基于鲁棒学习与时空信息素的抗干扰射频层析成像方法
2023-03-22罗春海甘官寿黄子宁郑宜荣黄开德杨志勇
罗春海,甘官寿,黄子宁,郑宜荣,黄开德,杨志勇
(1.佛山科学技术学院 数学与大数据学院,广东 佛山 528000;2.南昌航空大学 软件学院,江西 南昌 330000)
0 引 言
设备免持定位技术(Device-Free Localization, DFL)[1]最早由Moussa和Youssef在2007年提出,这是一种基于无线传感网络中射频节点接收信号强度(Received Signal Strength, RSS)值的变化进行目标定位的方法。2009年由Wilson和Patwari首次将DFL技术问题转化为射频层析成像(Radio Tomographic Imaging, RTI)[2]技术问题,开辟了新的的研究方向。
RTI技术需要在目标环境周围搭建无线传感网络(Wireless Sensor Networks, WSN)[3],形成覆盖目标环境的监测区域,由于该区域内的物体会吸收、反射、绕射或散射部分传输能量,引起节点接收端的接收信号强度(Received Signal Strength, RSS)值变化,利用该变化对其进行阴影衰落分离,便可实现对兴趣目标成像的位置估计。因射频信号具有可穿透非金属物质(例如墙体、烟雾及树木等障碍物)、不受非微波(例如光线、声音、温度等)等因素干扰的优越性,所以RTI技术在智能监控、环境监测、资源勘探、抢险救援以及军事反恐等领域有着巨大的应用前景。
在实际环境中,射频链路RSS基准值易受环境因素影响,兴趣目标与环境发生耦合效应引发多径干扰噪声,导致阴影衰落分离困难,成像受到干扰。因此,建立合理的噪声分布模型是目标重构的重要基础。
本文提出一种基于鲁棒学习与时空信息素抗干扰射频层析成像方法。通过矩阵的低秩性完成对测量矩阵的混合高斯噪声分解,进行迭代以得到背景链路矩阵,利用EM算法求解模型参数获得前景信息。在此基础上,根据目标运动具有时空相关性的特点,引入时空信息素来有效抑制多径干扰噪声,提高目标定位的精度和鲁棒性。
1 基于鲁棒子空间与时空信息素跟踪方法
1.1 时序RSS数据建模
射频层析成像应用需要在目标区域周围部署射频信号收发阵列,形成无线传感网络。其中,阵列由K个射频信号收发节点组成,任意一对节点间的通信被视为一条射频链路,共M=K(K-1)/2条射频链路。
在WSN中,兴趣目标与其射频环境会发生耦合效应,该区域内的物体(包含障碍物)会吸收、反射、绕射或散射链路的传输能量。部署射频节点信号收发阵列如图1所示。

图1 部署射频节点信号收发阵列
针对i条链路的接收信号强度RSS值,建立链路损耗模型如下:
其中:Pi为射频节点发射功率,单位为dB;Li为射频节点间距离、天线工作模式、设备阻抗等方面的静态能量损耗,单位为dB;Si为射频信号受物体阻挡产生的阴影衰减,单位为dB;Fi为物体在网络中由多径效应引起的阴影衰落;εi为测量噪声。
