基于倾斜摄影测量与激光扫描技术的融合建模研究
2023-03-14孙佳明
孙佳明,李 慧
(广东省水利电力勘测设计研究院有限公司,广东 广州 510635)
1 概述
近年来,实景三维中国建设是我国发展战略之一。实景三维模型是构建数字孪生城市最直观的重要基础数据,可为城市和工程项目建设提供全流程的可视化支撑,已成为我国新型基础测绘的标准化成果之一[1]。实景三维模型可为工程全周期提供设计蓝图与现实环境相结合的视觉体验,可将设计、生产、管理等信息整合到统一数字底座上进行展示[2],目前主要应用于工程区域环境展示、工程进度汇报、设计方案展示等方面[3- 5]。
倾斜摄影测量和激光雷达扫描技术是目前构建实景三维模型构建的重要手段。倾斜摄影测量技术是通过传感器以不同视角进行拍摄,快速获取测区丰富的数据信息,然后通过影像密集匹配、空三计算、映射表面纹理等数据处理工作,构建目标地物的真实客观情况,提供测区的三维数据信息[6]。
倾斜摄影测量主要通过无人机搭载多角度影像采集相机以获取完整、准确的纹理数据和定位信息,提升建模效果。该技术有着成本低、人工干预少、效率高、可获得更真实的视觉效果等优势,是目前大场景实景三维模型生产的重要技术手段[7- 8]。但在实际工程应用中,由于受到天气、场景环境、航高、数据处理算法等因素的影响和限制,通过影像重建的三维模型往往存在凸包、空洞、拉花等缺陷,特别在多以弱纹理覆盖为主、地形起伏较大的水电工程项目中,倾斜影像自动匹配难度较大、房屋等矮小建筑物分布密集,飞行器姿态变化引起的误差、影像分辨率引起的同名点匹配误差都容易造成建筑物侧面或屋檐底部模型粘连,建模效果不佳。对于存在缺陷的单体建筑物三维模型可通过人工修模的方式进行模型优化,但对于大场景建模而言,人工优化的方式不仅生产效率低还增加了工程成本和人力投入,不能满足日常项目生产的需要,这也是目前工程项目和实际生产中三维建模面临的普遍问题。
激光扫描技术作为一种非接触式的主动测量技术[9],可在天气条件不理想的情况下进行作业。该技术通过搭载在不同平台上的激光扫描仪通过面状扫描获取目标地物表面的三维坐标信息,以较高数据采集效率获取海量的激光点云数据,通过高密度点云数据建立三角网,生成地物的数字表面模型,同时利用激光扫描仪搭载的相机拍摄影像为点云数据赋色,使得点云数据三维可视化效果更接近于真实场景。