一种空间用大口径扫描装置锁紧机构设计
2023-03-20赵鑫于婷婷赵亨何东科张宁
赵鑫 于婷婷 赵亨 何东科 张宁
一种空间用大口径扫描装置锁紧机构设计
赵鑫 于婷婷 赵亨 何东科 张宁
(北京空间机电研究所,北京 100094)
由于红外探测器尺寸限制,大多数光学遥感器仍采用扫描装置来扩大探测视场,随着相机口径及探测视场的增大,扫描装置中扫描镜口径越来越大,对扫描镜支撑元件的承载能力要求也随之提高。文章为了确保某项目扫描装置中的扫描镜支撑元件不被过载破坏,根据扫描镜口径及过载条件,提出一种高承载能力、高刚度、可重复使用,且能够满足支撑元件过载受力要求的锁紧机构;阐述了锁紧机构的组成和工作原理,针对过载要求分析了锁紧机构核心部组件的承载能力及锁紧力,并根据过载条件进行了力学仿真分析;最后开展了振动试验,结果表明该锁紧机构可对扫描装置中扫描镜支撑元件安全锁紧。
红外遥感相机 扫描装置 锁紧机构 航天遥感
0 引言
扫描式空间光学遥感器利用光学反射原理,将入射光通过扫描装置引入到主光学系统来扩大观测视场,在今后相当一段时间仍然具有广阔的发展空间[1-2]。扫描装置一般由扫描镜、驱动电机、反馈元件、支撑元件及基座等结构件组成,线阵探测器、小视场光学系统配合扫描装置的摆扫运动并与卫星运动相结合,实现对目标的成像[3-4]。随着探测视场需求的提升,扫描装置中扫描镜口径由原来直径400mm增大到直径800mm及以上,对扫描镜支撑元件的承载能力要求也随之增大。扫描镜支撑元件的承载能力和性能直接影响扫描装置的寿命和运转精度,而其承载能力受发射过程中的过载影响较大,因此,对扫描镜可靠锁紧已成为保证扫描装置在轨良好运转的关键。
遥感器扫描装置锁紧机构属于空间重复锁紧技术领域,要保证在锁紧和解锁时均安全可靠。早期的锁紧释放方法主要是火工技术,但是火工产品爆炸产生的冲击会对精密仪器设备造成损坏。由于火工技术的局限性,使得低冲击、零污染、可重复使用的新型重复锁紧释放技术在近几十年得以快速发展[5-6]。锁紧释放装置按照重复锁紧机构的类型,可分为机械式、记忆合金式、电磁式等[7-10]。机械式锁紧释放装置是利用电机驱动锁钩/卡爪或螺栓螺母达到重复锁紧的目的,电磁式锁紧释放装置是利用电磁铁产生的电磁吸力实现重复锁紧[11],记忆合金式锁紧释放装置是利用形状记忆合金(SMA)作为驱动元件实现锁紧释放的目的[12-13]。当扫描镜支撑元件的承载能力大于发射过载力时,目前大多数扫描装置采用可重复使用的电磁式或螺栓螺母式锁紧机构,这两种锁紧方式仅限制扫描镜转动,确保发射过程中支撑元件承受额定静载,优点是锁紧机构简单,缺点是无法对支撑元件起到保护作用,支撑元件尺寸随着扫描镜口径的增大而增大,导致整个扫描装置的体积、质量及功耗增大。当扫描镜支撑元件的承载能力小于发射过载力时,个别扫描装置牺牲地面测试环节,采用火工品或记忆合金式锁紧装置将扫描镜锁紧,优点是锁紧后可保护扫描镜支撑元件免受过载破坏,缺点是不可重复使用,导致扫描装置乃至整个光学遥感器地面测试覆盖性不足[14-16]。