根据式(1),对t时刻的第i条链路RSS值yi建立数学模型:
其中:Pi(t)、Li(t)、SiLoss(t)、FiLoss(t)分别为t时刻的传输功率损耗、静态能量损耗、障碍物与环境等因素引起的阴影衰减、障碍物与环境等因素引起的多径衰落;SiTarget(t)为t时刻的兴趣目标相关阴影衰减;FiNoise、εi(t)分别为t时刻的动态环境因素引起的多径干扰噪声与测量噪声。其中FiNoise随时间变化且在噪声中起主导作用,因此本文针对该种噪声集合建立混合高斯噪声模型。
在以往基于RSS衰减特征的RTI定位算法中,重构图像需要获取RSS值变化链,针对射频链路RSS基准值易受环境因素影响的情况,本文构造一个由RSS值yi按时间间隔Δt组成时序测量矩阵Y,表达式为:
其中:Δt=tj+1-tj,tj={tj|j=0, 1, ...,L}表示信号接收时刻;yi(tj)代表第i条链路在tj时刻的RSS值。因此对测量矩阵Y建模如下:
其中:Y∈RM×L为时序测量矩阵;U∈RM×r和VT∈Rr×L代表时序背景链路矩阵;X∈RM×L代表时序前景信息矩阵[4]。
tj时刻包含噪声的前景信息矩阵为:
其中,xi(tj)为前景信息矩阵X在tj时刻的第i行元素,代表tj时刻第i条链路的前景信息,且xi(tj)为像素向量,等价于pi(tj)=(p1(tj)...pk(tj)...pd(tj))1×d,k为向量索引,d代表像素个数。将行向量pi(tj)扩展为像素矩阵P(tj),可代表tj时刻目标重构影像分布情况,表达式为:
其中,pik(tj)代表tj时刻重构图像的第i条链路上任意一点k的像素取值。
利用低秩矩阵分解[5,6]将时序前景信息矩阵X映射到低维空间:
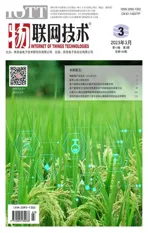
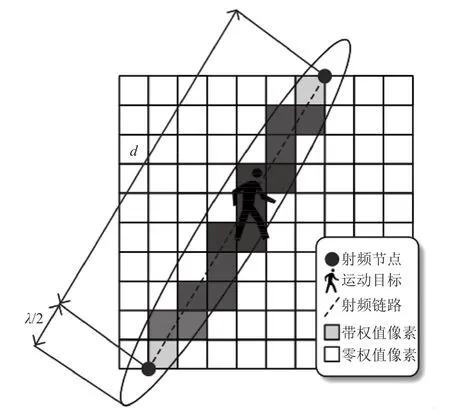
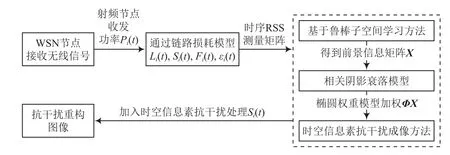
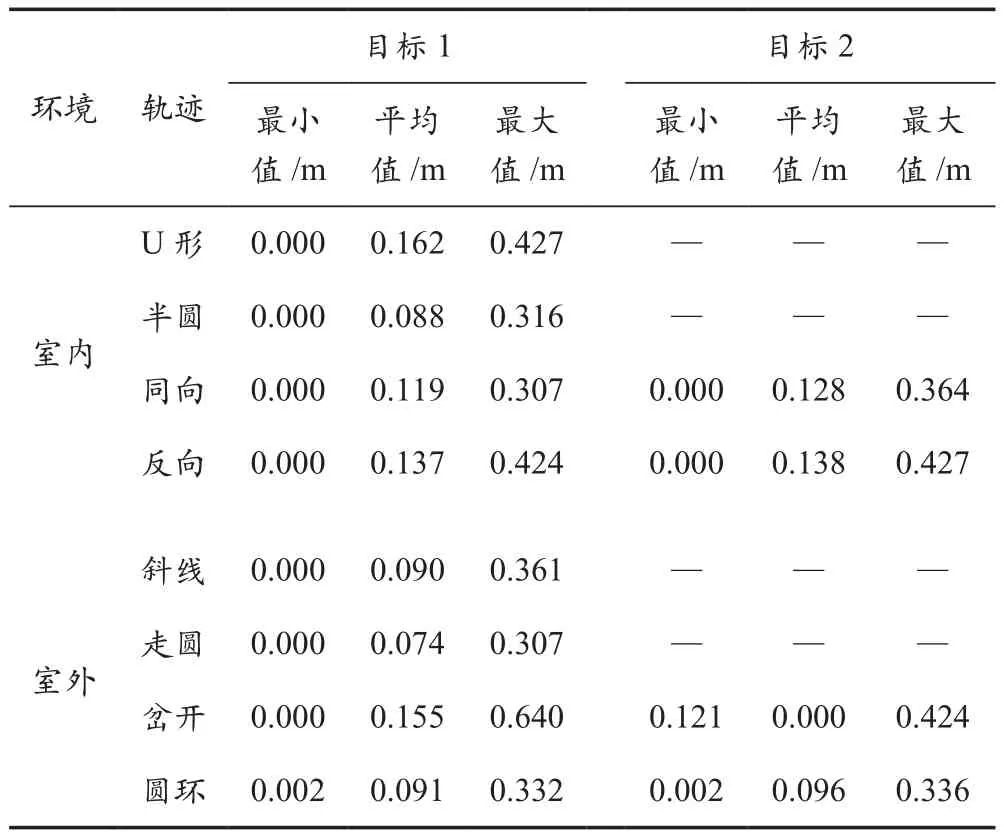
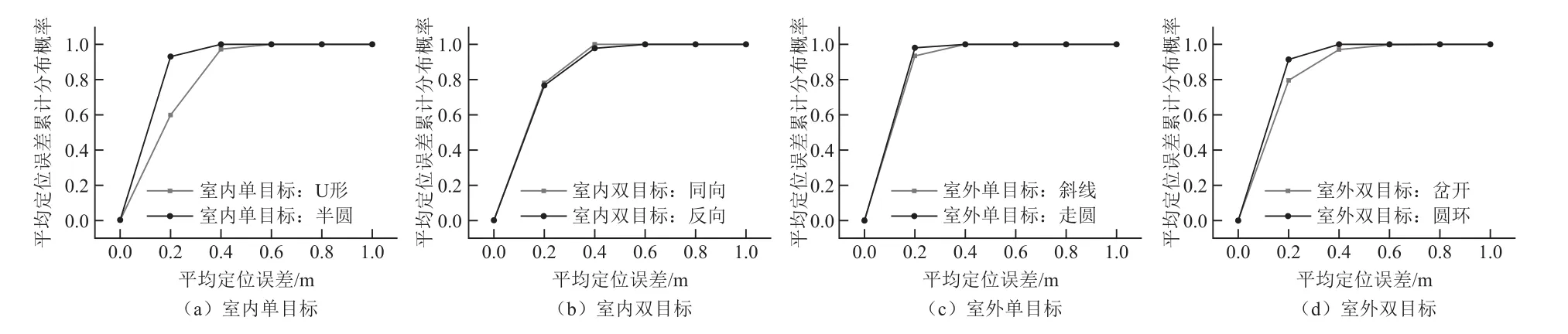
式中:⊙为Hadamard乘积;U表示基矩阵,U∈RM×r;V表示系数矩阵,V∈RL×r;r< 式中:ui、vj分别为U、V矩阵的第i个、第j个行向量,代表背景链路;xij代表前景信息,其中包括前景像素信息与噪声信息;Φ代表相关阴影衰落模型矩阵,本文采用椭圆权重模型。 为尽可能地重构前景信息,利用混合高斯(Mixture of Gaussian, MoG)[7]模型可拟合任何连续分布噪声的特性来对前景信息进行建模,则前景信息矩阵X的稀疏信号可建模如下: 式中:xij为前景信息含噪声合集;K是混合高斯个数,k表示其中任意一个分量编号;πk≥0为混合高斯权重,并且表示均值为0、方差为σ2的高斯分布;为第k个高斯分量的分布。 