基于非奇异终端滑模观测器的无刷直流电机无传感器控制*
2023-03-18李迎杰刘曙光刘旭东
李迎杰, 刘曙光, 刘旭东
(1.青岛大学 自动化学院,山东 青岛 266071;2. 山东鲁软数字科技有限公司,山东 济南 250000)
0 引 言
无刷直流电机(BLDCM)以其功率密度高,输出转矩大,控制简单等优点在航空航天、国防、电动汽车、制动器等领域运用广泛[1-4]。安装在电机上的霍尔传感器能有效估计电机反电动势信号,进而得到电机转速信息,但霍尔传感器的安装会增大电机的体积,且系统性能容易受工作环境复杂性以及安装精确性的影响。因此,BLDCM无位置传感器控制技术成为研究的热点之一[5]。
国内外学者对BLDCM无传感器控制做了大量研究,已知的主要控制方法有:反电动势法、电感法、反电动势积分法、磁链法、三次谐波法、续流二极管法以及滑模观测器等[6-10]。其中,滑模观测器因其无需额外硬件设计,参数调定方便,对负载扰动不敏感等优点受到广泛关注。文献[11]使用Sigmoid 函数代替传统的切换函数,获得线反电动势信号,得到线反电动势过零点即电机换相点,并推算出电机换相逻辑。文献[12]针对传统滑模观测器(SMO)存在的抖振现象,设计了一种新型指数型自适应滑模观测器,削弱了系统抖振,同时也降低了反电动势谐波分量。文献[13]提出了一种基于宽速度范围自适应滑模观测器的BLDCM无传感器控制方法,提高了反电动势的估计精度。文献[14]针对无传感器控制系统鲁棒性差,以及观测器输出误差等问题,提出了一种积分滑模观测器,有效增强了跟踪性能和鲁棒性。为了抑制滑模抖振,文献[15]设计了一种全阶滑模观测器,该方法运行稳定,具有良好的转速观测精度与动态性能。文献[16]提出了一种全局快速终端滑模观测器估计转子位置,该观测器具有全局快速收敛性和较好的跟踪精度。
为削弱传统滑模观测器的抖振现象,本文提出了一种新的非奇异终端滑模观测器(NTSMO)方法,设计的非奇异终端滑模面能够实现有限时间快速收敛,并通过引入一种新型趋近律,有效地抑制了滑模的固有抖振,提高了线反电动势的估计精度,利用Lyapunov稳定性判据对NTSMO进行稳定性分析。最后,通过仿真分析,证明所提策略存在的优势。
1 BLDCM数学模型
图1为理想状态下,BLDCM系统的等效模型如图1所示[17]。其中,T1~T6为功率器件。

图1 BLDCM系统等效模型
BLDCM的电压方程可表示为

(1)
式中:ua、ub、uc为三相绕组定子电压;ia、ib、ic为三相定子电流;ea、eb、ec为三相反电动势;R为定子电阻;L为定子各项绕组自感;M为每两相绕组间的互感。
根据式(1)可得BLDCM线电压模型:

(2)
式中:eab、ebc为电机的线反电动势,eab=ea-eb、ebc=eb-ec;uab、ubc为线电压,uab=ua-ub、ubc=ub-uc;iab、ibc为相电流差,iab=ia-ib、ibc=ib-ic;Ls为等效电感,Ls=L-M。
当系统的采样周期比机械和电气时间参数小很多时,线反电动势的导数为0[18]。
2 传统滑模观测器设计
取系统状态变量为iab、ibc,则式(2)可表示为

(3)
输出方程为

(4)

根据滑模观测器设计原理,定义滑模面为

(5)

根据式(5),传统滑模观测器[19]通常设计为

(6)

3 新型NTSMO设计
在传统滑模观测器的设计中,符号函数的不连续特性容易造成系统抖振,进而影响反电动势的观测精度,造成转速估计不准确。为此,本文提出了一种新型NTSMO,并通过引入一种新的滑模趋近律,提高了反电动势观测精度。新型滑模观测器设计为
(7)
式中:v为滑模控制律。
由式(3)和式(7)可得定子电流误差方程:

(8)

将式(8)展开可得:

(9)

为了实现系统状态在有限时间内收敛,设计非奇异终端滑模面为

(10)