本文针对某项目扫描装置锁紧刚度、精度及重复锁紧解锁要求,提出一种可重复锁紧解锁的高刚度、高精度锁紧机构,给出了锁紧机构的组成和工作原理,分析了锁紧机构中关键部组件的承载能力,驱动电机的锁紧力、锁紧精度及锁紧刚度,并开展了试验验证。
1 方案选择
本项目扫描装置中的扫描镜质量为10kg,要求可承受30n过载。扫描镜由2个枢轴支撑于基座上,枢轴过载安全系数要求大于1.5。所选枢轴径向承载能力为251.77N,轴向承载能力为1 000.85N,径向刚度为3 853N/mm,轴向刚度为6 480N/mm。扫描镜承受30n过载时所受过载力为2 940N,单个枢轴径向过载力为1 470N、轴向过载力为2 940N,远超过枢轴径向和轴向的承载能力。因此,要求增加锁紧机构对扫描镜进行锁紧,锁紧后过载力由锁紧机构承受,起到保护枢轴的作用,当过载结束后,锁紧机构可靠解锁,扫描镜处于正常工作状态。同时还要求锁紧机构可重复使用,锁紧/解锁状态可监测,锁紧/解锁过程中不能产生多余物质。
根据上述要求可知,需要对支撑扫描镜的2个枢轴同时进行锁紧。锁紧机构在锁紧/解锁过程中不允许对枢轴施加额外载荷,锁紧支撑刚度要远大于枢轴的刚度,故锁紧机构需要具备高承载能力、高支撑刚度、高运行精度、长寿命等特点。选用具备高承载能力、高支撑刚度、高运行精度的直线滚珠导轨、滚珠丝杠和大接触角轴承作为锁紧机构主要部组件,采用具备大保持力矩且控制简单的步进电机作为驱动部件,采用减速齿轮副提高锁紧机构运行精度及锁紧保持力,采用LVDT直线位移传感器实现高重复锁紧精度。本文所设计的锁紧机构主要由直线滚珠导轨、滚珠丝杠、大接触角轴承、步进电机、减速齿轮副、锁紧销、锁紧动盘、锁紧盘及其他结构件组成。决定锁紧力的主要因素是步进电机的单项加电保持力矩、滚珠丝杠导程及减速齿轮副的减速比;决定锁紧刚度的主要因素是直线滚珠导轨、滚珠丝杠及轴承的刚度。锁紧机构结构组成如图1所示。

图1 锁紧机构结构组成
锁紧机构的工作过程主要包括:1)锁紧过程。当需要对扫描装置进行锁紧时,步进电机逆时针转动(面向电机转轴定义转向)驱动锁紧盘沿导轨运动,当达到LVDT标定的锁紧位置时步进电机停止转动,此时锁紧盘中的锁紧销正好插入锁紧动盘销孔中,实现锁紧。2)锁紧保持过程。当需要进行力学试验或发射前,锁紧到位后步进电机保持单向加电,提供足够的锁紧保持力。3)解锁过程。当需要对扫描装置进行解锁时,步进电机顺时针转动(面向电机转轴定义转向)驱动锁紧机构中的锁紧盘沿导轨运动,当达到LVDT标定的解锁位置时步进电机停止转动并断电,此时锁紧盘中的锁紧销脱离锁紧动盘销孔,实现解锁。
