某型号无人机回收系统理论与试验研究
2023-03-15周锦程赵晨光林名润杜明俊
周锦程,赵晨光,余 翼,林名润,杜明俊,刘 贝
(上海航天设备制造总厂有限公司,上海 200245)
对无人机进行安全精确的回收成为无人机研制中的重要方向之一[1]。国内外学者先后在伞降回收系统的故障模式、动力学仿真等方面进行了研究[2]。本文针对某固定翼涡喷式无人机设计了一种安全可靠的伞降回收系统,由降落伞和爆破气囊组成,并通过仿真分析、地面模拟和正式飞行试验,验证了该方案的可行性。
1 回收原理
工作流程及原理如图1 所示,无人机收到回收指令后,先减速至100 m/s 以下,相对高度200~300 m,并保持平飞状态,此刻爆炸螺栓收到引爆信号,断裂面带动伞舱盖打开,引导伞随之飞出,进而拉出主伞,7 s 后,气囊舱处的爆炸螺栓收到引爆信号,并带动气囊舱盖打开,同时气瓶电磁阀收到放气信号,气瓶给气囊持续充气,直到无人机以6~7 m/s 的速度落地。气囊爆破,给予无人机缓冲效果,达到回收目的。
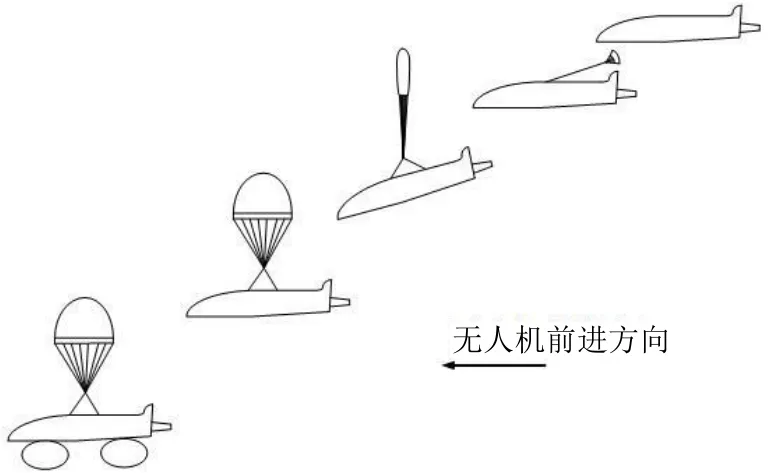
图1 回收系统回收流程及原理图
2 降落伞及气囊的计算分析
2.1 降落伞
降落伞由引导伞和主伞组成,本机型开伞通道顺畅,无多余钩挂物,采用了软质引导伞,软质引导伞具有质量轻、体积小的优点,软质引导伞卷入一层伞布中,并将伞布胶粘于伞舱盖上,用于拉出主伞。主伞采用中国靶机、靶弹成熟的常规双锥型伞设计。该伞型具备较大的阻力系数、较小的安装体积、较低的加工难度和较高的性价比。缺点在于其空中稳定摆动角度稍大,在本文无人机翼展不大的情况下,优先考虑了采用该款伞型[3]。
主伞的阻力特征面积可由稳降状态伞的阻力与飞机重量平衡关系得到[4]:
式(1)中:ρh为空气密度;V为稳降速度;Gxt为全系统重力。
对近海平面飞行、开伞高度200 m、回收速度100 m/s 条件进行理论计算。计算得到空中下降总时间约42 s,落地速度6.1 m/s。无人机系统轨迹计算结果如图2 所示。
