船载磁探测器任意航向实时抗干扰技术研究
2023-03-17李志新
李志新
应用研究
船载磁探测器任意航向实时抗干扰技术研究
李志新
(海军工程大学电气工程学院,武汉 430033)
船载磁探测器测得的磁场信号中,除期望的船舶坐标系下的地磁场信号外,还包含多种干扰磁场信号,需进行抗干扰才能满足测磁要求。本文在分析各种干扰磁场信号特性及其排除方法的基础上,对任意航向上的三分量实时抗干扰技术进行了理论建模、算法实现以及工程适用性等研究,并通过MATLAB仿真验证该技术的可行性。该技术可使船载磁探测器的抗干扰摆脱时间、地点的限制,有效地解决船舶固定干扰磁场的实时排除,船舶固定磁场变化的实时监测等难题。
磁通门测磁仪 任意航向 感应磁场 固定磁场 实时抗干扰
0 引言
某些船舶在桅杆上安装三分量磁通门磁探测器,如图1所示,测量船舶坐标系下地磁场的3个分量[1],用以控制线圈电流的输出,补偿船舶感应磁场。要保证感应磁场的补偿精度,保证磁探测器测量地磁场的准确度是基础。
磁探测器安装在船舶桅杆上,其测量信号包括需要的控制线圈电流所需的地磁场信号,也包含船体的固定磁场、感应磁场以及线圈通电产生的磁场等干扰磁场信号,需进行抗干扰调整,才能保证磁场测量的准确性,保证线圈电流的准确性,使其满足设计要求[1]。
当前船载磁探测器在四个主航向上的抗干扰方法,要求船舶在特定的时机、特定的水域做转圈航行,并采集磁东、南、西、北四个主航向上的数据,这就极大地限制了抗干扰调整的便捷性,使得抗干扰需在特定的时间特定的地点进行,不能对各类干扰量,尤其是船舶固定磁场的变化做出及时做出反应,难以保证抗干扰精度[2-4]。为此,本文对船载磁探测器的任意航向实时抗干扰技术进行了研究。

图1 船用磁探测器
1 磁探测器测量信号组成
安装在船舶桅杆上的磁探测器测量到的磁场信号包括地磁场、船舶感应磁场、线圈磁场、船舶固定磁场四类信号,如式(1)所示



略去二阶以上小项



将式(4)代入式(5)可得探头坐标系下感应磁场

可见磁传感器和磁探测器的安装带来的误差与感应磁场干扰有相同的形式,二者在式(6)中合为一体[5-7]。
线圈磁场与线圈电流成正比,且由于线圈非特殊情况不会改变,比例系数在出厂时测定后,可视为不变[1],故线圈干扰磁场排除简单,在本文中将其忽略。
固定磁场在两次抗干扰期间可视为不变,所以磁探测器接收到的磁场信号为(不计绕组磁场)




2 任意航向三分量实时抗干扰方法分析
四航向抗干扰方法需在特定的时间、地点进行,这就决定了两次抗干扰之间的时间往往很长(一年以上),期间船舶固定磁场逐渐发生变化,磁场数据采集处理设备不能及时应对这个变化,从而未能保证磁场数据的准确性,进而影响补偿电流的精度。


3 三分量干扰系数及固定磁场简化计算方法
1)求水平干扰系数
仅考虑水平干扰系数时,方程还有3个未知数,取三个状态进行求解

X方向受到的水平方向干扰

Y方向受到的水平方向干扰

Z方向受到的水平方向干扰

2)求垂向干扰系数
取姿态角度变化较大的两组数据,并利用第①步求得的水平干扰系数进行求取
X方向受到的垂直方向干扰

Y方向受到的垂直方向干扰

Z方向受到的垂直方向干扰


完成垂向干扰系数的第一次求取,然后将所有系数与预期进行比较,若满足要求则结束计算,若不满足要求,则回到第一步,重新开始计算,直至数据满足要求。
第二步的计算中,分母为两个状态下的垂向地磁场之差,即需要改变作用在船舶上的垂向地磁场,以求取垂向干扰系数,这就需要改变船舶的纵倾、横摇角,船舶实现横摇比实现纵摇容易,故选取横摇角差别较大的数据为第4、第5组数据。

图2 干扰系数求解示意图
4 任意航向三分量抗干扰仿真
假设某船舶磁探测器感应干扰系数为

固定干扰磁场(单位nT)