将上述两套锁紧机构分别安装于扫描装置扫描镜两侧(图2中+和-侧),两套锁紧机构同时运动,实现对扫描装置中扫描镜的锁紧和解锁,锁紧机构在扫描装置中的具体安装形式如图2所示,图中向为相机光轴方向(垂直纸面向内),向为扫描镜转动轴线方向(水平向右),向为发射方向(竖直向上)。

图2 锁紧机构在扫描装置中的安装形式
2 部件选型及校核
根据图2可知,扫描装置中锁紧机构实施锁紧后,扫描镜径向过载力(图2中向和向过载)主要由锁紧机构中直线滚珠导轨承受,扫描镜轴向过载力(图2中向过载)主要由锁紧机构中滚珠丝杠和轴承承受,轴向锁紧力由步进电机单项加电保持力矩提供。故在选择直线滚珠导轨、滚珠丝杠、轴承时主要考虑各自的承载能力及支撑刚度,在各部件不被过载破坏的前提下确保锁紧机构的支撑刚度。在设计减速齿轮副减速比及选择步进电机时,主要考虑步进电机单项加电保持力矩能否提供足够的轴向锁紧力。
(1)直线滚珠导轨选型校核
扫描装置径向过载主要依靠扫描镜两侧锁紧机构中的直线滚珠导轨承受,要求直线滚珠导轨的承载能力、支撑刚度及运行精度高,本文选定型号为HSR15R1QZSSC0M直线滚珠导轨,其基本额定静载荷01为15.7kN、基本额定动载荷1为10.9kN。扫描镜径向过载力同时由+侧和-侧两套锁紧机构承受,单套锁紧机构所承受的径向过载力为1 470N,由一对导轨承受,故单个导轨需要承受的径向力r为735N。
导轨静态过载安全系数1计算公式为

式中H为硬度系数,导轨硬度为58~64HRC之间,取1;T为温度系数,使用环境温度小于100℃,取1;C为解除系数,均为单滑块,取1。
(2)滚珠丝杠和轴承选型校核
扫描装置轴向过载主要依靠扫描镜两侧锁紧机构中的滚珠丝杠及支撑轴承承受,选用JGS083滚珠丝杠,导程h为2mm,公称直径16mm,有效行程8mm,其轴向基本额定静载荷02为17 900N、基本额定动载荷2为6 100N。为了提高轴向支撑刚度,选用高轴向刚度的大接触角轴承,轴承型号为7300B,其轴向基本额定静载荷03为8 950N、基本额定动载荷3为4 150N。扫描镜轴向过载力分别由+侧和-侧单套锁紧机构承受,单套锁紧机构所承受的轴向过载力为2 940N,同时由滚珠丝杠和轴承承受,故滚珠丝杠和轴承需要承受的轴向力a为2 940N。
滚珠丝杠静态过载安全系数2和轴承静态过载安全系数3计算如下:

(3)步进电机的选型校核


选用具有在轨应用经历的J55BYG450感应子式步进电机,单项加电保持力矩b为0.392N‧m。则锁紧机构可提供的最大轴向锁紧力a′为