(11)
式中:0<λ<1。
系统从初始状态到达平衡状态的时间tf为

(12)
因此,不等式(11)和式(12)表示系统状态能实现有限时间内的快速收敛。

(13)
可变换为

(14)
滑模控制律通常由等效控制veq和切换控制vn组成。等效控制以控制系统的确定部分,将系统状态保持在滑模面上,切换控制则使系统状态在滑模面上切换。针对式(9)电流误差系统,选取滑模面式(10),设计如下控制律:

(15)
式中:vn为滑模趋近律[21],0<η<1,r>0,μ>0,0<α<1,k、ε>0。
选取Lyapunov函数:

(16)
对V求导,并将式(15)代入得:

(17)

根据电机转速与线反电动势最大值的关系,可得电机转速为

(18)
式中:Em为线反电动势最大值;ke为反电动势系数;n为电机转速。
4 基于线反电动势的换相策略



表1 BLDCM换相逻辑
5 仿真结果与分析
为验证提出方法的有效性,采用MATLAB/Simulink分别建立了基于传统滑模观测器与新型NTSMO的BLDCM无速度传感器控制系统仿真模型如图2所示。电机参数如表2所示。其中所设计的新型NTSMO参数为,k=175 000,η=0.001,r=0.5,μ=3,α=0.5,ε=1,γ1=10,γ2=0.1,λ=0.6。

表2 BLDCM相关参数

图2 系统框图
5.1 空载起动性能
在电机空载起动阶段,给定转速为1 000 r/min,给定仿真时间为0.5 s,图3和图4为两种方法对应的电机转速响应曲线。从图4中可以看出,采用NTSMO方法的电机转速稳态性能更好,曲线更加平滑。
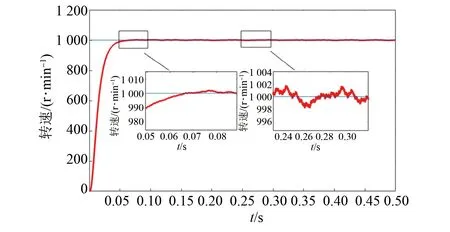
图3 传统SMO空载转速曲线

图4 NTSMO空载转速曲线
5.2 抗扰动性能
给定转速为1 000 r/min,在0.2 s时突加5 N·m负载,图5和图6分别是突加负载前后传统SMO和NTSMO输出的线反电动势曲线。由图5可以看出,传统SMO在加载前后,其观测到的线反电动势抖振较大,相电流波形存在较明显的畸变,稳定性较差。NTSMO观测到的线反电动势较为平滑,带载前后的抖振较平缓,通过仿真验证所提方法具有良好的动态性能和抗扰动性。

图5 传统SMO线反电动势曲线

图6 NTSMO线反电动势曲线
5.3 低速性能
给定转速为200 r/min,图7为传统SMO观测到的线反电动势曲线,低速时,线反电动势抖振较大,稳定性较差,直接影响线反电动势过零点的判定。图8为NTSMO观测的线反电动势,可以明显看出,线反电动势曲线更加平滑,抖振较小,观测精度较高,能准确输出过零信号。

图7 转速200 r/min的传统SMO线反电动势曲线

图8 转速200 r/min的NTSMO反电动势曲线
图9和图10给定转速为200 r/min时的转速响应曲线,其中采用传统SMO方法系统抖振大,低速性能差。而基于NTSMO方法得到的转速响应曲线稳定时间较短,抖振小,在低速时也具有良好的性能。

图9 转速200 r/min的传统SMO转速曲线

图10 转速200 r/min的NTSMO转速曲线
图11为给定转速由200 r/min切换至1 000 r/min时,采用传统SMO和NTSMO方法得到的转速切换响应曲线,可以明显看出,NTSMO方法转速切换更为平滑,抖振较小,稳定性较好。

图11 传统SMO和NTSMO转速切换响应曲线
6 结 语
本文提出了一种基于NTSMO的BLDCM无传感器控制方法,设计了非奇异终端滑模面,并引入了一种新的滑模趋近律,对比传统滑模观测器本文提出的策略有如下优点:
(1) 抑制了传统滑模观测器中的抖振现象,加快了滑模收敛速度。
(2) 改善了传统滑模观测器观测精度低的弊端,能够准确地跟踪给定转速。
(3) 在中低速时均可获得平滑的线反电动势观测信号,减小了线反电动势观测误差,提高了BLDCM无位置控制系统的性能。
