载人飞船组合体期间应急撤离任务规划
2023-03-13郭祥艳申聪聪李晓明马鹏德董万坤
郭祥艳 申聪聪 李晓明 马鹏德 董万坤
(北京航天飞行控制中心, 北京 100094)
1 引言
根据载人航天工程空间站关键技术验证及建造阶段飞行任务安排,从2021 年6 月神舟十二号载人飞船发射入轨,成功与天和核心舱前向交会对接开始,陆续发射载人飞船,空间站建造初具规模。 在此过程中,将实现航天员从短期驻留到长期驻留,解决从一定规模到较大规模的空间应用问题[1]。 当组合体发生影响航天员驻留安全的故障时,应能够保障航天员安全,及时撤离。 本文的应急撤离,是指在组合体期间,一旦发生可能危及航天员生命安全的事件,或导致载人飞船不能和目标飞行器继续组合体飞行的故障时,能够立即中断正常飞行程序和飞控计划的执行,通过航天员和地面同步实施的应急处置措施,确保载人飞船与目标飞行器快速分离并撤离至安全状态的过程。
现有的应急任务规划研究主要集中在对地观测卫星的应急成像任务,即根据应急任务观测需求和卫星的约束条件,生成成像控制和传输控制指令,通常将规划问题抽象,建立数学模型并精确求解[2-3]。 但在载人航天器应急撤离过程中,各飞行事件与飞行时序、测控、光照,以及工程实践经验等约束条件强耦合,难以直接采用成熟的规划模型和算法进行应急撤离任务规划。 同时,针对载人航天器组合体飞行期间的应急撤离,现有的研究成果较少,国外的文献大都侧重于对空间站故障预警能力的分析[4]和对航天员应急处置能力的训练和提升[5-7],中国王志莹[8]等在理论层面对应急撤离故障模式、安全状态和撤离流程进行了分析,提供了解决应急撤离问题的部分思路。
本文基于工程实践考虑,为应对航天员长期在轨期间应急撤离具体操作需求,首先在对应急撤离各影响因素深入分析的基础上,重点研究撤离期间分离点选取需满足的约束条件,并构造拉格朗日函数求解满足条件的分离点;其次以求解的分离点为基准,对分离前后飞行事件进行人工规划,并以测控区内发生热控故障地面决策应急撤离为例对规划流程进行分析,最后将本文规划结果和实际在轨演练结果进行比较,验证规划流程的合理性和可实施性。
2 正常撤离与应急撤离
正常撤离是载人任务飞行乘组顺利完成驻留工作,按照飞行计划安排实现载人飞船与目标飞行器分离、撤离的过程。 正常撤离以分离时刻为界分为分离准备段和分离撤离段,分离准备段航天员主要完成空间站驻留舱段物品撤收、留轨物资清理装运,完成空间站无人状态设置,以及驻留舱段以及各来访飞行器舱门关闭和检漏等。 地面控制系统主要完成飞船和目标飞行器分离前状态设置,主要包括飞船测控、导航、环控、生保等设备开机和功能检查,分离前飞船和目标飞行器状态设置和确认等工作。 分离段主要由航天器自主完成刚性连接解锁并撤离至固定停泊点。
应急撤离是故障情况下的撤离。 载人飞船与空间站舱段组合体飞行期间,导致应急撤离的故障模式主要包括载人环境异常[9-10]、推进系统泄漏故障和电源系统故障[11]以及组合体受到其他在轨飞行器碰撞预警威胁等。 各故障模式对航天员安全危害程度较高,需尽快使组合体从常规飞行模式切换为应急故障处置模式,并在决策实施应急撤离后,能够在故障造成实际危害之前保证载人飞船安全撤离。 因此,与正常撤离相比,应急撤离对撤离时长要求较高,需要对正常撤离前分离准备时间进行压缩,减少分离准备段的操作项目,两者的主要区别如表1 所示。

表1 应急撤离和正常撤离区别Table 1 The difference between emergency evacuation and normal evacuation
3 应急撤离流程分析
应急撤离是在故障发生之后的有限撤离时间内,通过合理安排人、船、器、地撤离项目,实现故障情况下紧张有序撤离,保证航天员安全。 根据故障发生时机不同,应急撤离分为航天员自主启动应急撤离和地面决策启动应急撤离。
3.1 航天员自主启动应急撤离流程
