塔式光聚热熔融盐液位激光差分检测技术研究
2023-03-22徐卫兵闫慧民
徐卫兵,赵 伟,王 晓,闫慧民
(1.中国电建集团西北勘测设计研究院有限公司,陕西 西安 710065;2.太阳能利用工程技术研究所,陕西 西安 710065)
0 引 言
太阳能热发电是太阳能高效利用的一个重要方向。其中,塔式太阳能光热发电技术因其高聚光比、高工作效率和易于储能的特点[1-3],在新能源发电领域得到广泛关注。双罐式熔融盐储热系统作为塔式太阳能热发电系统的重要组成部分,主要实现能量存储和交换的功能[4]。太阳能吸热器通过加热冷罐中的熔融盐并将其储存进热罐完成储能[5]。热交换器通过抽取热罐中熔融盐产生蒸汽发电后将冷熔融盐回流至冷罐完成能量释放[6-7]。
通过精确测量密闭的冷热罐内熔融盐液位,能间接反映储能情况。由于熔融盐储罐尺寸约为直径40 m、高10 m,要求测量精度达到1 mm。然而由于冷盐罐的温度为230 ℃左右,而热盐罐的温度高达650 ℃以上,熔融盐储热罐内是属于高温、高压及密闭的环境,采用传感器液位测量技术[8]时,接触高温液面易导致损坏,并且密闭环境下不易操作。非接触式的液位测量技术,如超声波液位测量技术[9]、雷达液位测量技术[10]等,在熔融盐储热罐复杂的内部环境下,也均无法长期准确地测量熔融盐液位值。为此,本文设计并实现了一个基于光学三角法理论的熔融盐液位测量装置,该装置在罐外加以抗高温高压的高透射装置,不受温度、压力环境因素的影响。同时,针对熔融盐快速出入储热罐产生的液面晃动问题,设计了双激光线检测法,有效削弱了液面晃动对液位测量造成的影响。
1 高温熔融盐液位测量装置设计
1.1 单激光测量装置
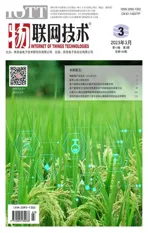
基于单激光液面的测量装置采用光学三角法原理。依据激光器的发射位置,光学三角法分为直射式与斜射式[11],本文就斜射式三角测量法进行说明。如图1所示,激光发射器安装在罐顶一侧,激光器发射的激光束通过会聚透镜照射到液面上,在液面上形成一个光斑。当液面位置有所变化时,激光束在液面上形成的光斑位置也会随之有规律变化。图像采集器安装在罐顶正上方,图像采集器采集到光斑图像,通过图像处理算法获取光斑位置信息。然后再根据激光光源位置、图像采集器位置与光斑位置的几何关系模型,获得液位的实际测量高度。
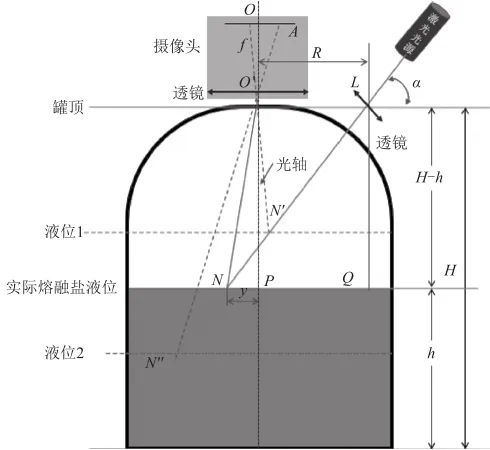
图1 单激光液位测量装置安装示意图
由于液面会产生波动现象,本文的激光发射器选用一字型激光器,当液面波动时,一字型激光器的激光线总有部分平整,避免了采用点激光而带来的信号不连续问题[12,13]。液位图像的采集通过带镜头的CMOS摄像头完成。如前文提到,由于罐内高温高压的内部环境,而将激光装置与摄像头装置安装在罐外,且激光装置与摄像头装置加以抗高温高压的高透射装置[14],保证其能正常运行。
1.2 单激光测量装置光路图模型建立
本文根据实际情况对光学三角法公式作了进一步整理。如图1所示,罐体高为H,罐内熔融盐液位为h。一字型激光器安装在罐顶一侧,入射点为L,并且入射角与罐体水平夹角为α。CMOS摄像头安装在罐顶正上方O点,摄像头镜头焦距为f,摄像头光轴与液面的垂直投影为P。R为L点到光轴的距离。N为激光源在液面上投射的激光线,且到光轴的距离为y,A为激光线N在感光元件中的成像位置,AO=x。由图1有如下公式:
可得关系:
推导出来的公式(4)即为斜射式单激光熔融盐液位测量计算方式。其中,H已知,x为CMOS采集到的图像中成像的激光线与中心点像素的直线距离,该值可以通过图像处理算法获取,本文在实际过程中采用的是图像像素的加权平均值法。公式中α、R、f三个参数为安装参数,为了使测量结果更准确,需要消除安装参数带来的系统误差,本文使用最小二乘法对这三个参数进行标定,具体如下,假定激光线成像于图像原点右侧,令:
上式可以表示为:
根据最小二乘法的标定公式可得:
测得n组观测数据[xi,yi](激光线位置以及液面高度),根据式(7)、式(8)便可得出b和k的值。b、k的值需要在液面保持平静的状态下进行标定,公式(4)可改写为:
1.3 双激光检测法
根据实际情况,当熔融盐高速出入罐体时,熔融盐液面会产生剧烈的晃动情况。单激光液面测量在此种情况下误差较大。因此,为了进一步提高测量精度,本文在罐体的另一侧同样放置了一个激光发射器,如图2所示;用罐体正上方的摄像头同时捕捉双激光线,捕捉到的双激光线示意图如图3所示。

