老年人智能防摔腰带设计*
2023-03-18王宇轩李铁林叶斌斌徐梓豪蔡金洋
王宇轩 李铁林 叶斌斌 徐梓豪 蔡金洋
台州职业技术学院 浙江 台州 318000
引言
随着老龄化社会的到来,针对老年人的健康与养老问题显得日益重要。其中一个不可避免的话题就是老年人的摔倒现象。老年人因神经反应变慢和肌肉量萎缩等原因,身体的平衡能力逐年下降,摔倒的风险随之加大。据统计,我国每年大约有5000万的老年人会发生摔倒事故。老年人摔倒后,轻则造成软组织挫伤、骨折,重则直接死亡[1]。此外,后续的治疗与陪护也给其家庭带来较大的经济压力与时间负担。因此,如何降低老年人摔倒带来的不利影响,不仅关系到老年人的晚年生活质量,也涉及广大家庭的切身利益。
针对上述问题,本文设计了一种便于老人穿戴的智能防摔腰带。该腰带在外观上与普通腰带类似,但在腰带内部嵌入了六轴传感器可感知老人的身体姿态,能检测出老人即将摔倒的状态,同时及时释放气囊,在老人的髋关节四周形成缓冲保护带,以降低摔倒时地面对身体的冲击。
1 总体架构设计
本文所设计的老年人智能防摔腰带主要由控制模块、检测模块、执行模块、无线数据传输模块和电池模块组成。其中,控制模块是整个腰带设备的核心模块,负责检测数据的运算处理、保护气囊的执行触发、报警信息的指令发送等工作;检测模块的加速度传感器和倾角传感器负责收集人体的运动状态与身体姿态,并将数据传回控制模块以便判断人体是否会发生摔倒;执行模块中的高压储气瓶里的压缩气体用于在跌倒过程中快速填充气囊,以形成缓冲保护带[2-3];无线数据传输模块将在检测到人体摔倒后发送短信数据至老年人家属的手机,以便在第一时间开展救助;电池模块负责给控制模块、检测模块和无线数据传输模块提供电源。该智能防摔腰带的具体设计总体架构如图1所示。
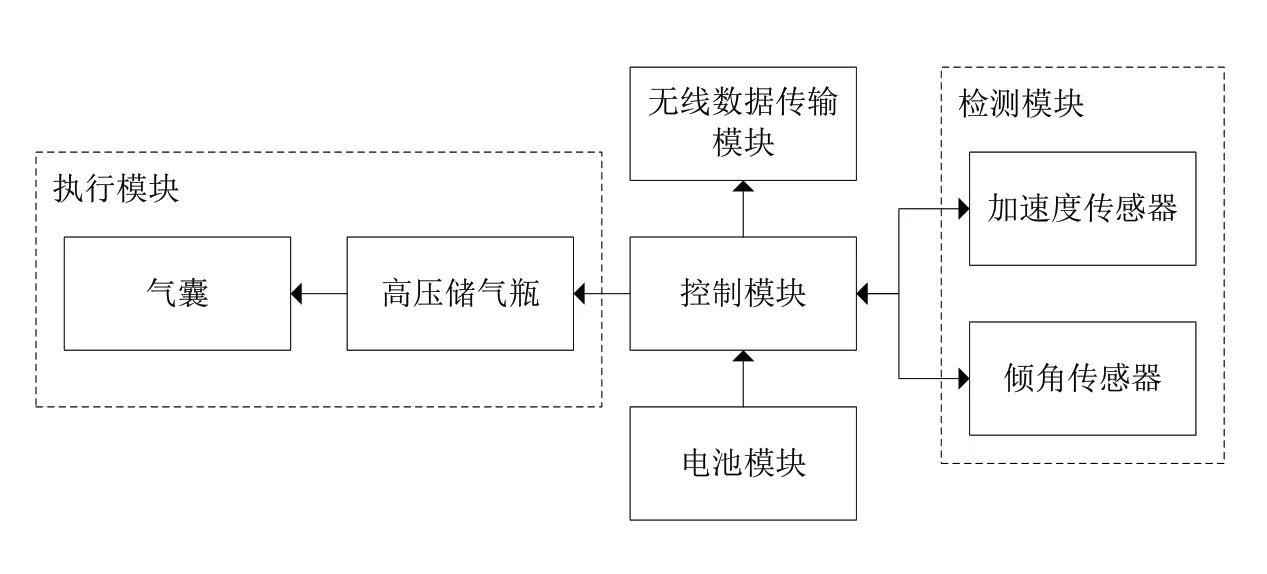
图1 老年人智能防摔腰带总体设计架构
在腰带设备正常运行时,检测模块将不间断地获取佩戴者的加速度信息和倾角信息,并将该数据传输至控制模块。控制模块根据获取的人体加速度和倾角数据分析腰带佩戴者发生摔倒的可能性。当判断即将摔倒时,控制模块触发高压储气瓶的开启。高压储气瓶的压缩气体通过导气管快速充满隐藏在腰带内的气囊并弹出,在人体髋关节四周形成缓冲保护带。同时控制模块唤醒平时处于休眠状态的无线数据传输模块,通过短信发送摔倒报警信息到指定的老年人家属手机上,以便家属第一时间进行救助。
2 硬件设计
控制模块的主芯片选择基于Cortex-M4内核的STM32F407VET6芯片,采用DSP单周期指令,工作频率为168MHz,能够满足实现姿态实时检测与摔倒主动防护所的数据快速读取及处理的应用要求。该芯片内嵌512KB的Flash和4KB的SRAM,存储容量足以存储检测程序以及摔倒监测过程中的临时数据。整个芯片采用LQFP形式封装,体积小、功耗低,适用于集成在腰带中。
