一类刚性负载双轴伺服系统的非线性观测器控制设计策略*
2023-03-18赵桂琛何建华章恩泽王保防
赵桂琛, 何建华, 章恩泽, 王保防
(1.青岛大学 自动化学院,山东 青岛 266071;2.扬州大学 信息工程学院,江苏 扬州 225009)
0 引 言
伺服系统又称随动系统,是一种能使负载位置等输出被控量随输入信号变化的自动控制系统[1-3]。随着科学技术的快速发展,大功率工业应用的出现对伺服系统提出了更高的要求。大功率交流伺服系统用于雷达和火炮,通常需要由多个电机同步驱动。在多电机伺服系统中,一些因素限制了系统跟踪性能的提高,包括电机特性的差异,系统参数扰动引起的温度和负载变化,负载惯性不确定性和扭矩扰动、摩擦以及非线性动态扭矩引起的齿槽效应,力矩、柔性传动机构引起的低频共振等。
摩擦是影响伺服系统性能的主要因素之一。为了提高系统的性能,可采用适当的摩擦补偿方法来减少或消除摩擦对伺服系统性能的影响。实际中,在处理摩擦问题时主要是基于摩擦模型进行补偿[4-5]。根据不同的情况,提出了多种摩擦模型用于建模和补偿。其中常用的模型有Dahl模型[6]、LuGre模型[7]、弹塑性模型[8]、Leuven模型[9]和GMS模型[10]。本文使用LuGre模型,因为其可以在低速摩擦动力学方面准确地描述摩擦现象[11]。
为了克服摩擦对系统的影响,许多学者提出了不同的补偿策略。文献[12]提出了一种基于多级坐标搜索算法的LuGre模型参数辨识方法,并设计了一个非线性摩擦观测器来估计LuGre模型不可测的内部状态。为了解决具有摩擦非线性伺服系统的控制问题,提出了一种改进的LuGre摩擦模型。径向基函数神经网络(RBFNN)因为具有通用逼近特性,所以可用来实现估计和补偿[13]。文献[1]提出了一种能够自适应地调整基函数的中心和宽度并在线逼近LuGre摩擦的控制器,并证明了该方法的有效性。文献[14]提出了一种新型的神经网络观测器来观测不易测的内部状态,并引入鲁棒自适应控制器实现高精度跟踪控制。
对于高阶非线性伺服系统,反步法被认为是一种设计高性能跟踪控制器的有效方法[15-17]。反步法广泛应用于非线性系统的控制,可以通过与自适应控制相结合来解决一大类不确定非线性系统的控制问题。然而,在控制器设计过程中,需要反复地对虚拟控制信号进行求导。随着系统复杂性的增加,会出现“微分爆炸”现象,导致控制器设计过程变得更加繁琐。针对反步法计算复杂的问题,国内外许多学者提出了大量的解决方法。其中,典型的技术方法有动态面技术[18-20]和命令滤波技术[21-23]。
本文研究了基于LuGre摩擦模型的双电机伺服系统自适应反步控制方法,并应用了非线性摩擦观测器和命令滤波技术。其中非线性观测器用于摩擦的估计和补偿,命令滤波器用于处理反步法的虚拟控制信号,避免了反复求导引起的复杂性问题,并使用误差补偿方程来减小滤波误差。为了保证同步性能,设计了速度同步反馈信号。最后,利用李雅普诺夫理论证明系统的稳定性。
1 问题描述与系统建模
在双电机伺服系统中,两台电机通过减速器、小齿轮和大齿圈一起带动旋转负载。双电机同步驱动伺服系统的机械架构示意图如图1所示[24]。

图1 双电机同步驱动伺服系统结构图
忽略齿隙的影响,双电机同步驱动伺服系统理想模型为

(1)
式中:下标j为不同的组,j=1,2;θj、ωj、Jmj、KTj、Kej分别为负载和电机的角位置、角速度、惯量、电磁转矩常数、反电动势常数;ij、Rj、Lj、uj分别为各电机的电流、电阻、电感、控制电压;KL为传动机构的刚度系数;θL、ωL、JL分别为转换到电机侧的负载的角位置、角速度、转动惯量;bj为常数;Tf为LuGre摩擦模型建立的摩擦力矩。
Tf的数学表达式如下:

(2)

(3)
σ0g(ωL)=FC+(FS-FC)e-(ωL/ωs)2
(4)
式中:σ0为摩擦刚性系数;σ1为摩擦阻尼系数;σ2为黏性摩擦系数;FC为库仑摩擦力矩;FS为静摩擦力矩;ωS为Stribeck速度;z为摩擦状态;g(ωL)为刷毛在两个接触面之间的平均挠度,是一个大于0且有界的函数。
双电机伺服系统的控制方法如图2所示。

