A1,A2,则:
文献[3]中,配置A1=A2=1,因此:
2 感性负载下仿真分析
令该电流源电路驱动感性负载Rload和Lload,在Saber中搭建仿真模型,进行仿真分析。
首先对仪表放大器进行选型。AD620也是一种兼顾成本与精确度的专用放大器,通过设定一个外部电流来调整增益范围,增益范围可设定在1~10000。AD620由传统的三运放架构扩展而来,但由于其供电设计较一般的三运放架构更大,且设计容量也更小,因此耗电量较小(不超过1.3mA),更适合于低电压低功耗的使用环境。
AD620的单片设计和激光晶体控制,使得集成电路器件密切地配合与追踪,并保持了集成电路内在的高性能。AD620采用三运放组合的仪表放大单元,可保证增益调节的精确,其进口端的三极管供给单一的差分或双极输入,同时采用β技术可以得到较小的进口偏置电压,并且利用输入级的OP放大器的反馈,从而维持了进口三极管的集电极流量不变,同时可以将输入电流加在外部增益的输入电流RG上。
另外,AD620也具有良好的通讯功能,非常适合在多路复用的场合中[10]。在增益为100时,AD620的信号带宽仍能达到120 kHz。因此,文中选用了高性价比的仪表放大器AD620。本文将外部电阻RG1、RG2均设置为开路,配置两个仪表放大器AD620的增益为1。
本文拟对-20~20mA 电流输出的电流源电路进行分析,选取推挽电路中的三极管Q1、Q2时,需考虑通过电流的能力,并有一定余量。
电路参数选择如表1所示。

表1 电路参数选择
2.1 稳定性分析
绘制出该电路Bode图,从图3中可以看出在10Ω,1mH的负载下,系统幅值裕度约为14dB,相角裕度约为10°,系统是稳定的。
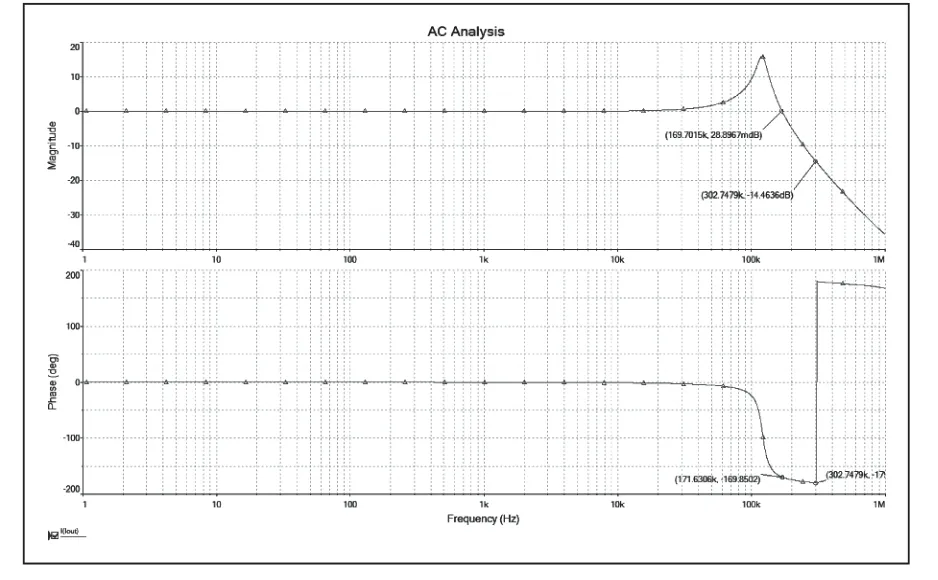
图3 Bode图
2.2 阶跃响应分析
给定Uref在1ms时由0变为5V(对应输出应从0mA变为20mA),仿真步长为1μs,仿真时长2ms,系统的阶跃响应如图4所示。从图中可以看出,系统输出有较大超调(5.27mA),且系统在经过100μs后重回稳定20mA。
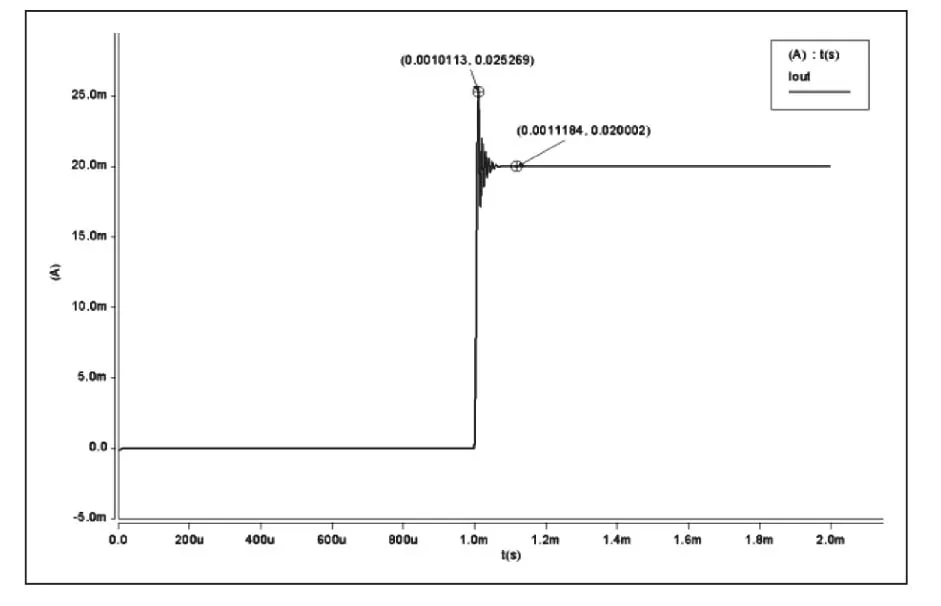
图4 阶跃响应
通过对该电路在感性负载下的稳定性分析可以看出,该电路稳定性较好;通过对该电路的阶跃响应分析可以看出,该电路有较大的超调,输出电流设定为20mA的条件下,超调超过了5mA,即25%,超调是衡量调节品质的一个量,超调反映的是控制系统在达到稳态前控制作用最差的结果。因此,需要采取措施对电路进行优化校正。
3 校正措施研究
在输出端并联校正电阻RB与校正电容CB,如图5所示,在不改变电路原稳定性的条件下,调节参数以期获得更强的快速性,消除超调。

图5 电路校正措施
经过参数整定,当校正电阻RB为100Ω,校正电容CB为1μF时,系统消除了超调,同时拥有良好的快速性,90μs达到了稳态,如图6所示,Iout-1表示校正之前的输出电流波形,Iout-2表示校正后的输出电流波形。

图6 校正前后阶跃响应对比
4 结语
本文分析了一种支持-20~20mA 电流输出的高精度电流源的工作原理,结合Saber仿真软件,根据该系统具有较强的稳定性但是阶跃响应超调过大的结果,提出一种校正方案。仿真结果表明,校正方案可以消除超调,增强了此高精度电流源的实用性。