因此,测量矩阵Y的每个元素yij的概率可建模为: 式中:Π={πi|i=1, 2, ...,πK};Σ={σi|i=1, 2, ...,σK}。 因此,测量矩阵Y的最大似然函数可写为: 式中:Π为所有高斯分量权重集合;Σ为所有高斯分量方差集合;Ω为测量矩阵Y未丢失数据集合;i和j为集合Ω内的行和列索引,之后的研究都在集合Ω内展开。 利用EM[8-9]算法求解有关U、V、Π、Σ参数的最大可能性解,则有: (1)E步骤 定义测量数据相关隐变量:z→Y,令隐分布q(zijk)=γi,j,k表示混合高斯分布中每个数据来源于第k∈{1, 2, ...,K}个分布的概率,则隐变量有离散取值集合Z={z1,z2, ...,zK},采用E步骤对隐变量yijk进行计算,即: (2)M步骤 通过E步骤得到隐变量,后验计算模型参数,M步骤计算框架可优化为: 对Π、Σ参数进行迭代计算: 对U、V参数进行迭代计算: 根据低秩矩阵分解形式,权重矩阵W的元素wij为: 式(16)的极大化完全等价于加权L2LRMF问题,因此本文选择实现简单且性能良好的ALS(Alternated Least Squares)算法对U、V进行交替固定值求解,收敛的U、V矩阵为最优解结果: 对测量矩阵Y使用MoG-LRMF模型,基于鲁棒子空间学习模型的参数估计算法流程如下: (1)输入:测量矩阵Y,Y的非缺失项的索引集Ω。 (2)随机初始化Π、Σ、U、V,MoG-LRMF模型参数K以及迭代阈值。 (3)重复。 (4)采用E步骤计算γijk(i=1, 2, ...,d;j=1, 2, ...,n;k=1,2, ...,K)。 (5)针对Π、Σ采用M步骤计算πk、σk2(k=1, 2, ...,K)。 (6)针对U、V采用M步骤利用ALS算法计算,其中W由式(17)计算得出。 (7)自动K调谐:如果存在i、j使得,则通过,将第i和第j个高斯分量合并为唯一的高斯分量,式中ni表示第i个高斯分量中的元素数,然后从Π、Σ移除第j个高斯参数。最后令K=K-1。 (8)直到收敛。 (9)输出:U、V背景链路矩阵。 根据以上方法得到的时序前景信息矩阵X重构图像,需要用到相关阴影衰落模型来刻画像素值的分布情况,本文采用椭圆权重矩阵Φ来决定像素值的非零权值: 其中:Φik(tj)表示第tj时刻重构像素权值,即tj时刻在第i条链路第k个像素pik(tj)的加权值;d为收发射频节点间距;dik Send(tj)和dikReceive(tj)为像素点pik(tj)与两个收发节点的距离;λ为椭圆超出链路距离的长度,为调节椭圆宽度大小参数,通常设置为一个较小的值,且对所有测量链路所考虑的尺度大小保持一致。第i条链路椭圆权重模型如图2所示。 调查结果表明,湿式诱捕器投放间距10、15、20 m处理诱捕茶尺蠖成虫总量分别为52、316和100头,平均每台为13、79和25头,可见间距15 m处理诱捕量最多,并与其他2个处理均达到显著差异,较好地控制了茶园茶尺蠖。