有/无人协同近距空中支援作战研究*
2023-03-11纪小柠刘学军唐宗伟潘浙平
纪小柠,刘学军,唐宗伟,赵 军,潘浙平
(1.空军研究院,北京 100085;2.空军指挥学院,北京 100097;3.中国航空无线电电子研究所,上海 200241)
0 引言
近距空中支援是航空兵支援地/海面部队的一种作战行动,是针对接近己方的敌前沿和浅近纵深内直接影响到己方当前行动的敌目标进行的空中火力打击,可由固定翼飞机、旋翼飞机或无人机完成[1]。近距空中支援与争夺制空权、空中遮断并称为空军的三大作战任务,是现代空中作战的重要内容[2]。越南战争中,美空军近距空中支援任务出动量由1965 年的15%增至1966 年的50%,而且至战争结束一直保持在这个水平上[3];伊拉克战争中,美国中央司令部空军部队报告《“伊拉克自由”——数据见证》显示,此战役中攻击目标的79%属于近距离空中支援类[4]。
近距空中支援作战时,一般己方部队已与敌方交火,敌我双方犬牙交错,需要空地精确配合。然而支援飞机缺乏态势感知,对目标的搜索识别难度极大,因此,需要末端指挥和引导[5]。一般而言,负责火力召唤和目标引导的有两种人员:一种是地面的联合末端攻击控制员(joint terminal attack controller,JTAC),一般编制在陆军内,但多为空军人员,甚至是攻击机飞行员出身,以便更准取得指示投放弹药种类、攻击方向,尤其是弹着点的具体位置,使用无线电、光电信号、发烟装置等指示目标[6-7]。另一种是FAC(A),他是经过专门训练的合格空军军官,负责从空中为地面部队提供近距空中支援的飞机实施控制,FAC(A)在空中和地面部队之间建立了至关重要的联系[7-8]。
1 协同基本需求
1.1 美军机载前进空中控制员经验
美军在朝鲜战争和越南战争中,支援地面作战时大量使用高速作战飞机,发现目标、敌我识别和投入攻击都遇到了困难:要求实施近距空中支援的航空兵提供及时准确的战场和目标情报,实施更加灵活、更具体的指挥控制,然而地面引导员的指挥能力不能适应新的需求。原因在于:首先,其视距有限,即使能见度良好,从地面分清目标类型一般不大于5 km,在硝烟弥漫的战场上视距更近,无法对高速飞机实施准确引导;其次,由于他们经常在前沿执行任务,易受敌人优先攻击;受限于地形和机动性,即使乘坐坦克或者吉普车,也难以迅速机动到有利引导控制位置;最后,由于靠近敌军目标,容易被己方误伤。美军针对此问题,对支援地面作战的指挥控制体系做了新的尝试:在朝鲜战场上,他们让FAC(A)乘T-6 飞机从空中对攻击机实施指挥引导,很好地解决了地面引导员视距受限、机动范围/速度能力差和生存力低的问题。在越南和老挝战场上,又进一步广泛应用这一引导模式,积累了丰富的经验[5]。
