配电线路覆冰清除方法的研究与应用
2023-03-27徐子涛宋翰彪
徐子涛 ,宋翰彪
(1.云南电网有限责任公司昭通大关供电局,云南 昭通 657000;2.武汉欣泰宇电力电子科技有限公司,湖北 武汉 430074)
配电网架空线路覆冰现象是影响电网安全运行的一个重要因素,目前架空线路覆冰处理主要利用机械敲打、刮铲等方式来完成,通过外力直接击碎覆冰使其剥离,由于这些架空线路高度较高且带电,一般设备难以企及,大部分须要通过人工或者除冰机器人来操作,但覆冰后导线表面光滑,难以为除冰机器人提供足够稳定行进的摩擦力,除冰机器人常用的轮式行走机构难以保证设备稳定运行,目前绝大多数依然采用人工操作除冰,其工作量大,危险性高,除冰效率较低。配电网因其特殊性,特别是带绝缘层的线路,不适合直流融冰技术的应用,人工敲打覆冰,力度掌握不好,容易导致绝缘皮破损。目前国内外除冰方法繁多,其除冰原理分为3 种:自然除冰、热力融冰、机械除冰。自然除冰在覆冰严重时,往往须要停电,具有较强的偶然性和不确定性,热力融冰须要消耗大量能源,造成电能损耗,现有的机械除冰大多依靠人工使用绝缘操作杆、绝缘滑铲等工具敲打除冰,费时费力且危险性大。
昭通位于云南省的东北部,与四川盆地接壤,受四川盆地气候的影响,相对于全省冬季气温低,在0 ℃左右,降雪较多,极易产生雪融化后转为冰冻。冰雪灾害对昭通电网构成了严重威胁。2008 年1 月,南方电网遭受大面积的冰雪灾害,一度造成孤网运行,大大降低了运行可靠性,给南方四省造成了一定的经济损失。昭通供电局对线路抗冰害工作的重视程度非常高。然而,配电网属于电网最薄弱的环节,直接关系到用户的供电可靠性,因此,研究配电线路覆冰清除方法非常有必要,也是符合南方电网公司抗冰防冰工作的发展方向。
1 总体设计
除冰机器人是一个机电一体化的系统,运用不同领域技术,各个部分能够协调工作。配电线路除冰机器人整体机构有2 部分组成:整体驱动单元(含电池及外壳)+前部除冰单元+爬升上线装置。整体驱动单元:4 颗驱动马达及驱动轮;电池组件;(选用步进马达,实现速度均匀可控)前部除冰单元:往复式冲击锤;底部旋转除冰八爪盘;上线爬升装置:绝缘挂钩+绞盘。除冰机器人总体结构设计如图1 所示。
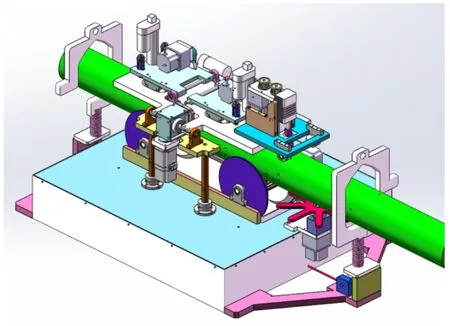
图1 除冰机器人总体结构设计图
1.1 整体结构介绍
除冰机器人是一个机电一体化系统,整体由仿生学根据蛇行原理设计,机械整体机构如图2 所示。

图2 机械整体机构图
机器人整体结构:敲击除冰模组、前部旋转八爪盘除冰装置、底部驱动轮、爬升上线模组、上部驱动模组翻转驱动马达组件、上部驱动轮组成。
敲击除冰模组,主要由步进马达驱动曲线锯转接头组成,实现往复式敲击除冰;前部旋转八爪盘除冰装置,由步进马达驱动;底部驱动轮,由2 组马达通过联轴器直驱主动轮前进/后退;爬升上线模组,由前后两个绝缘挂钩+升降绞盘组成;上部驱动模组翻转驱动马达组件,由步进马达+蜗轮蜗杆减速机组成(优选减速比1/60);上部驱动轮,由步进马达通过同步带轮转动实现上部主动轮的前进/后退。
1.2 机器人在冰导线上平稳行走方法