对于测控区外发生直接影响航天员安全的故障(如驻留舱段失火、失压等),因故障危急程度高,由航天员自主决策启动应急撤离,并开始执行分离撤离前准备工作,主要包括撤收驻留舱物品、飞船状态设置等。 当组合体进入测控区后,地面通过实时遥测数据获取组合体状态参数。 若判断组合体发生紧急故障,且航天员在测控区外决策并启动应急撤离,则首先与航天员沟通确认组合体状态,并授权航天员继续完成分离前各项工作,同时地面测控系统分析具体故障数据确定故障模式及故障发生时间,并同步开展应急撤离准备工作。 实施流程如图1 所示。
航天员自主决策启动应急撤离时,由于故障发生在测控区外,应急撤离有效时间由故障允许处置时间[8]和故障发生在测控区外的时间差决定,测控区外航天员完成的工作不占用应急撤离有效时间,同时地面决策后续处置后,由地面和航天员并行开展撤离前准备工作,航天员的操作同样不占用应急撤有效时间。
3.2 地面决策启动应急撤离流程
对于测控区内发生的导致应急撤离故障,由地面判断决策启动应急撤离,其实施流程包括:首先地面通过遥测数据与航天员沟通确认组合体工作状态、故障模式等,根据故障模式决策是否启动应急撤离,并告知航天员;在地面决策启动应急撤离后,地面和航天员并行开展分离撤离前的准备工作,航天员主要完成组合体内物品撤收、状态设置及关闭舱门等操作后,撤离至载人飞船。 地面主要完成分离条件计算、分离点选择和确认、飞行程序生成注入及分离状态监视等,实施流程图如图2 所示。
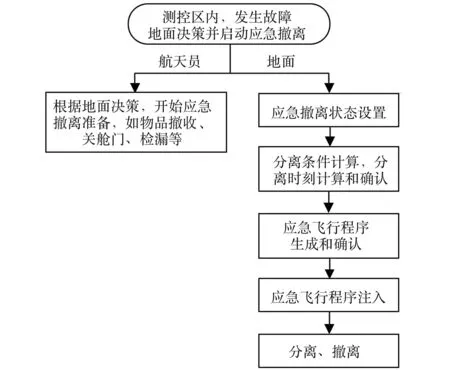
图2 地面决策启动应急撤离流程Fig.2 Flowchart of ground flight control center decision-making for emergency evacuation
与航天员自主启动应急撤离程序相比,地面决策情况下对故障模式及故障发生时机等异常掌握更及时,由于故障发生在测控区内,应急撤离有效时间仅由故障允许处置时间决定,航天员的操作同样不占用应急撤有效时间。
4 应急任务规划
载人航天器应急撤离过程由一系列飞行事件组成,各飞行事件的起始时间通常与故障发生时刻、故障类型、测控条件等绑定,飞行事件之间的时间间隔还需要满足航天员准备、地面准备等条件。 任务规划就是以满足飞行时序、测控等多约束条件为目标,合理安排各个任务事件的执行顺序[12]。 但由于应急撤离各飞行事件与飞行时序、测控、光照,以及工程实践经验等约束条件强耦合,难以采用程序自动规划的方式直接输出规划结果,因此本文采用人工规划方式,对应急撤离期间的规划流程进行分析。
无论是由地面决策还是航天员启动的应急撤离,选择分离点是任务规划的关键,只有选定满足约束条件的分离时刻,撤离期间各飞行事件才可按照时序和约束进行规划。
4.1 分离点选择的约束条件
应急撤离中载人飞船和目标航天器分离时刻的选择需要满足一定约束条件,假设t为允许分离时刻,各约束条件可具体描述为:
1)测控覆盖约束。 不管是航天员自主启动还是地面决策启动应急撤离,要求分离过程均安排在测控站内实施,以确保地面能够对分离前状态进行确认,同时对分离过程关键飞行事件进行监视,并在必要时进行干预。 将组合体分离前地面制定飞行程序的执行时间和分离状态确认时间记为TZ,同时将组合体执行刚性连接解锁时间记为TJ,根据分离点选取原则,需要在[t-TZ,t+TJ] 有测控支持。
2)飞行事件约束。 载人飞船和目标飞行器应急分离之前,地面和航天员需要并行完成分离准备工作。 地面需要完成分离状态设置、分离程序生成、会签和注入,以及组合体姿态调整等;航天员需要完成飞船状态设置、目标飞行器物品撤收、舱门关闭和泄压等。 该撤离准备过程根据工程任务经验可量化为固定时长TI,实际执行过程中可以根据故障发生时组合体飞行模式、地面飞控模式、实际测控条件、停靠飞行器数量等修改该准备时间。 定义t0为决策快速撤离时间,则t需满足t-t0≥TI。