加速度传感器采用MPU6050芯片,通过I2C端口与控制模块进行三轴加速度数据的传输,其频率可高达400kHz,完全满足对人体运动数据的采样要求。芯片内含数字运动处理引擎和16位AD转换器,可减少控制模块对运动数据的处理负荷,为后续气囊释放留有足够时间。其工作电流为350μA,有利于增加设备充满电后的检测工作时长。在具体应用时,加速度检测范围可通过程序选定为±8g,数据采用四元数输出格式。倾角传感器选用SCMA800芯片。该芯片体积小、功耗低,其倾斜角度分辨率达0.1°,可通过波特率为9600bps的UART串口向控制芯片传输读取的倾角信息,满足摔倒检测的精度要求和时间响应要求。
无线数据传输模块采用SIM900A芯片,包含串口电路、SIM卡电路和GSM天线。串口电路用于跟控制模块的通讯,采用TVS和磁珠保护器件对PCB板进行保护,防止其收到浪涌和高电压的伤害。SIM卡电路用于短信的发送,并增加SMF05C芯片以释放电路中可能存在的静电。GSM天线应保证短且直,以增强信号强度。该模块可用5V直流电源供电,休眠模式下的电流为10mA左右。
高压气瓶用于储存经高压压缩后的气体,以供气囊快速展开时使用。经测试,10L的充气量可在60ms内完成充气过程。气体采用对人体无毒性且易制备的二氧化碳。高压气瓶通过导气管与气囊相连通。气囊采用高韧性尼龙织物制成,在不充气时压缩折叠在腰带的左右两侧。在气囊上设有多根牵引带,充气时在牵引带的作用下,左右气囊快速展开,形成扁平状环绕在人体髋关节进行保护。
电源模块在设计时应注意电源余量保留和电源纹波抑制两个方面。根据上述硬件配置,电源容量在30000mAh以上可保证设备充满电后一星期内的正常运行。电源纹波可借助LDO(Low Drop Outregulator)电路进行抑制,其输入和输出的对地并联电解电容容量选择为100uF以上。此外,还需在大电容旁边并联一个0.1uF的陶瓷电容,以保证电源的高频响应能力。
3 软件设计
3.1 数据预处理
通常人体在活动时产生的频率都在20Hz之内[4],但实际上硬件获取的人体运动信息都包含一部分噪声,使得原始数据存在毛刺。为了提高摔倒预测算法的准确性,在进行摔倒预判之前需要先滤除掉信号中的高频噪声。考虑到算法的实时响应要求以及硬件实现的难易程度,本设计采用递推平均滤波算法,即每时刻的数据值为前几个时刻到当前时刻到的平均值。易知,当参与运算的时刻个数越多,数据平滑滤波的效果越强。同时,当递推的个数较多时,也会造成波形的失真。经测试,当两个时刻数据参与递推平均滤波算法时效果较好。
3.2 摔倒预测算法
