面向超宽带室内定位的FCM-SSGP 方法
2023-03-16张天骐
张 盛,唐 帆,张天骐,范 森
(1.重庆邮电大学 通信与信息工程学院,重庆 400065;2.清华大学 深圳国际研究生院,广东 深圳 518055)
0 概述
物联网技术的发展促进了基于位置服务的发展[1]。全球定位卫星(Global Positioning System,GPS)技术可以在室外获得较精准的位置信息,但由于GPS 信号无法穿透墙面以及多径效应,导致其无法应用于室内定位系统,因此需要寻找新技术用于室内定位。
目前已有诸多室内定位技术用于解决室内定位问 题,如蓝牙、Wi-Fi、ZigBee、超宽带(Ultra-Wideband,UWB)等。其中UWB 因具有高时间分辨率、抗多径效应、良好的穿墙特性、厘米级的定位精度[2]等优点在众多室内定位技术中脱颖而出。但室内的椅子、玻璃、木门、墙壁等物体可以阻挡并反射UWB信号,导致UWB 信号在非视距(Non-Line of Sight,NLOS)环境下传播[3]。利用该环境下的UWB 信号进行测距将产生一定的正偏差,且在NLOS 环境传播所产生的误差是UWB 定位系统的主要误差源[4]。因此,为了提高系统的定位精度,在进行距离或者位置信息计算前,应该对由NLOS 环境造成的误差进行校正或排除,从而得到相对精准的距离或者位置信息。
目前,针对提高NLOS 环境下的定位精度问题的解决方案主要分为两类。
第1 类解决方案是通过对视距(Line of Sight,LOS)信号以及NLOS 信号进行识别、分类,之后再降低NLOS 信号产生的测距误差,或直接弃用NLOS信号所产生的距离信息。对于识别NLOS 环境下的测距信息,通常通过检测信道冲击响应(Channel Impulse Response,CIR)以及相关评估参数[5]实 现UWB 信号的LOS/NLOS 分类。基于该思想的分类方法一般结合机器学习的方法,比如支持向量机[6]、多层感知机[7]、决策树[8]等方法。文献[9]采用最小二乘支持向量机(Least Squares Support Vector Machine,LS-SVM)分类器对NLOS 信号进行识别,再使用LS-SVM 回归器降低NLOS 测距误差,之后进行定位,有效提高了定位精度。文献[10]利用短时傅里叶变换处理CIR 数据,再通过卷积神经网络识别NLOS 信号,提升了识别性能,但识别所需时间过长。
第2 类解决方案是通过降低NLOS 的影响,估计NLOS 产生的偏差,从而提高测距和定位精度。文献[11]结合信道信息和几何精度稀释因子,提出一种等式约束泰勒级数鲁棒最小二乘位置估计技术,抑制NLOS 误差。文献[12]以信号传播路径损耗为切入点,推导出了在NLOS 环境下的距离误差方程,然后将其用于抑制NLOS 环境下的距离误差,然而使用该方法需要已知环境参数。随着机器学习的火热,非参数机器学习的方法也被应用于抑制NLOS环境的影响。文献[13]采用非参数回归技术估计测距误差,使用高斯过程回归(Gaussian Process Regression,GP),根据训练数据确定测距误差的后验分布,并利用其进行定位。