图2 双电机伺服驱动控制方案
定义状态变量:x1=θLθ*、x2=ωL、x3j=θj、x4j=ωj、x5j=ij,可得状态方程为
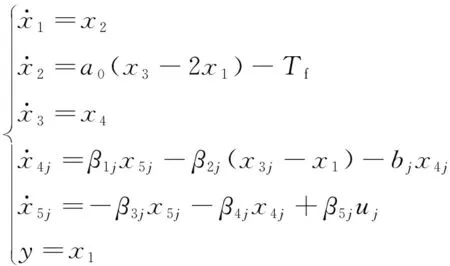
(5)
式中:a0=KL/JL,β1j=KTj/Jmj,β2j=KL/Jmj,β3j=Rj/Lj,β4j=Kej/Lj,β5j=1/Lj;x3=x31+x32、x4=x41+x42。
对式(5)所示系统做如下假设:
注1控制目标是在Lugre摩擦模型的基础上设计控制信号u1和u2,以减小摩擦转矩的影响,保证两台电机同步运行,并保证y能够稳定跟踪预期信号yd。
注2双电机伺服系统有两个控制输入信号。分别考虑各电机的输入时,系统仍然满足严格反馈形式,满足反步法设计的要求。
引理1命令滤波器定义如下[25]:

(6)

2 控制器设计
本节设计了一种基于双观测器的命令滤波器自适应反步跟踪控制器,用于具有Lugre摩擦的双电机伺服系统。假设系统的状态跟踪误差为

(7)
式中:x2,c、x3,c、x4,c、x5j,c分别为x2、x3、x4、x5j的期望虚拟控制信号;x4,c/2为状态x4j的期望虚拟控制信号;es和et分别为两台电机的转速差和驱动转矩均衡误差。
注3所提出的控制器由非线性摩擦观测器、命令滤波器、滤波误差补偿系统和双电机伺服系统组成。其中,将命令滤波器应用于虚拟控制信号,解决了复杂的计算爆炸问题。利用滤波误差补偿方程,提高了系统的滤波精度和跟踪精度。该观测器用于非线性摩擦的估计和补偿。最后,利用李雅普诺夫理论设计了整体控制器,并证明了其稳定性。
第一步,定义补偿后的跟踪误差为v1=e1-ζ1,考虑Lyapunov函数为

(8)
将式(5)与式(7)相结合,V1的时间导数为

(9)
构造虚拟控制律α1和补偿信号ζ1为

(10)

(11)
将式 (10)、式(11)代入式(9)可得:

(12)
第二步,考虑非线性状态z不可测,使用两个状态观测器估计状态z[26]:

(13)

观测摩擦力矩定义如下:

(14)

定义:

(15)

(16)
所以有:
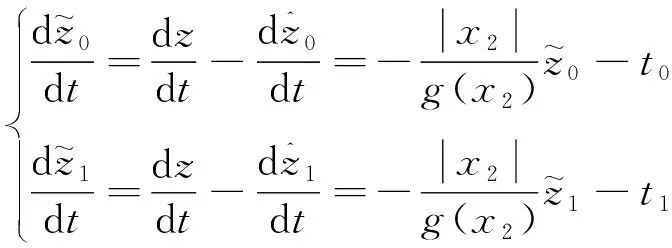
(17)

(18)
同样,将补偿后的跟踪误差定义为v2=e2-ζ2。选择Lyapunov函数:

(19)
式中:γ0、γ1、γ2为大于0的常数。

(20)
构造虚拟控制律α2和补偿信号ζ2分别为

(21)

(22)
将式(21)和式(22)代入(20),可以获得:

(23)
根据式(23),得到以下更新定律:

(24)

(25)
因此可以得到:

(26)
第三步,补偿信号为v3=e3-ζ3。选择Lyapunov函数为

(27)
V3的导数为

(28)
同样,构造虚拟控制律α3、补偿信号ζ3为

(29)

(30)
将式(29)和式(30)代入式(28),可以得到:

(31)
第四步,类似地,定义v4=e4-ζ4,选择以下Lyapunov函数:

(32)
V4的导数为
α41-a0β21(x31-x1)-a0b1x41+
e52+(x52,c-α42)+α42-

(33)
构造虚拟控制律α4j和补偿信号ζ4为
α4j=a0β2j(x3j-x1)+a0bjx4j+

(34)

(35)
将式(34)和式(35)代入式(33),可以得到:

(36)
第五步,类似地,定义v5=e5-ζ5,选择Lyapunov函数如下:

(37)
V5的导数为
a0β11β41x41+a0β11β51u1-

(38)
根据需要构造控制信号u1、u2和补偿信号ζ5如下所示:

(39)

(40)


(41)
3 稳定性分析


(42)

定理对于可由式(1)中描述的双电机伺服系统,设计了控制器式(39)、命令滤波器式(6)、滤波补偿子系统和非线性摩擦观测器式(17)。在这些条件下,闭环控制系统的跟踪误差将收敛到原点的一个足够小的邻域,并且系统的所有状态均是有界的。
证明:
Lyapunov函数将整个系统定义为

(43)
V的时间导数为

(44)
(x52,c-α42)-(x51,c-α41)
(45)
由引理1得|(x52,c-α42)-(x51,c-α41)|≤ε和ε>0,则式(45)可表示为

(46)

(47)
将式(46)和式(47)代入式(44)可得:

(48)
定义:

(49)

(50)
可得:

(51)
对于任意的t≤t0,存在:

(52)
根据引理2,可以看到负载位置跟踪误差收敛到原点附近足够小的邻域。
所设计控制器主要优势在于通过命令滤波器降低了控制器的计算复杂度,此外,结合同步反馈信号进一步提高两个电机之间的同步性能。然而,稳定性证明最后的结论仅能得到实用稳定性的结果,即所有系统状态均是有界稳定的。
4 试验分析
双电机伺服系统进行了对比试验,比较了PI控制和基于观测器的命令滤波自适应反步控制OCFABC方法下的双电机伺服系统运行性能。负载位置施加正弦信号和斜坡信号。
试验所用电机型号为科尔摩根B-402-B,惯量为0.000 323 kg·m2,电动势常数为0.64 V·s/rad,转矩常数为1.11 N·m/A。控制器参数[c1c2…c5]分别为[500 1 500 100 200 10],同步反馈控制参数[kskc]=[1 1.5]。
试验系统结构如图3所示。

图3 双电机试验平台


图4 位置跟踪误差1
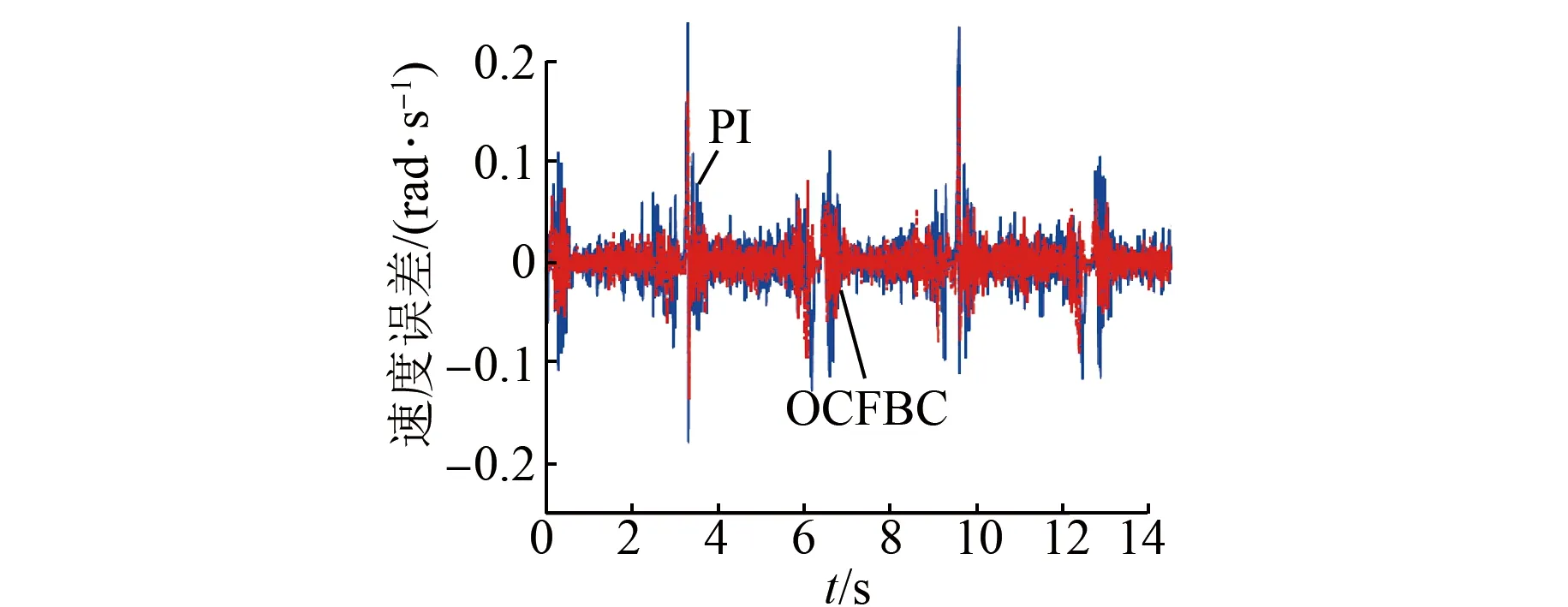
图5 速度同步误差1


图6 位置跟踪误差2

图7 速度同步误差2
试验结果如图4~图7所示。图4和图6给出了两种控制方法的位置跟踪误差。图5和图7显示了两种控制方法的同步误差。从图4~图7可以看出,OCFABC的位置误差和同步误差均小于PI控制。因此,通过试验可以得出OCFABC具有更好的跟踪性能和同步性能。
5 结 语
本文针对具有LuGre摩擦的双电机伺服系统,构造了一种基于观测器的命令滤波自适应反步控制器。该控制器中的观测器用于观测和摩擦补偿,并与命令滤波技术相结合,避免了反步控制设计过程中的“计算爆炸”问题,并在两个电机同步时实现了良好的跟踪性能。与其他方法相比,试验结果验证了该控制方法的有效性以及良好的跟踪和同步性能。本文研究的双电机同步伺服系统控制策略仍处于理论研究与试验验证阶段,将所设计的控制策略应用在实际的多电机驱动及伺服系统中,是未来的重点研究内容。