锁紧机构轴向锁紧安全系数4为
本文所选步进电机步距角为0.9°,滚珠丝杠导程h为2mm,齿轮副减速比为4.105,则锁紧机构运行精度为
通过上述计算分析可知,直线滚珠导轨、滚珠丝杠、轴承等关键部件的过载安全系数均大于1.5,步进电机轴向锁紧安全系数大于1.5,因此,扫描装置在经历30n过载时,锁紧机构中关键部件不会发生过载破坏。锁紧机构运行精度0.001 2mm,锁紧过程中不会对扫描镜支撑元件施加额外载荷。
3 过载仿真分析
将锁紧机构安装至扫描装置轴系两侧,锁紧销与锁紧盘采用固定连接,锁紧销与锁紧动盘之间的约束沿、方向平移,绕、、转动,其他结构件之间固连,固定扫描装置安装螺栓孔,对锁紧后的扫描装置在、、三个方向分别施加30n过载进行仿真分析,分析结果如图3所示。
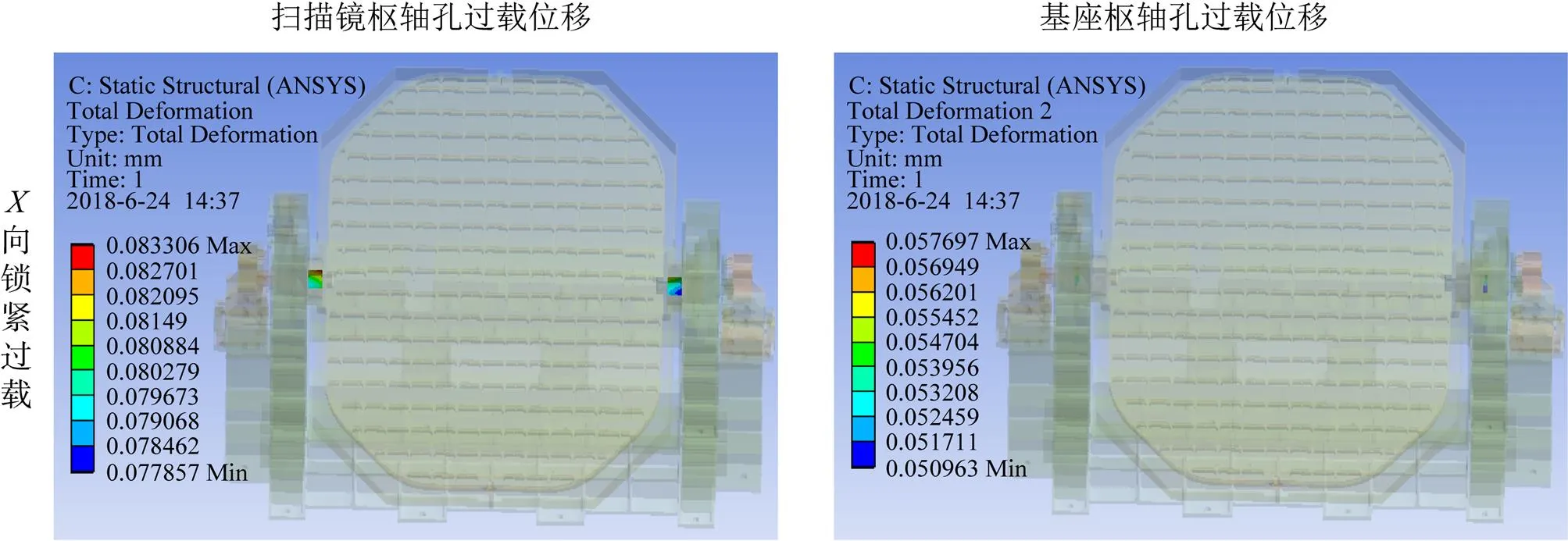
扫描镜枢轴孔过载位移减去基座枢轴孔过载位移为锁紧后枢轴过载位移量,向、向过载位移量与枢轴径向刚度之积为枢轴向、向径向过载力,向过载位移量与枢轴轴向刚度之积为枢轴轴向过载力,枢轴三个方向过载受力如表1所示。

表1 枢轴过载分析
由表1可知,扫描装置安装锁紧机构并实施锁紧后,在30n的过载加速度下,枢轴在、、三个方向的过载安全系数均大于1.5,满足过载要求,锁紧可靠。
4 试验验证
为了检验锁紧机构的锁紧能力,按照项目要求,对安装了锁紧机构的扫描装置开展了正弦振动试验,振动试验分三个方向开展,正弦振动输入条件如表2所示。
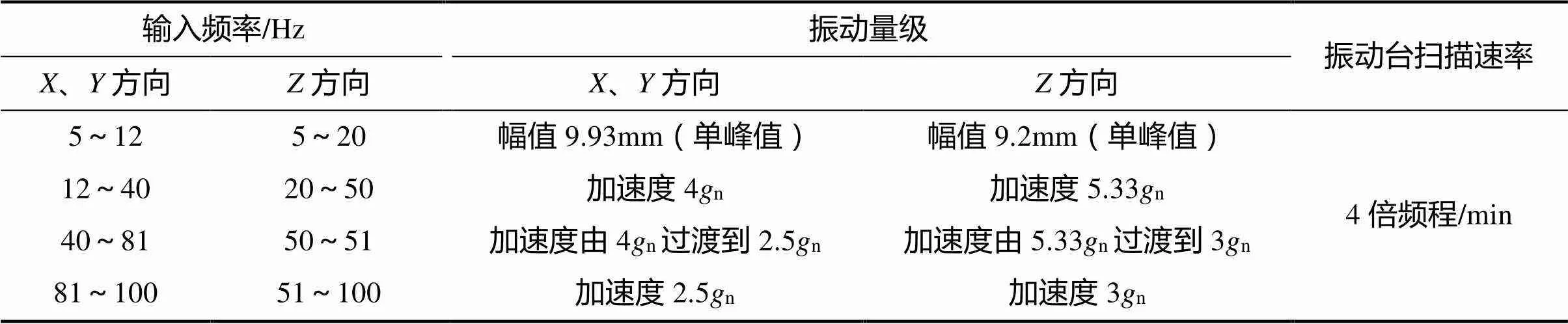
表2 正弦振动试验输入条件
试验过程中,在扫描装置锁紧机构安装位置和扫描镜枢轴安装位置均安装测点,通过对比锁紧机构安装位置和扫描镜枢轴安装位置测点的振动响应,判断锁紧机构的锁紧力和锁紧刚度是否满足要求。测点布设情况如下:1)在枢轴安装位置扫描镜+侧的、、方向分别设置测点Ch5、Ch7、Ch6,扫描镜-侧、、方向分别布设测点Ch8、Ch10、Ch9;2)在锁紧机构安装位置扫描镜+侧的、、方向分别设置测点Ch13、Ch11、Ch12,扫描镜–侧的、、方向分别布设测点Ch16、Ch14、Ch15。各测点的正弦振动响应曲线如图4所示。

图4 正弦振动响应曲线
由图4可知,正弦振动试验过程中,扫描镜枢轴安装处与锁紧机构安装处正弦振动响应基本一致,说明扫描装置通过锁紧机构实施锁紧后,正弦振动响应无明显放大,锁紧机构的锁紧力和锁紧刚度得到检验。
为了判断锁紧机构在正弦振动试验过程中是否发生结构变形或刚度变化,在每个方向振动试验前和试验后均进行一次扫频试验,扫频试验输入条件为:频率范围10~1 000Hz;加速度0.2n;扫描方向为、、向;振动台扫描频率4倍频程/min。