激光扫描技术具有数据获取速度快、人员易操作、安全性高等技术优势,可大幅度降低外业人员的作业强度,极大提高数据采集效率,为项目生产提质增效。获取的激光点云数据具有密度高、精度高、抗干扰能力强等特点,在文物修复与保护、电力巡检、数字矿山[10- 11]等领域有着较广泛的应用。但是目前由于仪器设备的限制,该技术还存在一些不足之处,主要表现在实际应用中针对扫描仪视角场以外的地方,例如建筑物顶部等区域往往出现因视角盲区导致的数据扫描不完整的情况,以及搭载的同轴相机拍摄视角不佳导致的影像纹理欠缺等问题。
由此可见,如果利用单一的数据源进行实景三维模型构建,虽然都有各自的技术优势,但是在实际工程应用中都不能很好地满足人们对于三维信息的需求。本文通过深入分析激光雷达扫描技术与倾斜摄影测量技术在实景三维模型构建中存在的优点与不足,见表1,拟将两种技术进行结合,开展激光点云数据与倾斜摄影测量影像的融合建模实验,弥补单一数据源建模存在的缺陷,探究融合建模技术在提升模型效果方面的可行性,提高模型精度和质量,增加模型的可量算性和实际应用的可靠性。
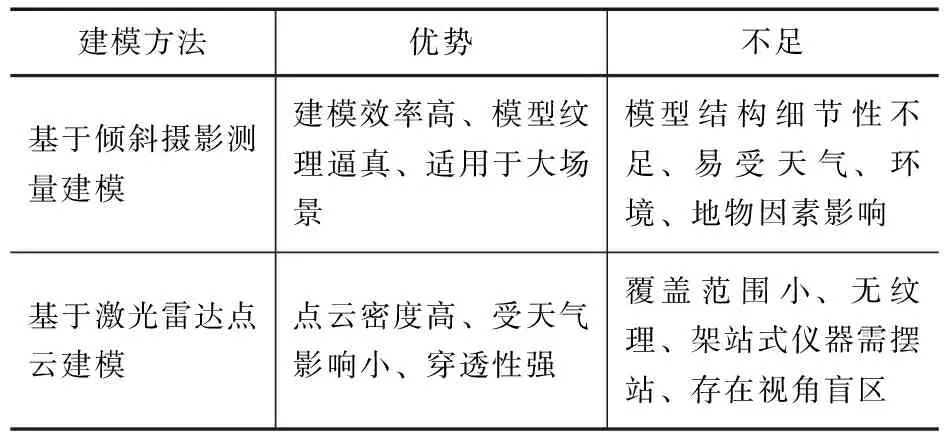
表1 实景三维建模方法对比
2 关键技术与主要流程
2.1 数据准备
在融合数据处理前,首先需要准备覆盖测区范围内的倾斜摄影影像、激光雷达点云数据、POS数据、相机文件。如果是机载激光雷达还需准备航迹数据,并检查二者坐标系是否一致,如不一致则需进行坐标转换。待航迹和激光点云坐标系匹配以后,再导入软件中进行激光点云和影像点云进行配准和建模。
2.2 基于倾斜摄影测量的三维模型重建技术
倾斜摄影测量技术突破了以往只能从空中垂直拍摄的局限性,通过将多台传感器搭载在无人机上,在空中对地面进行垂直向、多角度倾斜向拍摄以获取影像数据,给予人们符合人眼视觉的真实客观世界[12]。目前该技术被广泛应用于国土安全、水利电力、应急抢险、城市规划管理等领域。