与设定值的最大差值为0.0035,在全球范围内会带来最大238nT的计算误差。求得的固定干扰磁场值为
与设定值的最大差值为127 nT。即干扰系数和固定干扰磁场误差将导致的最大磁场计算误差为365 nT,将导致线圈电流的最大误差为0.54%,远高于3%的抗干扰要求。
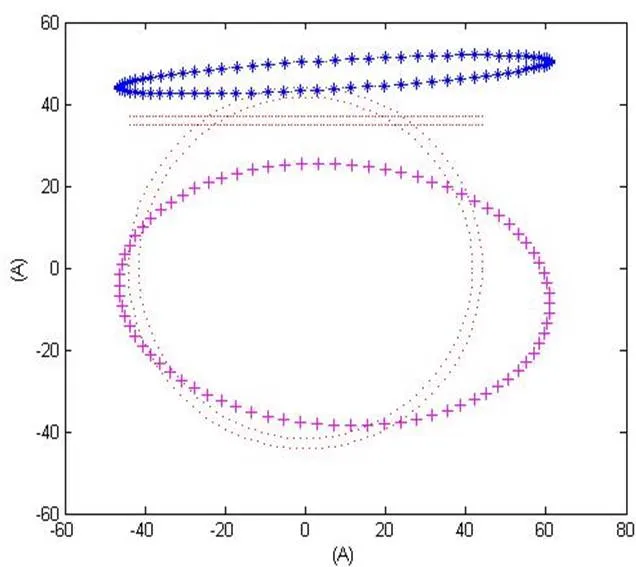
图3 不进行抗干扰调整时的线圈电流

图4 三分量抗干扰调整后的线圈电流
5 小结
理论分析和仿真表明,在采集船载磁探测器磁场数据的同时,实时采集船舶的经度、纬度、航向、纵摇、横摇等信息,可实现在任意位置、任意航向对船舶上的磁探测器进行三分量实时抗干扰调整,克服以往抗干扰对地点、时机要求苛刻的缺点。在任何需要的时候进行抗干扰调整,可真正做到实时排除各类干扰量,尤其是船舶固定磁场的干扰,同时监测船舶固定磁场的变化,为固定磁场的补偿和其它相关操作提供参考。
本文仿真时取磁探测器测量误差5 nT,远大于当前船用磁探测器误差水平,5°的横摇角度差也很容易实现,故船载磁探测器实时任意航向三分量实时抗干扰是可行的。
[1] 李志新, 消磁与电场防护设备及控制[M]. 武汉: 海军工程大学, 2021.
[2] 田东, 刘胜道, 高俊吉. 消磁技术对舰船磁场特征的影响[J]. 船电技术, 2017, 37(03): 48-50.
[3] 朱世才, 牟兰, 刘志军, 王德庆. 国外舰船磁场特性研究及舰船防护技术综述[J]. 舰船科学技术, 2014, 36(09): 1-6.
[4] 衣军, 张朝阳. 磁强计式数控消磁系统电流控制技术[J]. 舰船科学技术, 2013, 35(10): 106-109.
[5] 韦春健, 史振宇. 德国海军消磁系统发展现状及应用[J]. 船电技术, 2013, 33(06): 36-38.
[6] 郑春强. 舰船消磁系统磁强计测试仪的设计[J]. 微计算机信息, 2012, 28(10): 202-203.
[7] 常宝林, 渐开旺, 张松勇. 基于磁强计的消磁电流控制仪研制[J]. 上海海事大学学报, 2012, 33(02):22-25.
[8] 闫辉, 肖昌汉. 一种海洋环境地磁场三分量的测量方法[J]. 海军工程大学学报, 2005(06): 80-83.
[9] 肖昌汉, 卢庆芳, 王智勇, 王潜. 舰船任意姿态下消磁系统电流变化关系[J]. 海军工程大学学报, 2002(01): 14-18.
[10] 肖昌汉, 何华辉. 三分量磁传感器非理想放置时磁场数据的分析方法[J]. 海军工程学院学报, 1996(03): 7-12.
[11] 高德章. 舰船消磁系统的磁场[C]. 中国地球物理学会. 1994年中国地球物理学会第十届学术年会论文集. 中国地球物理学会: 中国地球物理学会, 1994: 346.
Study of the ship’s magnetic detector real time anti-interference technology on arbitrary headings
Li Zhixin
(College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China )
U665
A
1003-4862(2023)02-0028-05
2022-03-21
李志新(1981-),男,硕士。研究方向为电工理论与新技术。E-mail: 01021332@163.com