试验结束后,分别对比扫描镜+侧枢轴安装位置在正弦振动试验前后的扫频曲线,结果如图5所示。
由图5可知,扫描装置正弦振动试验前后的扫频曲线基本重合,表明试验过程中扫描装置及锁紧机构的刚度没有发生明显变化,扫描装置及锁紧机构无结构变形。

图5 振动前后扫频曲线对比
试验后锁紧机构可靠解锁,对锁紧机构锁紧位置精度进行复测发现,试验前后锁紧位置变化在要求的0.002mm以内,且试验后检测扫描装置的功能、性能及扫描镜面形均无明显变化,表明所研制的锁紧机构在振动试验过程中对扫描装置起到了有效保护作用,锁紧机构的锁紧能力得到了检验。
5 结束语
针对某项目扫描装置要求,设计了一种高承载能力、高刚度、可重复使用的锁紧机构,根据过载要求和枢轴承载能力,对锁紧机构主要部组件的强度和锁紧力进行校核,最大锁紧力可达5 052.3N;对锁紧后扫描装置进行过载仿真分析,枢轴过载安全系数均大于1.5,满足过载要求;通过力学试验验证可知,扫描镜枢轴安装处与扫描装置锁紧机构安装处正弦振动响应基本一致,振动试验过程中锁紧机构对扫描装置起到了有效保护作用。
另外,在振动试验过程中发现扫描镜长轴两端振动响应较大,当扫描镜口径进一步增大或过载要求进一步增大时,只在扫描镜两侧锁紧无法做到对扫描镜的刚性锁紧,存在枢轴过载力超过其承载能力的风险。故需优化锁紧机构承载能力和锁紧刚度,在扫描镜转轴两侧和长轴两端均安装一套锁紧机构,进一步提升锁紧刚度,减小枢轴过载力。
[1] 范东栋, 李志, 曲广吉, 等. 星间红外探测与测量系统[J]. 航天返回与遥感, 2005, 26(3): 22-27.
FAN Dongdong, LI Zhi, QU Guangji, et al. The Application of Staring Infrared Imaging System in Inter-satellite Measurement[J]. Spacecraft Recovery & Remote Sensing, 2005, 26(3): 22-27. (in Chinese)
[2] 陈世平. 空间相机设计与试验[M]. 北京: 中国宇航出版社, 2003: 165-231. CHEN Shiping. Space Camera Design and Experiment[M]. Beijing: China Aerospace Press, 2003: 165-231. (in Chinese)
[3] 高卫军, 袁立. CBERS1卫星红外多光谱扫描仪扫描子系统[J]. 航天返回与遥感, 2001, 22(3): 31-33.