使用高斯过程回归的方法无需在训练前对LOS 信号、NLOS 信号进行标记,且相比其他机器学习方法能更好地抑制NLOS误差[14]。此外,文献[15]采用深度学习中的长短期记忆(Long Short Term Memory,LSTM)网络抑制NLOS 误差,利用LSTM 学习不同NLOS 环境下CIR特征与测距误差的关系,在估计误差后进行定位,在NLOS 环境下达到了20 cm 的定位误差。尽管高斯过程回归和LSTM 网络均具有优秀性能,但抑制NLOS 误差的复杂度均过大,容易在实际定位系统中产生较大的定位延迟,不适用于实际的定位系统。文献[16]提出一种低复杂度的稀疏伪输入高斯过程(Sparse Pseudo-Input Gaussian Process,SPGP)方 法直接抑制LOS/NLOS 测距误差,并进行定位,虽然该方法降低了定位所需时间,但也降低了定位精度。
本文面向超宽带室内定位提出一种新的定位方法,通过先识别NLOS 信号再抑制NLOS 误差,提高定位精度,并降低定位时间。在传统的NLOS 信号识别基础上,针对障碍物的不同将NLOS 信号分为轻度NLOS 和一般NLOS,利用模糊C 均值(Fuzzy CMeans,FCM)聚类的隶属度作为后续抑制NLOS 误差的权重。在抑制NLOS 误差时,仅对NLOS 信号采用稀疏谱高斯过程回归[17](Sparse Spectrum Gaussian Process Regression,SSGP)方法抑制测距误差,减少计算复杂度和总定位时间。
1 NLOS 环境误差及特征分析
1.1 NLOS 环境下的测距误差
UWB 定位系统由位置已知的基站以及待估计位置的标签组成。在大多数环境下,UWB 测距均使用到达时间(Time of Arrival,TOA)[18]测距方法。该方法的基本思想是利用电磁波的传播速度乘以基站到标签的飞行时间,求得基站与标签间的距离。本文采用TOA 方法计算基站与标签之间的距离,将每个基站的测距模块测得的距离表示为,其中i是相应基站的编号。在实际测量中,使用TOA 方法计算基站与标签之间的距离不仅会受到芯片内部时钟偏移的影响,而且会受到外部环境的影响。如图1 所示,如果基站与标签之间存在障碍物,会使UWB 信号的传播环境变为NLOS 环境。
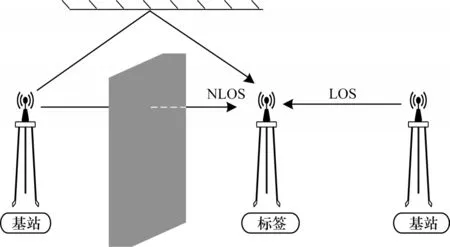
图1 LOS/NLOS 环境下的UWB 信号传播Fig.1 UWB signal propagation under LOS/NLOS environment
若UWB 信号是在NLOS 环境下传播的,将导致使用TOA 方法测距时首个接收信号被延迟,从而引入额外的传播时延并产生正偏差。该测距误差也会导致在估计标签位置时产生较大偏差。同理,如果基站与标签之间不存在障碍物,那么使用TOA 测距则不会引入这种额外误差。本文使用TOA 测距时,将产生的其他误差均考虑为其他噪声nother。综合考虑,本文将使用TOA 测距得到的距离信息表示为:
其中:di是标签到基站的真实距离;enlos是UWB 信号在NLOS 环境下传播而产生的NLOS 误差;nother是在LOS 环境下使用TOA 方法测距时因时钟偏移、多径传播等因素产生的噪声。测距误差表达式如式(2)所示:
图2 所示为基站与标签之间使用不同障碍物遮挡而形成的测距误差。
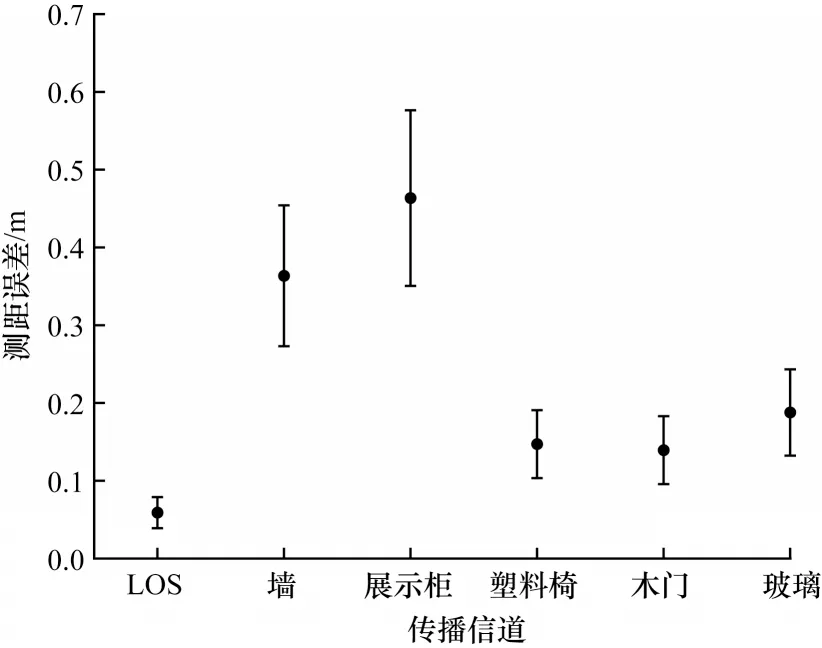
图2 不同传播信道下的测距误差Fig.2 Ranging errors under different propagation channels
由图2 可知,除了LOS 与NLOS 环境下的测距误差有明显不同,经不同障碍物形成的NLOS 传播信道下的测距误差也有明显差异。
1.2 LOS/NLOS 环境下的信号特征
UWB 信号在不同信道中传播时会产生不同特性的接收信号,且在传播过程中由于障碍物的阻塞和衰减会使CIR 信号存在较大差别[19]。图3 所示为LOS/NLOS 环境下的CIR 信号,可见LOS 与NLOS的CIR 信号波形存在明显不同。为量化LOS/NLOS环境下的CIR 信号差异,本文选取了不同的CIR 特征指标用于区分信号在不同传播信号的差异,具体如下所示。

图3 LOS/NLOS 环境下的CIR 信号差异Fig.3 Differences in CIR signal under LOS/NLOS environment
2)CIR 信号能量E[11],表达式如式(3)所示:
3)平均超额延时(Mean Excess Delay,MED)[20],用τMED表示,计算式如式(4)所示:
4)均方根时延扩展(Root-Mean-Square Delay Spread,RDS)[20],用τRMS表示,计算式如式(5)所示:
5)最大幅值[20],用rmax表示,计算式如式(6)所示:
6)峭度[21],用κ表示,计算式如式(7)所示:
其中:μ||h与σ||h分别是信道冲击响应h(t)取模后的均值和标准差。
图4 所示为UWB 信号在不同环境下不同CIR特征的累积分布函数(Cumulative Distribution Function,CDF)。由图4 可知,LOS 环境下的最大幅值以及能量均大于NLOS 环境下的最大幅值以及能量。且LOS 环境下的MED 和RDS 均小于NLOS 环境下的值。除此之外,不同NLOS 传播信道的各个特征也存在一定差异,比如使用墙以及展示柜做障碍物时的MED、RDS 大于其他NLOS 传播信道,且最大幅值及能量均小于其他NLOS 传播信道。由图2 可知,墙及展示柜障碍物形成NLOS 传播的测距误差也明显大于其他NLOS 传播的测距误差。当提供特定的NLOS 传播信道时,则可以提供更多距离误差的信息[11],从而有利于修正NLOS 测距误差。因此,本文将信道划分为LOS、轻度NLOS(如木门、椅子和玻璃)及一般NLOS(如墙和展示柜)3 种情况,并只抑制NLOS 测距误差。

图4 不同传播信道下不同CIR 特征的累积分布函数Fig.4 Cumulative distribution functions of different CIR characteristics under different propagation channels
2 FCM-SSGP 方法