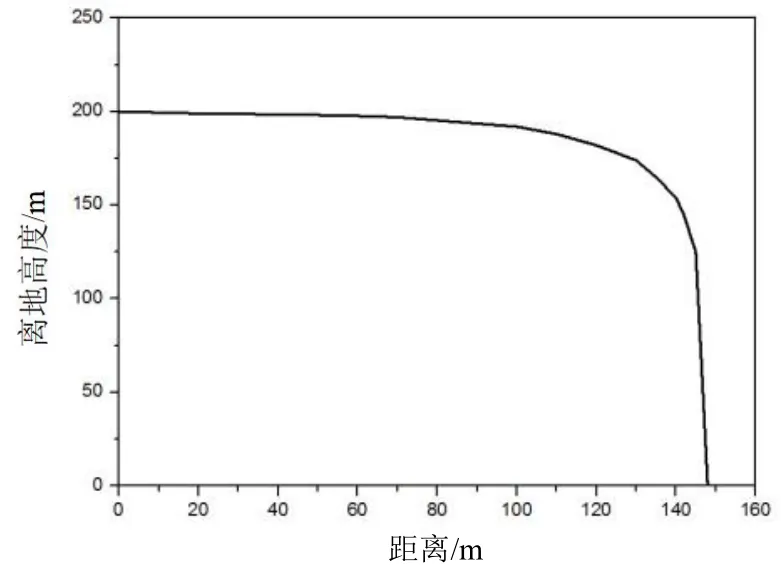
图2 无人机着陆轨迹曲线
2.2 气囊
着陆装备以速度v着陆时,有效载荷的动能为:
式(2)中:M为空投载荷的质量;v1、v2分别为空投载荷着陆冲击前和缓冲后的速度。
着陆缓冲气囊系统的任务就是将空投装备的动能吸收或耗散掉,空投装备着陆时,气囊给载荷向上的反作用力F,并会持续一段时间,使装备的下落速度从v1减小到v2,装备向下的运动行程为s,也成为气囊的缓冲行程。
气囊给装备的反作用力F所做的功Wf为:
在着陆过程中的能量变化ΔE为:
缓冲气囊很重要的一方面的设计在于控制反作用力F的大小,使F=NMGη,并在缓冲过程中保持不变,这是一种理想状态,因此缓冲气囊所做的功Wf可表示为:
式(3)中:N为装备允许的冲击过载系数;η为缓冲气囊的效率。
根据能量守恒,可推出气囊缓冲行程s,由此可得相应大小气囊的最大爆破压强。气囊缓冲时,忽略空投载荷下落过程的气动阻力,空投载荷在垂直方向只受重力、气囊内气体压力和大气压力的作用,受力方程为:
式(4)中:P为气囊内的压强;PN为标准大气压强;A为空投载荷与气囊的接触面积。
由计算得到理论最大着陆过载为a。
3 试验
3.1 气瓶气囊组合试验
为了确保在着陆前气囊能够达到充分鼓胀且不爆破的状态,需摸底气瓶中的气压值,如图3 所示,最终试验得出的气瓶最佳气压为28 MPa,充气到饱满状态需要24 s,即满足2.1 中降落伞降落时间(打开降落伞到打开气囊之间有7 s 间隔)。通过压力传感器检测整个充气过程,如图4 所示,在15 s 时刻开始充气,39 s 时刻充到饱满状态,满足回收要求。

图3 气瓶气囊充气试验

图4 气瓶气囊充气过程减压阀处气压值
3.2 着陆过载试验
着陆过载试验是为了验证在设计着陆速度下,机体着陆时着陆过载能否满足要求。一般着陆过载在不小于15g时,能够确保元器件不受损。