GAO Weijun, YUAN Li. The Scanning Subsystem of Infrared Multi-spectral Scanner for CBERS-1 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2001, 22(3): 31-33. (in Chinese)
[4] 袁立. 空间遥感器大口径轻量化扫描镜材料发展与制作方法探讨[J]. 航天返回与遥感, 2002, 23(1): 18-20.
YUAN Li. Discuss on Materials and Manufacture of the Big Lightened Scan Mirrors[J]. 2002, 23(1): 18-20. (in Chinese)
[5] 杨泽川, 罗汝斌, 廖鹤, 等. 空间重复锁紧技术综述[J]. 航天返回与遥感, 2019, 40(4): 10-21.
YANG Zechuan, LUO Rubin, LIAO He, et al. Overview of Reusable Locking Technology in Space[J]. Spacecraft Recovery & Remote Sensing, 2019, 40(4): 10-21. (in Chinese)
[6] 韩邦成, 刘强. 基于自锁原理的磁悬浮飞轮电磁锁紧机构[J]. 光学精密工程, 2009, 17(10): 2456-2464.
HAN Bangcheng, LIU Qiang. Electromagnetic Locking Device Based on Self-locking for Magnetic Suspended Flywheel[J]. Optics and Precision Engineering, 2009, 17(10): 2456-2464. (in Chinese)
[7] 闫晓军, 苏宁, 张小勇, 等. 采用形状记忆合金驱动的空间压紧释放装置研究进展[C]//第二届中国航天空天动力联合会议, 大连, 2017.
YAN Xiaojun, SU Ning, ZHANG Xiaoyong, et al. Research Progress of Space Compression Release Device Driven by Shape Memory Alloy[C]//The 2nd JCAP. Dalian: [s.n.], 2017. (in Chinese)
[8] 刘晓东, 余立辉. 磁悬浮飞轮自动锁紧系统的研制[J]. 机械与电子, 2007(3): 33-36.
LIU Xiaodong, YU Lihui. Development of Automatic Locking System for Magnetic Bearing Flywheel[J]. Machinery and Electronics, 2007(3): 33-36. (in Chinese)
[9] 闫晓军, 张小勇. 形状记忆合金智能结构[M]. 北京: 科学出版社, 2015: 34-38.
YAN Xiaojun, ZHANG Xiaoyong. Shape Memory Alloy Intelligent Structure[M]. Beijing: Science Press, 2015: 34-38. (in Chinese)
[10] 曹乃亮, 董得义, 李志来. 基于形状记忆合金的空间分离装置研究进展[J]. 航天返回与遥感, 2014, 35(5): 9-18.
CAO Nailiang, DONG Deyi, LI Zhilai. Non-pyrotechnic Separation Devices Research Based on Shape Memory Alloy[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(5): 9-18. (in Chinese)
[11] 刘强, 房建成, 韩邦成, 等. 磁悬浮飞轮用可重复电磁锁紧装置的设计与试验[J]. 机械工程学报, 2012, 48(8): 12-20.
LIU Qiang, FANG Jiancheng, HAN Bangcheng, et al. Design and Experiment of Repeated Electromagnetic Locking Device for Magnetic Bearing Flywheel[J]. Journal of Mechanical Engineering, 2012, 48(8): 12-20. (in Chinese)
[12] 赵寒星, 兰鑫, 冷劲松. 形状记忆聚合物材料及其在航天器新型锁紧释放机构中的应用[J]. 材料科学与工艺, 2020, 28(3): 157-166.
ZHAO Hanxing, LAN Xin, LENG Jinsong. Shape Memory Polymer Materials and Their Applications in Releasing Devices of Spacecraft[J]. Materials Science and Technology, 2020, 28(3): 157-166. (in Chinese)
[13] 李相宇. 基于形状记忆复合材料的锁紧释放机构设计与试验研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
LI Xiangyu. Design and Experimental Study of Lock/release Structure Based on Shape Memory Composites[D]. Harbin: Harbin Institute of Technology, 2017. (in Chinese)
[14] 秦晓宇, 张小勇, 闫晓军, 等. 自锁式形状记忆合金馈源锁紧机构[J]. 宇航学报, 2016, 37(3): 357-363.