本文使用基于SSGP 回归的方法抑制NLOS 带来的测距误差。由于使用回归方法修正测距误差会受训练样本的分布情况影响,因此本文首先使用FCM 识别NLOS,并将其划分为轻度NLOS 及一般NLOS,再使用SSGP 回归方法分别训练出2 个不同NLOS 条件下的测距误差模型,并将FCM 得到的隶属度作为权重进行NLOS 误差消除,最后利用消除误差后的测距值进行定位。FCM-SSGP 方法的流程如图5 所示。

图5 FCM-SSGP 方法的流程Fig.5 Procedure of FCM-SSGP method
2.1 FCM 聚类
设H={h1,h2,…,hL}是包含L条LOS/NLOS 的CIR 特征样本,其中h=[trise,E,τMED,τRMS,rmax,κ],FCM的目标函数如式(8)所示:
其中:U和V分别是隶属度矩阵和聚类中心矩阵;c是聚类簇数;uij是第i个样本hi的第j类隶属度,其计算式如式(9)所示;f∈[1,∞)是隶属度的权重因子;rij是第i个样本hi到第j个聚类中心的欧氏距离。
根据式(8)及式(9),使用拉格朗日数乘法可以得到聚类中心vi,如式(10)所示:
通过式(10)和式(11)迭代更新uij和vi,以获得最优的隶属度矩阵U和聚类中心矩阵V。根据U确定样本hi类别,即,hi属于第j类。
所选的CIR 特征在不同传播信道下会有重合现象,导致识别NLOS 时存在不确定性,不能完全区分不同的NLOS 信道。而FCM 中的隶属度矩阵U可以表示这种不确定度。因此利用隶属度矩阵U修正NLOS 信号的测距值,获得抑制NLOS 误差后的测距值,如式(12)所示:
其中:和分别是轻度NLOS 和一般NLOS 条件下使用SSGP 方法估计的测距误差;ul、us和un分别是样本h属于LOS、轻度NLOS 和一般NLOS 所对应的隶属度。
FCM 的计算复杂度为O(LpcT),p为样本的维数,T是迭代次数。
2.2 高斯过程回归
给定一组训练集D={(xi,εi)|i=1,2,…,N},该训练集含有N组NLOS 样本。定义所有输入向量X=[x1,x2,…,xN]⊤,以及与之对应的所有输出向 量ε=[ε1,ε2,…,εN]⊤。在权重视角下,GP 回归模型可以将输入输出的关系表示为[22]:
其中:n~N(0,) 是高斯分布的噪声;Φ=[ϕ(x1),ϕ(x2),…,ϕ(xN)],且ϕ(xi)是依赖于输入向量xi的基函数;w是权重参数向量。根据本文所使用的数据集可以得到:
现假设w是一个具有零均值且方差矩阵的高斯分布w~N(0,),作为w的先验信息。根据贝叶斯定理,w的后验分布中只有似然函数和先验概率依赖于权重w,所以w的后验分布存在如下关系[22]:
至此,得到了权重w的后验分布函数,利用最大后验估计可以得到w的估计值:
将代入式(13)中化简后,ε可以被估计如下:
其中:K=[k(x,x1),k(x,x2),…,k(x,xN)]是由核函数k(xi,xj)组成的向量,且k(xi,xj)=ϕ(xi)⊤ϕ(xj);Bi,j=。目前由于核函数未知,所以要确定的值,还需要确定合适的核函数。若选取如式(19)所示的多项式核函数:
则需要求解核函数中l、σk的值,结合前文定义θ=[l,σk,σn,σw],其中l、σk、σn、σw均为超参数。求解超参数的目标方程如下:
基于GP 方法求解超参数θ*主要取决于计算B的逆矩阵,求解所需要花费的计算复杂度为O(N3),空间复杂度为O(N2)。计算花费过高,在实际的定位系统中会增加定位时间,成为性能瓶颈。且过高的空间复杂度会提高对定位系统存储容量的要求,导致整个系统的成本增加。因此本文采用稀疏谱高斯过程抑制测距误差,降低计算复杂度。
2.3 稀疏谱高斯过程
假设训练样本是具有平稳协方差函数的高斯过程,并且对于平稳高斯过程存在如式(21)所示的特性:
又因为平稳高斯过程的自相关函数等于平稳协方差函数。根据Wiener-Khintchine 定理[17]可知随机过程的功率谱和自相关函数构成了傅立叶对,可以得到:
其中:S(s)是平稳随机过程的功率谱密度,可以稀疏功率谱密度,并获得稀疏协方差函数。
Bochner 定理[17]指出,任何平稳协方差函数k(τ)都可以表示为正有限测度的傅里叶变换。所以式(22)中的功率谱密度S(s)是正有限测度,且与概率测度[17]pS(s)成正比。比例常数可通过令式(22)中τ=0 直接获得,并得到如式(23)所示的等式:
由此,可将核函数改写为一个期望值:
式(24)可以用蒙特卡罗方法来近似,方法是取对应于一组有限频率的几个样本的平均值。由于功率谱在0 附近是对称的,因此将频率始终成对采样{sr,-sr},消除式(24)中的虚部项后,得到式(25):
其中:sr取决于pS(s);ϕ(x)包含m对三角函数,即M=2m组非线性基函数,ϕ(x)的表达式如式(26)所示:
对于式(28),可以使用梯度下降算法[23]求解超参数的值。使用SSGP 方法的计算复杂度O(NM2),每个测试点的预测均值花费为O(M),每个测试点的方差预测的花费为O(M2),SSGP 方法的空间复杂度是O(NM)。
2.4 NLOS 误差定位
给定Na个基站的位置集合P=[p1,p2,…,pNa],其中pi=[xi,yi]是第i个基站的位置坐标,待估计标签的位置坐标为ptag=[x,y]。根据式(12)获得测距值d,采用式(29)估计标签的位置tag:
对于式(29),可以使用最小二乘算法[24]求解标签的最终位置tag。
3 实验结果与分析
3.1 实验设置
3.1.1 实验场景
图6 所示为定位系统实验场地。本文的UWB定位系统将基站及标签布置在一个8 m×12 m 的室内。在该室内布置了3 个基站,室内由玻璃、展示柜、墙、椅子、木门等障碍物形成NLOS 环境。针对不同障碍物的阻挡,本文各收集了300 个样本,并将收集样本的80%作为训练集,20%作为测试集。

图6 实验场地Fig.6 Experimental site
3.1.2 对比方法
为证明本文所提FCM-SSGP 方法的优越性和有效性,选取LS-SVM、SPGP 和LSTM 这3 种方法进行对比,对比方法的优缺点如表1 所示。

表1 不同方法的优缺点Table 1 Advantages and disadvantages of different methods
3.1.3 实验指标
使用灵敏度(Sensitivity),特异度(Specificity)和准确率(Accuracy)指标评价不同方法识别NLOS 信号的性能。灵敏度和特异度分别代表识别LOS 和NLOS 的性能,准确率代表整体识别性能,各指标的计算式如下所示:
其中:TTP代表样本被正确识别为LOS 的数量;TTN代表样本被正确识别为NLOS 的数量;FFP代表样本被错误识别为LOS 的数量;FFN代表样本被错误识别为NLOS 的数量。
其中:Rr和Rl分别是测距误差和定位误差的均方根值;Nt和Nr分别是测距样本数量及定位样本数量。
3.2 NLOS 信号识别和测距误差性能对比
3.2.1 LOS/NLOS 信号识别性能
由于本文所提方法是识别NLOS 信号后再抑制NLOS 测距误差,因此首先验证FCM 识别NLOS 信号的能力。本文选取了1.2 节的6 种特征,隶属度权重因子f=1.5,最大迭代次数T=500,聚类终止阀值为 0.000 1,并选取模糊综合评判法(Fuzzy Comprehensive Evaluation,FCE)[11]的NLOS 信号识别方法进行对比,实验结果如表2 所示。
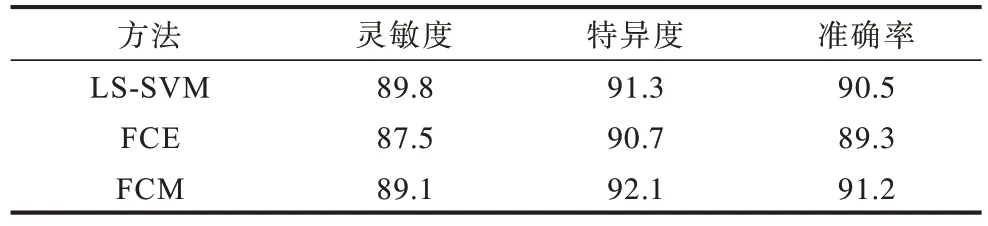
表2 不同方法的NLOS 信号识别结果对比Table 2 Comparison of NLOS signal recognition results of different methods %
由表2可知,在3种NLOS信号识别方法中,LS-SVM方法对LOS 信号的识别性能较好,灵敏度为89.8%。FCM 方法对NLOS 信号的特异度为92.1%,准确率为91.2%,相较于其他两个对比方法较好。由表2 还可知,3 种方法对LOS 信号的识别性能均弱于NLOS 信号的识别性能,这可能是因为在以木门及椅子为障碍物的NLOS 环境下,所选CIR 特征与LOS 环境下相差不明显,导致出现识别错误。
3.2.2 SSGP 基函数数量确定
在使用SSGP 方法抑制测距误差时,需要确定选取多少基函数才能保证在使用SSGP 方法时能够抑制NLOS 环境误差,获得与直接使用GP 方法相当的性能[9]。图7 所示为SSGP 基函数选取个数的不同对测距误差εm的影响。

图7 测距误差与SSGP 基函数个数的关系Fig.7 Relationship between ranging error and number of SSGP basis functions
由图7 可知,当SSGP 的基函数个数超过30 时,其测距误差εm收敛于GP 方法。因此,本文设置SSGP 的基函数个数M为30,从而能够降低复杂度,并且获得与直接使用GP 方法相当的性能。
3.2.3 NLOS 测距误差抑制
本实验将各个障碍物形成的NLOS 测试样本随机混合,并使用不同的抑制方法修正NLOS 测距误差。图8 所示为使用不同方法抑制NLOS 影响后测距误差εm的概率累计分布函数。

图8 测距误差的累计分布函数Fig.8 Cumulative distribution function of ranging error
由图8 可知,FCM-SSGP 的测距误差εm有66.31%在10 cm 以内,而LSTM、LS-SVM 和SPGP 方法分别有72.63%、43.68%和37.36%的测距误差εm在10 cm 以内,因此FCM-SSGP 的性能优于LS-SVM 以及SPGP。此外,FCM-SSGP 方法在CDF 为95%情况下的测距误差相较于性能较优的LS-SVM 方法相差15.72 cm。