3)撤离有效时间约束。 发生导致应急撤离故障时,不同的故障模式,其特性及变化趋势不同,因此从故障发生至影响航天员安全的持续时间不同,把该持续时间定义为故障允许处置时间。在载人航天器研制阶段,通过故障模式的影响分析及试验验证,能够确定每种故障模式下的故障允许处置时间[8],本文将其定义为tmax。 当故障发生在测控区外时,还需要确定测控区外的故障时间,记为tout,分离点需选在故障有效处置时间内,即t≤tmax-tout。
4)太阳入射角约束[13-14]。 太阳入射角要求与航天器自身能源、热控等分系统的约束要求相关,可综合为航天器在一段飞行时间内太阳矢量与轨道平面夹角的要求。 分离和撤离过程,需要满足太阳入射角小于固定角度值α。 定义θ(t)为t时刻太阳矢量与轨道面的夹角,TD为载人飞船撤离至固定停泊点时间,则需要满足θ(t,t+TD)<α。

4.2 分离点选择的方法
为求分离点在上述约束条件下的最优解,本文构造拉格朗日函数f(t) 如式(1) ~ 式(5)所示:
其中t0为决策快速撤离时间,tmax为快速撤离允许处置时间,[tn,tn+1] 为测控跟踪弧段跟踪时间区间。σ1和σ2为拉格朗日惩罚因子。
通过求解minf(t) ,获取满足条件的分离点值,同时将t代入上式(4)(5)中判断是否满足测控约束,从而获取最终分离点值。
4.3 应急撤离任务规划流程
应急撤离过程任务规划,是以计算出的分离点为基准,在满足飞行时序、测控、光照、航天员操作、地面准备等多约束条件下,输出应急撤离期间各个飞行事件的起始时间,使得规划结果满足应急撤离各项要求。 撤离任务规划区间包括从组合体状态分析确认导致应急撤离故障发生开始,直至载人飞船撤离到安全距离的时间段。 其具体实施项目如下:
1)确认状态决策撤离。 当组合体进入测控区后,地面根据遥测数据对故障模式、故障发生时间进行确认。 故障模式可确定该故障下后续处置,当决策应急撤离后,根据故障模式可知故障允许处置时间tmax,若故障发生在测控区外,还需要确认故障发生时间,从而得到应急撤离有效处置时间区间[0,tmax-tout] (若故障发生在测控区内,则tout= 0);
2)获取预报文件,选取分离点。 获取地面计算的应急撤离预报文件,主要包括太阳入射角预报文件、阳光抑制角预报文件、测控预报文件,作为分离点选取的依据文件,并根据4.1 和4.2 节分离点选取方法,选取分离点;
3)调整飞行程序和测控网配置。 依据选取的分离点,制定应急飞行程序和测控网配置,生成应急飞控计划、应急测控资源申请,并完成各系统会签确认;
4)飞行程序注入。 飞行程序会签确认无误后,当组合体进入测控区,地面完成应急飞行程序注入;
5)航天员撤离准备。 地面将分离时刻通知航天员后,航天员完成应急撤离前的准备工作,完成后和地面确认完成情况,因此过程和地面应急撤离准备并行开展,不占用应急撤离有效时间;
6)分离。 在满足分离约束条件下,组合体在分离时刻到来时执行刚性连接解锁,解锁后组合体实现分离,该时间段为固定时长,由载人航天器设计状态决定;
7)撤离。 载人航天器与目标航天器分离并撤退至固定停泊点后,地面发送撤离指令,使载人航天器撤离至安全距离,后继承接载人飞船正常返回程序,应急撤离规划结束。
4.4 应急撤离任务规划样例
按照上述规划步骤,以发生载人环境异常、地面决策启动应急撤离为例进行规划。 当驻留航天器发生载人环境异常时,可能破坏其常温常压的驻留环境[8],直接危及航天员的安全,因此航天员应尽快返回地面以确保安全。 具体规划过程如下图3 所示,图中各时间区间说明如下:

图3 应急撤离任务规划过程Fig.3 Planning process of emergency evacuation mission