因此,湿式诱捕器在茶园的设置密度以间距15 m较好。 图2 第i条链路椭圆权重模型示意图 根据相关阴影衰落椭圆权重模型[10-11],可以大致刻画出某一时刻任意一个像素点与所在链路之间的关系,其中加权值则代表像素点处阴影衰落影响链路的程度,便可获得重构图像: 其中:s(tj)=(tj)⊗h(tj)为tj时刻带有时空信息素的重构像素;h(t)为高斯卷积核,决定时空信息素点值的扩散程度;ρ为挥发率,代表时空信息素挥发程度,取值区间为[0,1],其中ρ越大挥发速率越快,ρ越小挥发速率越慢。 本文的WSN实验环境在室内与室外均有部署,覆盖监测区域大小为5 m×5 m,一次性共部署20个射频信号收发节点,相邻节点间距为1 m。室内室外实验场景与平面图如图3所示。 图3 室内室外实验场景与平面图 网络基于MICAz节点[12-13],工作频率为2.4 GHz,采用IEEE 802.15.4标准通信协议。节点的传输功率为-10 dBm。选择1号节点作为基站,对其他射频节点采集的数据通过USB接口传输至计算机后进行处理。 根据部署顺序,对射频节点逐个标记ID号并设置相应传输协议。为避免各节点间传输冲突,具体传输协议内容如下:从节点ID为1至20发送数据,当任意一个节点为发送信号状态时,其余射频节点切换为接收状态,并检查该发送节点ID编号;随后按ID编号顺序轮流切换收发状态;重复检查是否轮到当前节点为发送状态,否则节点为接收状态并继续等待。若出现信号阻塞、射频节点响应超时等情况,则立即跳过当前节点,按照ID编号顺序轮至相邻节点继续发送信号。 基站接收节点所收到的数据,包括发送节点的编号以及编号对应节点的RSS值,若接收到基站本身的信号则RSS值设定为-45 dBm。一个节点传输一次数据的过程记为1个周期(1个周期花费时间约为0.545 s)。 所有方法都在MATLAB 2020a上实现,并配备在Intel(R) i7-9750H(CPU)、GeForce GTX 1650(GPU)和16 GB RAM的PC上运行。 如图4所示,本文射频层析成像过程主要分为三个阶段:(1)通过部署WSN节点,覆盖目标空间形成监测区域,采集来自各个射频链路的节点RSS值组成测量矩阵;(2)对测量矩阵进行低秩矩阵分解,利用混合高斯模型对包含多径衰落噪声的前景部分进行建模,利用鲁棒子空间学习方法求解参数,实现对测量矩阵Y的有效分解;(3)对分解出的前景信息矩阵X,利用目标运动具有时空相关性的特点,使用椭圆权重模型对链路上像素点进行加权表示,引入时空信息素图抑制多径干扰噪声,提高目标定位的精度和鲁棒性,最后得到具有噪声抗干扰性的重构图像。 图4 基于鲁棒学习与时空信息素抗干扰方法框架 表1的重构图像结果表明,本文方法在室内(外)针对单目标运动的射频层析成像结果清晰准确,能够呈现出基本贴近实际的目标运动轨迹,并有效对抗多径效应干扰;在室内复杂场景下,针对双目标同向走圆、反向走圆的复杂运动,依然能较为清晰地重构出大致结果;本文方法在室内(外)针对双目标运动的射频层析成像结果较为清晰,并且在运动物体较为贴近时,仍能有效对抗物体运动间产生的多径效应干扰,在实际实时成像中呈现出分辨度更高的结果。 