在覆冰条件下,线上的摩擦力很小,给线上机器人行走带来困难,尤其是上坡段,更为困难。研究行走机构克服冰导线表面摩擦力小的问题,是该项目的重点。本项目采用上下双轮联动行走,牵引与从动配合,保证机器人沿直线方向行走。调整好行走轮的位置,控制机器人的重心。从动轮采用可调高低设计,以满足不同线径和冰层厚度不同的需要。同时研究前后牵引轮之间差速的问题,采用电子差速控制,保证机器人行走时不卡顿。
1.3 机器人上线方法
在机器人的前后端各设置一台电机,遥控操作。安装时,使用无人机将蚕丝绳带起,起飞越过导线高度后,将蚕丝绳抛下,蚕丝绳跨在导线上。导线一端固定在机器人本体上,另一端与电机绞盘连接,利用绞盘将蚕丝绳卷起,将机器人吊起来,机器人贴紧导线后,利用遥控,将机器人锁在导线上。
1.4 机器人行走中除冰方法
结合昭通电网研究机器人去除导线冰柱方法,采用星状旋转盘,盘上带有散射装爪,旋转盘通过支臂设置在机器人的最前端,沿导线下沿位置安装,机器人行走时,可通过除冰柱电机带动该星状旋转盘旋转,盘上的几个爪将冰柱击打掉,全过程不伤害导线,为机器人行走扫清障碍。完成第一步除冰;在星状旋转盘的后面,设计左右各1 个敲打锤,通过电机带动曲轴,再带动敲打锤,不停地在导线上对覆冰进行敲打,将覆冰敲打“酥”,轻微的覆冰可以直接敲打掉,厚一些的覆冰被敲打“酥”,实现第二步除冰,为第三步除冰做好准备。结合昭通电网最大覆冰比值0.25 这一实际情况,研究机器人去除导线覆冰方法。采用对齿结构设计,齿牙满足最大覆冰比值要求,机器人行走时,对齿沿导线将覆冰挤压碎,从而实现去除覆冰的目的;在机器人的前端设计有摄像头和LED 照明,可通过视频检查作业质量;机器人外壳绝缘化设计,解决配电线路相间距离小的问题。机器人采用无线遥控操作。
2 控制系统硬件组成及功能
除冰机器人是一种行走在高压线路的机器,对其要实现自动化控制和遥控操纵的2 种方式,使机器能够应对各种复杂的环境,同时在地面上能够实时图像监测机器状态。对这种特殊环境下的机器要具备在恶劣环境中稳定可靠的工作能力。在设计控制系统时刻采用如图3 所示分层式控制系统结构,由电源、动力单元、监控单元组成。通过各个模块间配合工作,可使机器人在复杂的环境下正常运行。控制系统硬件有主板,电源构成,主板由4G 信号透传系统、电源监测保护系统、步进电机驱动系统,信号反馈系统,直流减速电机驱动系统组成,4G 信号透传系统实现与手机App 通信,进行信息交互,控制各个系统工作与监控各个系统状态的功能,步进电机系统控制行走电机前进后退,上轮翻盖,锁扣,预压等功能,直流减速电机系统实现驱动缆绳上下小车,八爪卡盘除冰,锤击电机锤冰的功能,信号反馈系统实现反馈各个系统的状态,摄像头影像,电池电量等信息。控制系统设计如图3 所示。
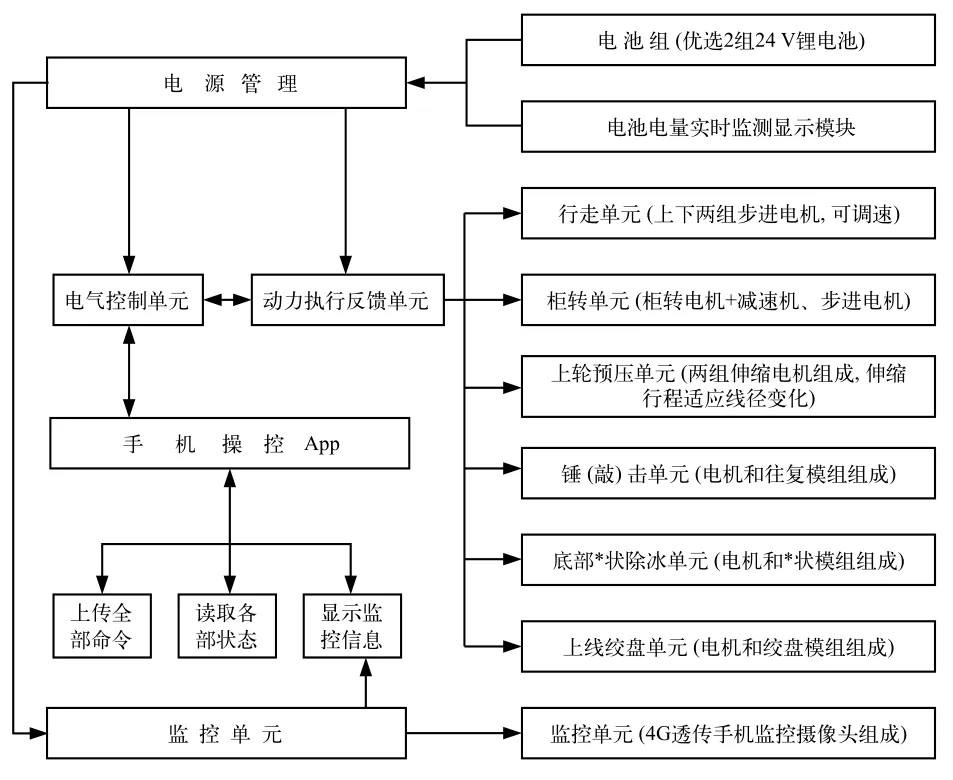
图3 控制系统设计图
3 结束语
配电线路覆冰机器人的研制成功与应用,实现了智能化清除架空线路上覆冰,具有避免工作人员高空作业和减轻工作人员劳动强度等优点,将危险系数高的作业使用机器人替代,进一步提高了作业安全性,除冰机器人以代替人工进行导线除冰是未来的发展趋势,具有良好的应用前景。