1)故障发生后,在T时间段内要完成故障分析、组合体状态确认,根据故障预案和实际状态决策是否应急撤离。 其中故障分析、组合体状态确认需要依据下行遥测数据,因此需在出测控弧段1 前完成,其后沿时间为出测控弧段1 的时间。通过故障分析可得tmax,后继需在tmax内完成撤离期间各飞行事件任务规划;
2)当决策应急撤离后,应尽快计算分离点,作为地面后继任务规划的基准。 实际计算时,根据任务轨道计算的轨道日照角文件、阳光抑制角度文件和测控覆盖文件为输入文件,设置测控覆盖步长为1s;
3)选择分离点后,地面需根据分离时刻生成应急撤离飞行程序,并完成飞行程序的校核和确认,用于保证飞行程序的正确性和有效性,此过程耗时为T2+T3,规划时将两部分均设为固定时长30 min;
4)由于不具备全时段测控覆盖,在地面完成飞行程序会签确认后,需要等待测控区执行飞行程序注入,此过程总耗时为T4;
5)分离点的选取受到测控、光照、飞行事件等多种条件约束,组合体在分离点所在测控弧段内执行分离指令。 将地面和航天员分离前准备工作完成后,且分离点弧段到来之前的等待时长记为T5;
6)组合体分离之前需完成分离程序执行,设置目标飞行器和载人飞船分离前状态,该时间段为固定时长T6,由地面制定飞行程序决定;
7)组合体在分离时刻到来时即执行刚性连接解锁,解锁时间为固定时长T7,由载人飞船设计状态决定,解锁之后组合体实现分离,撤退至固定停泊点,该时间段也为固定时长T8。
为进一步明确应急撤离期间各事件起始时间,判断应急规划结果是否满足任务需求,本文假设上述载人环境故障发生时间为测控弧段1 进站后5 min(即某天北京时08:00:00),根据4.2 节分离点计算方法计算得到满足条件的分离点为测控弧段3 跟踪开始后19 min(即北京时10:46:00);该故障下达到安全状态,即组合体分离的允许处置时间为定值,采用上述规划方法,对应急撤离任务规划结果采用甘特图的形式表示,如图4所示。 从图中可以看出,本次规划时间区间约为3 h,小于该故障情况下应急撤离工程指标要求。

图4 应急撤离任务规划结果Fig.4 Planning results of emergency evacuation mission
5 规划流程验证
为了验证本文规划流程的合理性和可实施性,将一次实际在轨地面决策启动应急撤离演练与本文规划结果进行比对。 本文的规划开始时间和在轨演练一样,都是从故障发生决策应急撤离开始,结束时间为载人飞船与目标航天器分离并撤离到固定停泊点,两者结果比较如下:
1)在分离时刻选择上,在轨演练时分离点依赖地面人员工程经验人工选定,和本文规划采用的分离点选择方法虽然不同,但是由于分离点约束条件和选取原则近似一致,所以两者选择分离时刻相同;
2)分离程序生成、确认和注入上,由于规划的飞行程序生成和确认是固定时长,在轨演练中这两部分时长都小于规划时长,同时演练中飞行程序注入时刻早于规划开始时间,但是由于两者分离时刻相同,在轨演练中测控等待的时长较长;
3)分离和撤离过程,对分离程序执行、分离和撤离而言,本文规划结果和实际在轨演练结果一致。
结果表明,本文的规划流程、规划结果和实际在轨演练流程近似相同,可以保证故障时地面及时决策,合理安排各飞行事件,实现航天员的安全撤离。
6 结论
1)本文提出的应急撤离任务规划流程,将撤离期间的飞行事件及其起始时间进行量化,能够在应急撤离有效处置时间内完成撤离,且分离前后各事件满足约束条件,测控等待时长较短;
2)本文主要关注于组合体期间应急撤离通用任务规划流程,规划结果基于常规飞行和飞控模式,后续需根据任务实际建立各种模式下应急撤离流程,并细化应急撤离分支;
3)对应急撤离任务规划,目前基于人工模式的规划流程,规划过程依赖地面操作人员的工程经验、熟练程度等,后续将研究撤离期间动态规划技术,建立规划的模型和算法,使得撤离期间各飞行事件自动规划,进一步缩短规划耗时,优化规划结果,保障航天员长期在轨驻留的安全性。