试验仪器准备:无人机工装、气瓶及管路、前后气囊、开关电源、三轴加速度传感器、自动脱钩等。试验如图5 所示,气囊充气后离地高1.84 m 自由落体,着陆速度6 m/s。

图5 着陆过载试验
图6 为无人机着陆时Y向加速度,即过载变化。通过对加速度计数据的滤波处理,在10 ms 有效过载中,Y向(竖直方向)最大过载为9.8g。此过载状态可确保机体不受损。
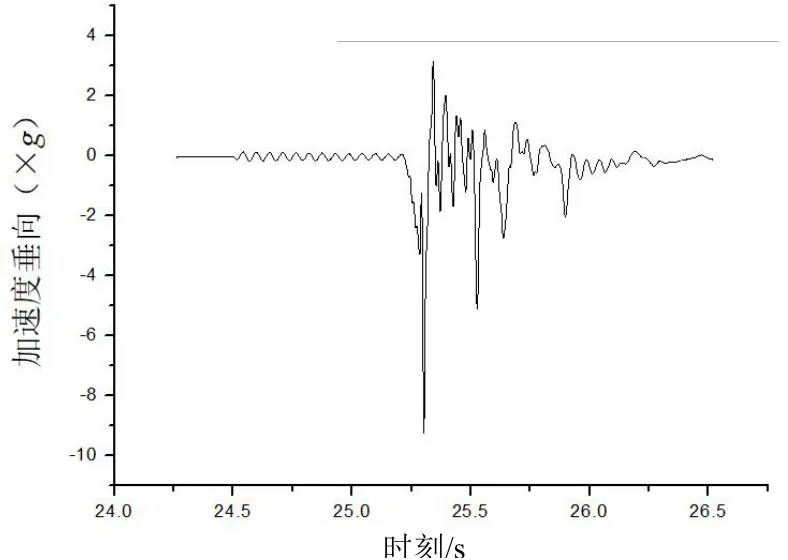
图6 着陆时Y 方向过载变化
3.3 正式飞行试验
无人机飞行完成后,飞行高度、动压满足回收条件,回收系统开始工作,固定伞舱盖的爆炸螺栓正常分离,伞舱盖正常抛出引导伞,引导伞正常张开并充气后成功将主伞包从回收舱中拉出,主伞完成充气,无人机在空中受伞绳拉力调整姿态至水平状态,并且迅速减速。图7 为着陆时无人机合成速度与时刻关系曲线,157 s 时刻主伞打开,速度由107 m/s 开始快速下降至匀速6.05 m/s 的速度着陆,落地时刻为第206 s。图8 为着陆过程中飞行高度与时刻关系,无人机在海拔1 650 m 的高度开始打开降落伞,下降至1 525 m 开始匀速下降,最终着落至1 300 m 海拔的地面上。

图7 着陆过程中合成速度与时刻关系
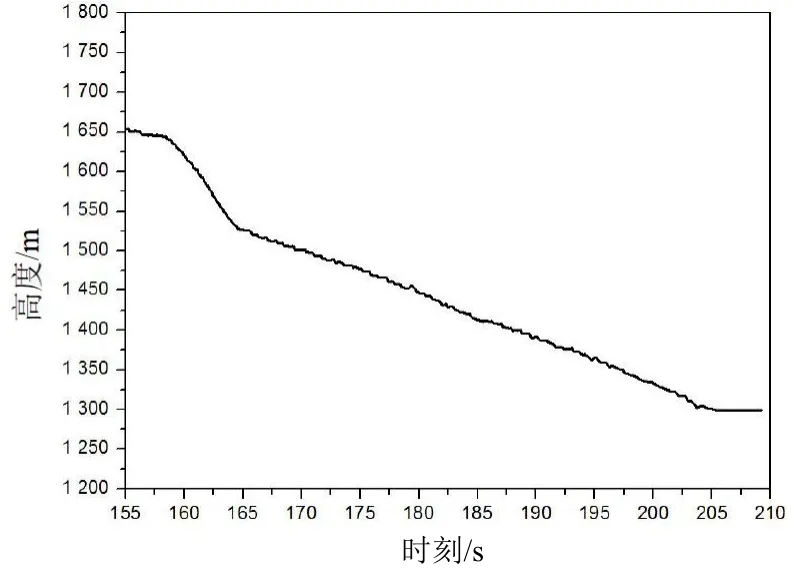
图8 着陆过程中飞行高度与时刻关系
最终从残骸外观判断,无人机外观完好、整体结构完整,舱体无损伤、无变形,机翼及舵面等直属件无明显变形,回收系统正常工作。
4 结论
本文设计了一种无人机的回收系统,并通过理论计算选取适用的降落伞与爆破气囊,同时设计了回收时序控制回收流程。此外,在飞行试验前通过地面充气试验来选定气源气压和精确的回收时序,通过着陆过载试验来验证回收系统对结构及电子元器件的有效保护。最终,在正式飞行试验中,验证了此回收系统和控制方法能够有效回收无人机,且外观完好、结构完整,回收性能好,回收可靠性高,回收落点精度高。