表3 所示为4 不同方法抑制不同障碍物产生的NLOS 测距误差εm的均值以及RMS。

表3 不同方法抑制不同障碍物形成的NLOS测距误差对比Table 3 Comparison of NLOS ranging errors of different methods to mitigate different obstacles 单位:cm
由表3 可知,在障碍物是墙壁、展示柜等会对NLOS 产生较大影响的环境下,FCM-SSGP 方法的效果不如性能最优的LSTM 和LS-SVM 方法,测距误差均值分别低0.81 cm 和8.31 cm。但是当障碍物是椅子、木门和玻璃时,FCM-SSGP 方法的效果在对比方法中最好,测距误差均值分别是3.67 cm、3.09 cm 和6.29 cm,全面优于无法识别NLOS 信号的SPGP 方法。因此,FCM-SSGP 方法可有效抑制如椅子、木门、玻璃等轻微影响NLOS 信号的测距误差,而对展示柜这类障碍物并不能获得最优抑制效果,这可能与展示柜产生的CIR 特征分布较为杂糅有关。
3.3 定位性能验证
3.3.1 移动定位
图9 所示为使用FCM-SSGP 方法的移动定位示意图。

图9 FCM-SSGP 方法的移动定位示意图Fig.9 Mobile positioning schematic diagram of FCM-SSGP method
由图9 可知,除了位置2 周围的点存在较大的定位误差外,其他定位点都能接近真实轨迹。由于并不能确定每一个估计坐标点的真实位置,因此本文选取估计坐标与真实轨迹上最近的点作为真实坐标,以计算定位误差εd,移动定位误差的CDF 如图10所示。
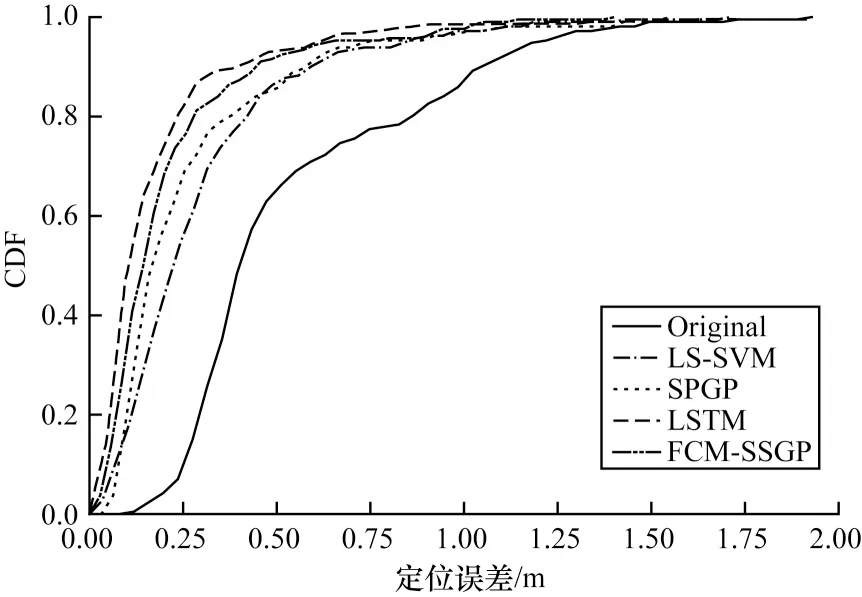
图10 移动定位误差的累计分布函数Fig.10 Cumulative distribution function of mobile positioning error
在实际应用中,定位误差εd在50 cm 通常为可接受的误差范围,由图10 可知,本文FCM-SSGP 方法达到该标准的CDF 占91.72%。虽然定位性能稍弱于LSTM 方法,但明显优于没有对NLOS 信号进一步划分并针对性训练的LS-SVM 方法,以及直接抑制NLOS 误差导致性能受样本分布影响较大的SPGP 方法。不同方法定位误差的均值和均方根值的具体数值如表4 所示。由表4 可知,本文FCMSSGP 定位方法的定位误差均值高于LSTM 方法2.97 cm,而分别低于LS-SVM 及SPGP 方法8.23 cm、6.73 cm。此外,FCM-SSGP 方法定位误差的RMS 最低,低于LSTM 方法0.48 cm,这说明使用FCM 方法对NLOS 信号进行划分并针对性训练可有效降低定位误差的RMS,提升定位精度。
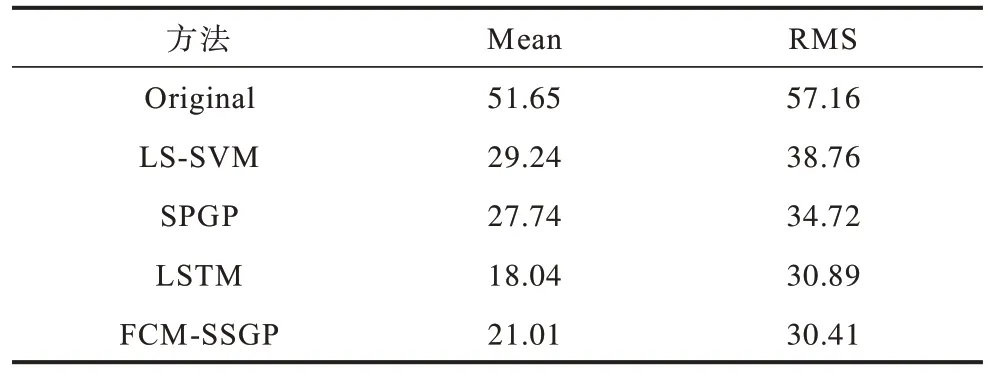
表4 不同方法的定位误差均值和均方根值Table 4 Mobile positioning error mean and root mean square of different methods 单位:cm