QIN Xiaoyu, ZHANG Xiaoyong, YAN Xiaojun, et al. An SMA-Actuated Locking Device for Feed Source Structure Based on Self-Locking Principle[J]. Journal of Astronautics, 2016, 37(3): 357-363. (in Chinese)
[15] 张家齐, 王爱华, 邓宁. 星载激光通信端机形状记忆合金锁紧机构研究[J]. 长春理工大学学报(自然科学版), 2017, 40(6): 1-5.
ZHANG Jiaqi, WANG Aihua, DENG Ning. Research on the Shape Memory Alloy Locking Mechanism of the Satellite Based on the Laser Communication Terminal[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2017, 40(6): 1-5. (in Chinese)
[16] RAZOV A I, CHERNIAVSKY A G. Applications of Shape Memory Alloys in Space Engineering: Past and Future[J]. European Space Agency, 1999, 20(4): 24-27.
[17] YOO Y I, JEONG J W, LIM J H, et al. Development of a Non-explosive Release Actuator Using Shape Memory Alloy Wire[J]. Review of Scientific Instruments, 2013, 84(1): 17-22.
[18] LUCIANO G, GALET G. Space Mechanism Actuated by a Shape Memory Alloy Component[C]//Sixth European Space Mechanisms and Tribology Symposium. Zürich, Switzerland: [s.n.], 1995: 221.
[19] YAN X, HUANG D, ZHANG X. A One-stage, High-load Capacity Separation Actuator Using Anti-friction Rollers and Redundant Shape Memory Alloy Wires[J]. Review of Scientific Instruments, 2015, 86(12): 153-11.
[20] GILMORE A, EVERNDEN B, ESTES L, et al. Space Shuttle Orbiter Structures & Mechanisms[C]//AIAA SPACE 2011 Conference & Exposition. California, US: [s.n.], 2011: 20-24.
[21] ENDO E, MITSUMA H, TANIGUCHI Y, et al. Berthing and Docking Mechanisms for Future Japanese Space Structures[C]//Aerospace Sciences Meeting. Reno, US: [s.n.], 2006: 50-54.
Design of the Locking Mechanism for a Space Large Aperture Scanning Device in Space
ZHAO Xin YU Tingting ZHAO Heng HE Dongke ZHANG Ning
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Due to the size limitation of infrared detectors, most infrared sensing cameras still use scanning devices to expand field of view. With the increase of camera aperture and detection field of view, the diameter of scanning mirror in the scanning device becomes larger and larger, and the bearing capacity of scanning mirror support elements also increases. According to the aperture and overload condition of the scanning mirror in a certain project, a locking mechanism with high bearing capacity, high stiffness, and repeatability is proposed, which can meet the overload force requirements of the supporting elements. The composition and working principle of the locking mechanism were described, and the bearing capacity and locking force of the locking mechanism were analyzed according to the overload requirements, and the mechanical simulation analysis was carried out according to the overload conditions. Finally, the vibration test was carried out, and the results show that the locking mechanism can safely lock the shafting of the scanning device.
infrared remote sensing camera; scanning device; locking mechanism; space remote sensing
V423.9
A
1009-8518(2023)01-0135-09
10.3969/j.issn.1009-8518.2023.01.015
2022-04-07
赵鑫, 于婷婷, 赵亨, 等. 一种空间用大口径扫描装置锁紧机构设计[J]. 航天返回与遥感, 2023, 44(1): 135-143.
ZHAO Xin, YU Tingting, ZHAO Heng, et al. Design of the Locking Mechanism for a Space Large Aperture Scanning Device in Space[J]. Spacecraft Recovery & Remote Sensing, 2023, 44(1): 135-143. (in Chinese)
赵鑫,男,1986年生,2010年7月获太原理工大学机械工程专业硕士学位,高级工程师。主要研究方向为空间光学遥感器高精度伺服机构结构设计及测试技术。E-mail:zhaoxsany@163.com。
(编辑:夏淑密)