图2 双激光线液位检测装置示意图

图3 双激光线示意图
双激光液位检测计算方法与单激光液位测量计算方法类似,同样通过采集图像像素的加权平均值法获取激光线1与激光线2在采集图像中的位置x1和x2,再分别代入公式(9)计算出液位值h1和h2,最后求h1和h2的平均值来计算更精准的液位高度,公式如下:
双激光检测法除了能提高液面检测的精准度外,同时还能有效地避免单激光检测存在的盲区问题。
2 高温熔融盐液位测量系统
2.1 硬件结构
本文开发了一套嵌入式高温熔融盐液位测量装置,实物如图4所示,高透装置采用的是蓝宝石玻璃,与测量装置用法兰无缝连接。装置主要包括CMOS摄像头图像采集模块、图像处理模块、LCD触摸屏模块、电源模块和网络模块等。

图4 装置整体侧视图
ARM处理器选用的是基于ARM920T内核的嵌入式微型处理器S3C2440A。CMOS摄像头选用的MT9T001,主动成像大小为6.55 mm×4.92 mm,有源成像像素阵列为2 048×1 536。网络模块采用的是以太网接口芯片W5500,主要的作用是图像信息的传输。LCD触屏选用的是天嵌科技的4.3寸触摸屏,该模块的作用主要是显示采集到的图像、相机信息的设置、系统的参数标定等,实现了人机交互功能。电源模块分为两部分:一是DC-24 V到DC-5 V的转换(MP2359芯片);二是DC-5 V到DC-3.3 V的转换(LM1117-3.3芯片)。
2.2 人机交互界面设计
本课题在μC/OS-II嵌入式操作系统上移植了UCGUI图形界面系统,在此系统上结合LCD控制器设计了四个界面,分别为系统主界面、相机参数设定界面、系统标定界面、通信参数设定界面,如图5~图8所示。根据界面上的按钮或者编辑框实现人机交互,提高了测量装置的实用性。
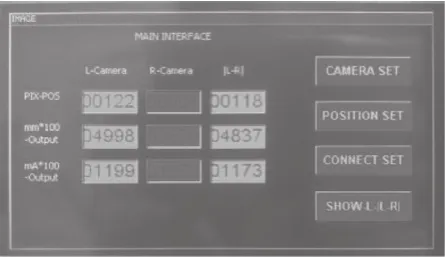
图5 主界面