基于倾斜摄影测量进行建模的关键技术包括空三加密计算、密集匹配处理、纹理映射等[13]。空三加密通常利用软件加载多视角影像数据以及采集时获取的POS文件,通过光束法构建区域网进行整体平差计算,通过多次解算得到精确的外方位元素,然后通过控制点量测,得到空三加密成果[14]。是将整体区域以最佳方式加入控制点坐标系并恢复地物物方位置关系的过程[15]。影像匹配算法是根据拍摄的相片自动匹配出所有的同名点,然后通过提取大量特征点以构成密集点云,得到地表的三维信息数据,主要技术流程如图1所示。目前,常用的三维建模软件包括:ContextCapture、瞰景Smart 3D、大疆智图等,这些均为基于图形运算单元GPU的快速三维场景运算软件。
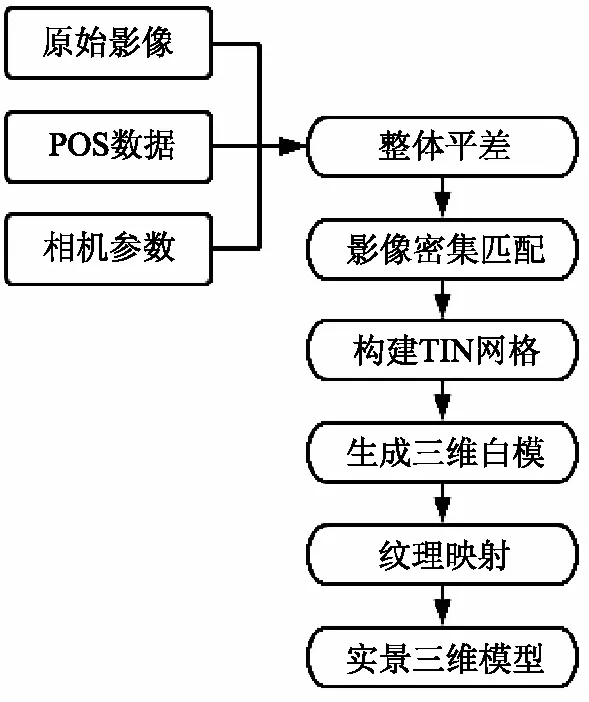
图1 基于倾斜摄影测量技术的三维建模流程
2.3 激光雷达数据与倾斜摄影测量影像融合建模
融合建模的关键点是将倾斜摄影测量密集匹配过程中产生的大量点云数据与激光点云数据合并作为三维模型几何结构的数据源。首先,利用倾斜摄影测量数据进行常规空三解算,生成基于影像数据的点云。其次,将预处理后的激光点云数据导入软件平台,在融合前需保证两种点云数据格式的一致性,常用的数据格式为*.e57和*.las,然后通过配准将激光点云和影像点云转换到同一坐标系下。接着,提交空三进行解算,此时融合后的点云数据将会一同参与空三解算。最后,待融合点云空三解算完成后,将融合后的点云数据建立不规则三角网,再对三角网进行分割生成三维白模。通常在三维模型重建过程中,软件会自动从影像中自动计算相应的纹理,通过匀光匀色、分辨率设置等自动将纹理映射到三维白模上。部分软件也可以将赋色点云纹理用于模型纹理贴图,但是映射效果不如影像纹理映射效果佳。通过两种技术进行融合建模的主要流程如图2所示。
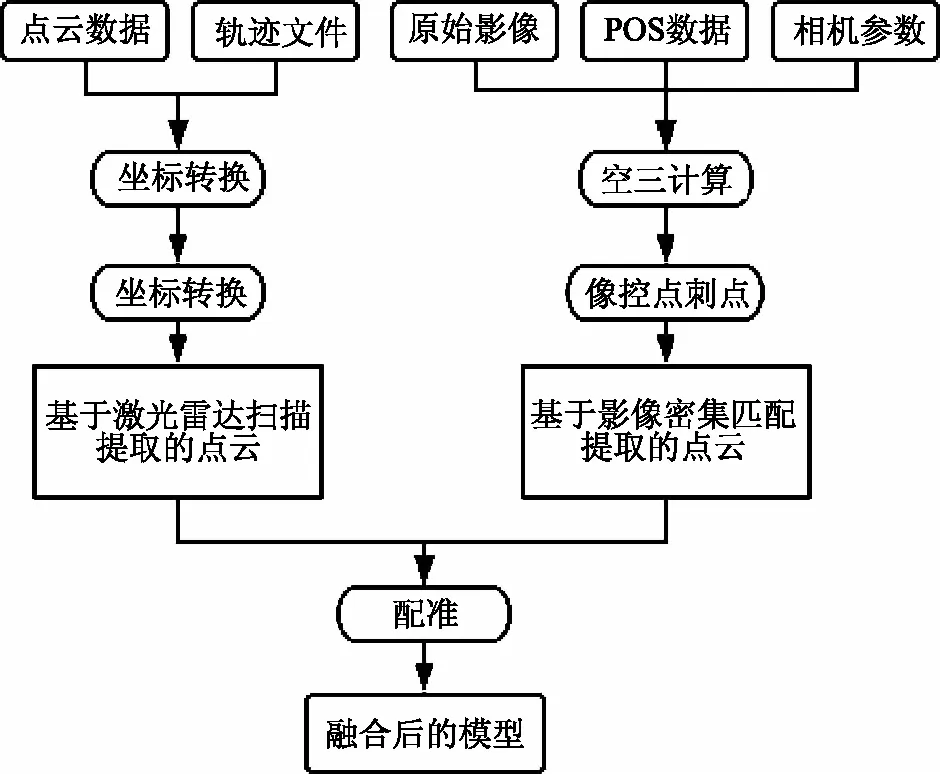
图2 基于倾斜摄影和激光扫描技术的融合建模流程
3 研究实施过程
为了评价激光点云和影像点云融合后建立的三维模型的效果,本文选取某牌坊作为三维建模对象开展融合建模实验。通过架站式三维激光扫描技术获取目标对象的点云数据,通过机载倾斜摄影测量采集目标对象的影像数据。架站式激光雷达是将由激光测距仪和反射棱镜组成的激光扫描仪架设在地面上,以一定的均匀角速度进行旋转扫描,通过主动发射激光和接收回波信号进行测距,通过解算得到测站与扫描点之间的相对坐标,联合测站的已知坐标解算出物体表面的三维坐标,形成激光点云数据。