现阶段对于摔倒的预测方法,常用的有机器学习算法和阈值算法。机器学习算法从所获得的数据中选取特征值进行学习,并完成分类器的训练,从而实现数据的有效分类。但由于机器学习算法需要较复杂的软件框架,运算量较大,在可穿戴的嵌入式设备中更适合应用运算量小、反应快的阈值算法。
本设计的阈值算法主要综合两个指标对人体是否即将摔倒做出判断,分别是合成加速度和倾斜角。其中,合成加速度指的是三轴加速度的矢量和;倾斜角指的是x、y两轴旋转角与z轴(竖直方向)所形成的合成角度。
通过对比人体正常行走和摔倒全过程的运动学数据,可以发现人体在摔倒的过程中会经历摔倒失重到落地超重的特殊阶段。其中,失重阶段的合成加速度在0.3~1g之间,持续约0.6s;超重阶段的合成加速度将超过2g,持续0.4s左右。而人在正常行走及爬楼梯时的合成加速度呈现以1g为基准、上下周期性波动的特征,最高峰值不超过2g,最低谷值不低于0.5g。因此,在预判摔倒时可将合成加速度设置得比最低谷值略高一点,比如0.7g。之所以没有把谷值作为判断的阈值,是因为这样设置将造成摔倒预判的敏感度降低,即实际将摔倒但设备未认定为摔倒的情况发生,使得气囊打开时间不够或者根本未打开,从而不能起到保护作用。但这样设计带来的一个后果就是摔倒的误判率会上升,故通过另一个指标进行限定,即该时刻的倾斜角,本设计中将45°作为倾斜角的阈值。整个摔倒预测算法的流程是,先判断合成加速度大小是否低于加速度阈值;如果是,再判断当下的倾斜角是否大于倾斜角阈值;如果也是,则预判即将摔倒,立刻触发压缩气瓶开启,释放气体以充满气囊。
在实际应用时,每个人的动作状态会存在一定差异,因此加速度阈值的设定需因人而异。具体的处理办法是,在首次佩戴使用该防摔腰带时,先让使用者以正常姿态行走一小段距离以获得其运动学基准数据。本设计采用多出其谷值的35%作为合成加速度的阈值,且限定在0.5~0.8g。
3.3 报警短信发送
负责短信发送的无线数据传输模块在大部分情况下处于休眠状态以节省电量消耗。当判断为摔倒后,控制模块唤醒无线数据传输模块进入工作模式。对无线数据传输模块的程序控制主要是通过AT指令来实现。控制模块通过“AT+CMGF=1 CR LF”命令将无线数据传输模块设置成Text收发模式,并借助“AT+CMGS”命令确定接收报警短消息的手机号码,最后在发送消息的后面添加0x1A表示结尾,即可把摔倒的报警信息发送到指定家属的手机上。
4 结束语
综上所述,文章提出一种老年人智能防摔腰带的设计。此设计中主要包含硬件和软件两部分的设计内容。其中,硬件部分介绍了组成智能防摔腰带的关键模块,重点解释了各模块特点及参数选择的原因;软件部分则分别阐述了实现原始数据处理、摔倒预判算法和报警短信发送的实现思路。文中所述的老年人智能防摔腰带设计架构可为后续防摔设备的研发提供参考。