表1 本方法室内(外)的单(双)运动目标重构图像结果 3.3.2 平均定位误差分析 如图5的重构轨迹对比结果表明,本文方法在室内(外)情况下,针对单(双)运动目标可以很好地重构出贴合实际运动的目标轨迹,重构与真实轨迹误差均在1 m范围以内。本方法能够有效对抗多径效应干扰,大幅提高误差精度,缩小定位误差范围,具有很好的抗干扰性与鲁棒性。 图5 室内(外)的单(双)运动目标的实际运动轨迹与本方法的重构轨迹对比结果 表2的实验结果表明,在室内(外)WSN覆盖区域大小为5 m×5 m的监测范围内,单运动目标定位误差最大不超过0.427 m,双目标运动定位误差最大不超过0.640 m,整体平均定位误差最大不超过0.162 m,最优情况下单(双)目标平均定位误差最小值仅为0.002 m。 表2 室内(外)的单(双)运动目标平均定位误差结果 图6所示的室内(外)单(双)运动目标平均定位误差累计分布计算中采用真实位置与估计位置的OMAT距离来衡量定位性能,其计算公式为: 图6 室内(外)的单(双)运动目标平均定位误差累计分布曲线 其中:g为真实目标的位置;G为真实目标的个数;Ψ表示重构出的所有非零位置;OMAT 距离为从所有非零位置中选出最接近真实目标位置的G个位置作为估计位置后计算与真实目标位置g的误差距离。 实验结果表明,室内(外)的单(双)运动目标在0.2 m处误差均快速收敛,接近90%的概率使定位误差不超过0.4 m。 3.3.3平均定位时间分析 表3的实验结果表明,本方法针对室内(外)的单(双)运动目标平均定位时间均在0.03~0.05 s左右,最快平均定位时间在0.0317 s,满足毫秒级定位,具有快速性。 表3 室内(外)的单(双)运动目标平均定位时间结果 针对射频链路接收信号强度(RSS)基准值易受环境因素影响,以及兴趣目标与环境耦合会引发多径干扰造成射频层析成像性能衰退问题,本文提出基于鲁棒学习和时空信息素的抗干扰成像方法。链路RSS表示为环境相关的背景和目标运动相关的前景两部分,构造RSS时间序列矩阵,其中背景部分通过矩阵低秩性建模,前景通过混合高斯分布建模,形成对RSS测量噪声鲁棒的MoG-LRMF模型,设计EM算法求解模型参数以获得前景信息。以此为基础实现目标成像,根据目标运动具有时空相关性的特点,引入时空信息素图抑制多径干扰噪声,提高目标定位的精度和鲁棒性。实验结果表明,本方法在室内及室外均表现良好,对于存在外部物体运动或阻挡的情况下仍能有效实现单(双)目标的成像,具有较好的抗干扰性、鲁棒性和快速性。1.2 基于鲁棒子空间学习模型的参数估计
2 时空信息素抗干扰成像方法
3 实验与结果分析
3.1 射频感知网络实验环境搭建

3.2 实现过程
3.3 结果分析


4 结 语