3.3.2 NLOS 环境下的静态定位实验
图11 展示了图9 中6 个静态位置点的定位误差。

图11 6 个静态位置点的定位误差Fig.11 Positioning errors of six static position points
从图11 可以看出在位置点2 和3 存在严重NLOS 影响时,使用LSTM 方法的效果最好。而本文FCM-SSGP 方法在其余位置点的效果更好。表5展示了静态定位性能指标的具体数值。从表5 可以看出FCM-SSGP 的εd均值最小,但由于对严重NLOS 影响的抑制性能弱于LSTM,导致定位误差的RMS 相较LSTM 偏大,不过仍然小于其余对比方法。

表5 静态定位误差均值和均方根值Table 5 Static positioning error mean and root mean单位:cm
3.4 定位方法复杂度
表6 所示为4 种定位方法所消耗的总时间。由表6 可知,FCM-SSGP 方法耗时最短,为9.81 s,这是因为FCM-SSGP 方法只需要训练NLOS 样本,且使用SSGP 方法降低了计算复杂度。定位性能较好的LSTM 方法所需要的定位时间最长,总共耗时91.77 s。而本文FCM-SSGP 方法在性能与LSTM 方法相差不大的情况下,总耗时降低了9.35 倍。结合之前分析可知,FCM-SSGP 方法在保证高定位精度的同时能大幅降低定位所需的时间。

表6 不同方法的定位时间对比Table 6 Comparison of positioning time of different methods 单位:s
3.5 基函数数量调优
在实际应用中,需要重点关注定位精度及实时性这2 个反应定位系统性能的评价指标。因此,本文通过实验验证FCM-SSGP 方法的定位精度和实时性随基函数数量M的变化,结果如表7 所示。

表7 基函数数量对定位性能的影响Table 7 Influence of the number of basis functions on positioning performance
由表7 可知,本文FCM-SSGP 定位方法随着参数基函数个数M的增长,定位精度和定位时间也随之增加。FCM-SSGP 方法的计算复杂度随着M的增加而增加,导致定位所需时间大幅增长,但定位精度增加的幅度却相对较小。因此,在实际应用中需要根据具体需求确定基函数个数M的大小,对所需的定位精度和定位时间做出权衡。
4 结束语
本文提出一种面向超宽带的定位方法FCMSSGP,利用FCM 划分轻度NLOS 信号或者一般NLOS 信号产生的误差,并结合SSGP 方法分别抑制轻度和一般NLOS 误差,利用最小二乘法得出抑制NLOS 误差后的位置信息,完成定位。实验结果表明,该方法能够利用FCM 聚类识别信道信息,具有较低的环境依赖性,通过使用SSGP 方法抑制NLOS测距误差,在存在墙、展示柜、玻璃等障碍物的室内实现了21.01 cm 的定位误差。该方法不仅具有较高的定位精度,且与LSTM 等定位方法相比,所需的定位时间大幅减少。下一步将在本文基础上对目标跟踪进行研究,减少在移动定位时由于NLOS 或者其他因素影响导致的异常定位点,从而提高定位精度。