架站式激光点云数据具有高精度的特点,可以对倾斜摄影在近地面区域数据精度低起到良好的补充作用。倾斜摄影测量通过空中对地拍摄可以补充架站式三维激光扫描数据顶部因扫描盲区和视角不够广等缺陷造成的数据空洞。对采集的影像数据和点云数据进行融合建模,并将融合后的三维模型与基于倾斜摄影测量技术建立的三维模型进行对比分析,以此验证融合技术对建模效果提升的可行性。
3.1 数据概况
本案例通过机载倾斜摄影测量技术共拍摄78张影像,影像尺寸为5472×3648。激光点云数据选用徕卡RTC360扫描获取激光点云数据,视角场水平为360°,垂直为300°,扫描范围为0.5~130m,扫描速率高达2000000点/s。
3.2 实施步骤
利用软件平台对采集的影像和激光点云数据进行常规倾斜摄影数据处理和点云融合建模处理,主要包括以下几个步骤:
(1)数据导入。新建工程,在软件中导入采集的影像和对应的POS信息,也可将POS信息提前写进影像里再进行导入。对影像路径及影像完整度进行检查,确保影像数据无误即可进行下一步操作。
(2)空三加密。创建空三任务,输入空三任务名称,影像数据选用所有导入的影像数据。设置姿态、位置、连接点密度和匹配模式等参数后即可进行常规空三解算,此次解算过程中,只有连接点参与解算,控制点不参与解算。解算后的影像点云成果如图3所示。在倾斜摄影测量得到的大量照片点云的基础上,导入架站激光扫描仪扫描获得的点云数据,点云数据支持格式为*.e57和*.las,如图4所示。

图3 倾斜摄影测量影像空三解算后的点云成果
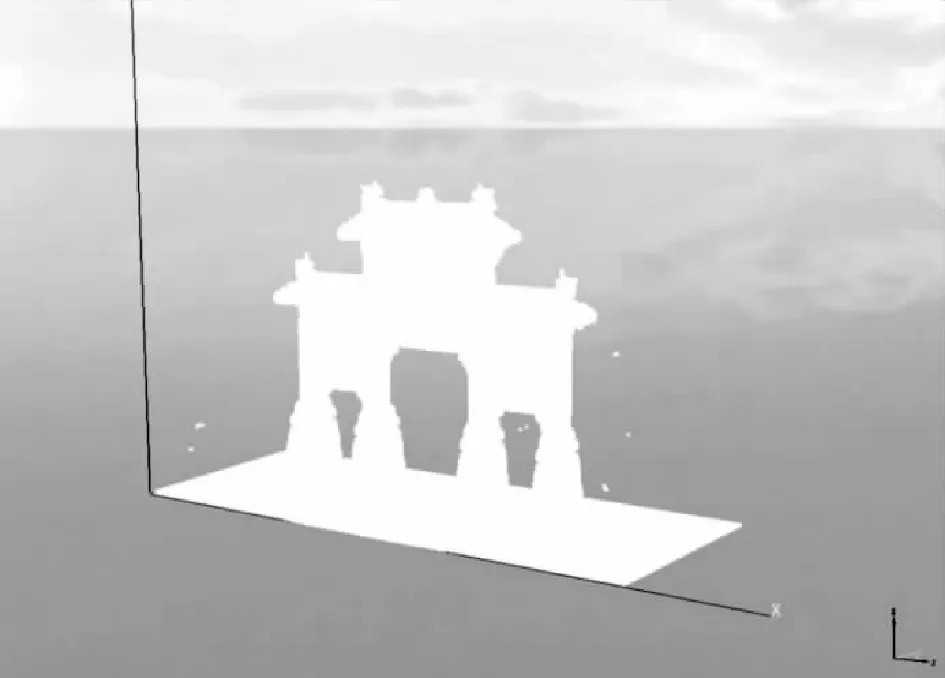
图4 架站式激光扫描获取的点云数据
(3)点云配准。从导入的激光点云数据中提取6个特征点的坐标信息,将这些点作为人工控制点导入软件中,在影像点云中进行控制点刺点工作并提交空三任务进行控制点平差计算,此时采用控制点平差计算对区块进行精确配准处理,平差完成后融合的点云数据如图5所示。

图5 融合后的点云数据
(4)三维模型重建。确认融合后的点云无分层后可进行三维重建,设置重建瓦块大小、模型坐标系原点、发布数据格式等参数。模型几何来源选用图片点云混合构建,纹理来源选用图片纹理,然后提交重建任务进行模型生产,生成的融合后的三维模型效果如图6所示。