图6 相机参数设定界面
图7 系统标定界面

图8 通信参数设定界面
3 实验与结论
3.1 装置安装参数的标定
实验选择普通罐,模仿高温熔融盐罐体。如图9所示,将检测装置固定在高为100 cm的罐体上方,激光器和测量装置距离罐体高50 cm。设置安装参数为α=70°、R=25 cm、f=2 cm,给罐体内加液体,初始液位为20 cm;然后给罐体继续加液体,每次使液位升高1 cm左右,并用标度尺测量液位高度;同时,系统利用图像像素的加权平均值获取CMOS摄像头采集的图像中的激光线位置x,连续采集30组数据。利用公式(7)和(8)得到参数k=0.649 3,b=-49.910 5。
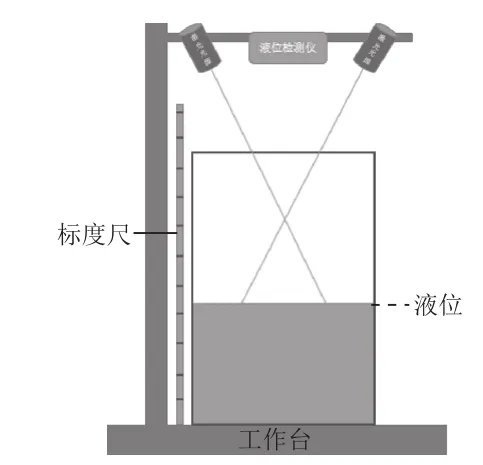
图9 系统标定的结构框图
安装参数为α=70°、R=25 cm、f=2 cm,实际上Rf=50、fcotα=0.727 9, 标 定 后 的 参 数Rf=49.910 5、fcotα=0.649 3。产生此误差可能由于摄像头光轴与液面没有完全垂直,或测量过程中液面有一定程度的倾斜[13]。
3.2 双激光线检测法验证
双激光液位检测实验前,根据3.1节实验部分的装置参数标定方法进行参数标定,认为真实液位与测量液位误差小于0.2 cm为标定成功,否则对装置进行重新标定。向罐内快速加入一定量液体,使液面产生晃动,在规定时间内采集30组数据,左侧激光测量出来的液位值记为h1,右侧激光测量出来的液位值记为h2,两者平均值记为h3,待液面恢复平静时高度为66.9 cm。
分析实验获取的30组数据,根据左激光器、右激光器以及双激光测出液面高度的均方根误差分别为0.2 816、0.3 062、0.2 129,标准差分别为0.2 816、0.3 067、0.2 138。根据实验数据可知,双激光检测法测出的结果均方根误差、标准差均最小。绘制30组数据结果如图10所示,横坐标为采集次数,纵坐标为计算出来的液位高度。从图可以看出,双激光线测量出来的液位值误差最小,更接近真实值。

图10 双激光线检测结果
4 结 语
本文提出了一种能够精确测量冷罐和热罐内熔融盐液位的方法,不仅可以推算出电站的储能量,还可以通过液位的差分变化估算熔融盐流速。从实验结果可得,在熔融盐液位存在明显晃动的情况下,基于双激光检测法的高温熔融盐液位测量结果比单激光液位检测方法的结果误差小,更接近真实值。可见,双激光检测可以有效解决液位晃动情况下的液位测量问题。同时,将本文实现的硬件测量装置安装在熔融盐罐外,很好地解决了安装与维护问题。