图6 融合激光点云数据和倾斜摄影数据建立的三维模型
3.3 模型效果对比
为更直观地对比模型在结构方面的变化,隐藏三维模型的纹理,仅用TIN生成的三维模型白模进行融合前后模型效果对比。由图7可见,基于倾斜摄影数据建立的模型中避雷针和电线等特征在模型中明显缺失,屋檐下部存在明显拉花现象,柱体等表面存在凸包。图8为基于激光点云数据建立的模型,可以看到模型中的花纹等细节性呈现较好,但建筑物顶部砖瓦存在严重空洞,这主要是由于架站激光扫描仪扫描角度有限,往往存在建筑物顶部扫描不完整的情况。图9为激光点云数据和倾斜摄影测量数据融合后的模型,从图中标注出的红色圆圈中可以看到,融合后的模型可以完整构建避雷针、电线等细节特征,屋檐下部结构特征改善较为明显,柱面相较于倾斜摄影测量建立的模型更加平整,可见融合后的模型细节表现能力有所提升,模型质量得到了较大程度的提升。并且由于倾斜摄影恰好可以补充顶部视角,因此融合后的模型建筑物顶部结构完好,很好地弥补了地面激光点云建模的缺陷。
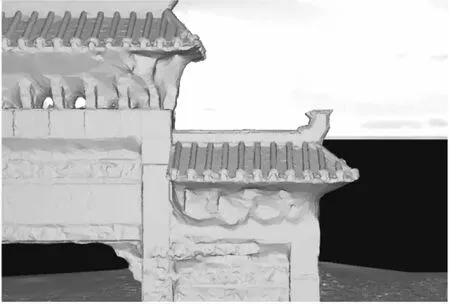
图7 基于倾斜摄影数据建立的模型

图8 基于激光点云数据建立的模型
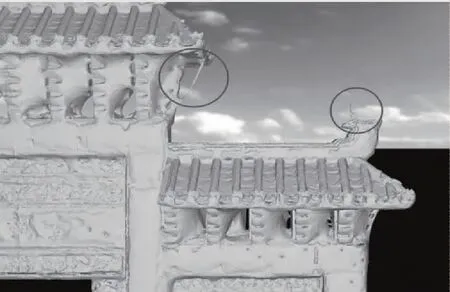
图9 点云融合后建立的模型
4 结语
采用单一数据源进行三维模型生产往往建模效果不佳,不能满足生产过程中的实际需求。基于提高倾斜摄影技术在工程中建模效果的目的,本文通过分析对比基于倾斜摄影测量技术的建模方法和基于激光雷达点云数据的建模方法在实际工程应用中的优缺点,提出将二者融合进行三维建模的必要性。本文详细介绍了融合建模的关键技术和操作流程,结合案例实测数据开展实验,通过成果对比分析,结果表明激光点云数据与影像数据融合进行建模可有效提升模型质量,特别是在模型屋檐下部、建筑物顶部等结构方面改善较为显著,融合后的模型更能体现结构细节性,可更好地应用于实际项目生产中。但激光点云与影像点云融合后进行模型重建处理的耗时也会随着点云数据量的增大而增加,因此还需要进一步优化点云融合处理算法,并且对建模数据处理设备方面有一定的要求,以增加模型生产效率。