美军在越南战场上得出了一条关于能不能成功实施近距空中支援的基本经验,即“90%取决于发现和识别目标是否迅速、准确”,而广泛使用FAC(A),取代传统的JTAC,是解决目标探测与识别问题的一项重要措施。尤其是在山岳、丛林、两栖地带,美军认为“控制突击活动唯一有效的方法是使用空中前控员”[5]。
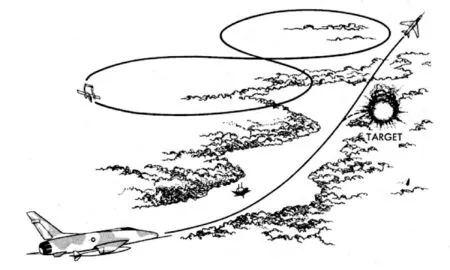
图1 FAC(A)在空中提供目标指示示意图Fig.1 FAC(A)provides target designation in the air
实践证明,FAC(A)克服了地面JTAC 机动和范围局限性,提供更灵活、更广泛的战场侦察、引导能力,可以在决定性的时间和地点协调更大规模的打击,能够抓住和利用转瞬即逝的优势窗口,且空中俯视视角一致,更有利于目标描述、理解、关联和确认。因此,空-空引导CAS 将会成为未来CAS 作战的主要形式。
1.2 无人机引导有人机执行CAS 可行性分析
在越南战争中,美军FAC(A)执行CAS 主要驾驶O-1、OV-10 观察机,虽然相比地面引导取得了显著的作战效能提升,但这种飞机当时缺少高性能侦察载荷设备,为了方便FAC(A)在空中目视侦察,飞行速度不能过快、高度不能过高,并且需要通过拉烟的方式向对地攻击机标示自己的航迹,很容易成为地面移动式火力或轻型防空火力的攻击目标,战场生存力堪忧。
随着装备水平发展,军用无人机的出现给空-空引导CAS 赋予新的生命力。它的优势在于能够遂行远程侦察监视、精确火力打击、目标指示和引导及通信中继等,具备行动隐蔽、机动性强、滞空时间长、经济性好、无人员伤亡风险等特点[9]。它的劣势在于携带的武器数量有限,也无法携带大量的武器弹药,无法满足多目标和坚固目标打击需求。
基于以上分析,有/ 无人协同CAS,即无人机充当FAC(A)角色引导有人机执行CAS,能实现优势互补,最大化满足新时代近距空中支援作战场景需求。
2 有/无人协同CAS 场景和流程
2.1 典型作战场景
当前作战背景是,红方在经过空优作战后成功抢夺局部制空权,红方无人机负责对地面实施前出侦察封控。然而,地面某部在向敌纵深区域推进过程中,遭到敌重集群火力点猛烈压制受阻,且无人机自身携带武器无法摧毁目标。遂由无人机地面控制站启动近距空中支援程序,如图2 所示。
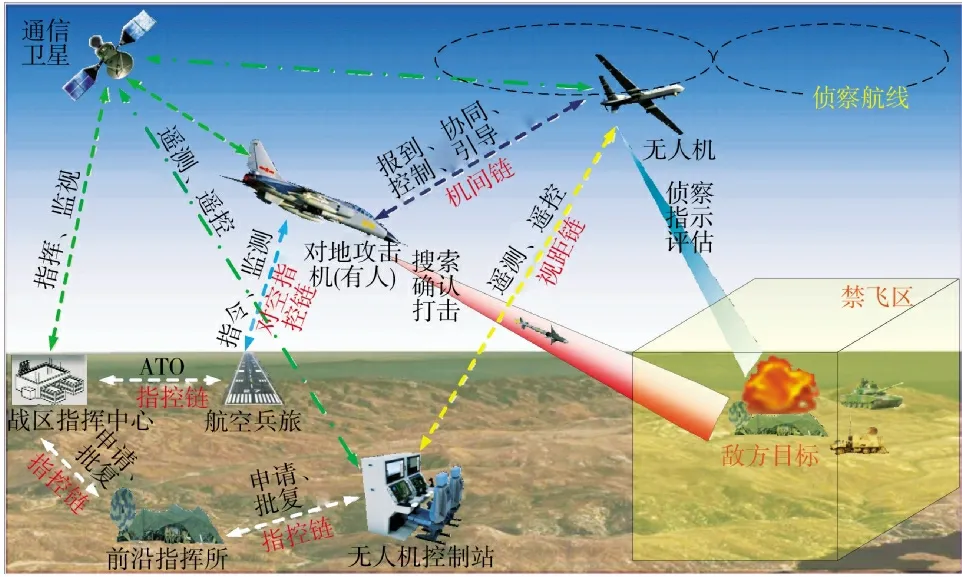
图2 有/无人协同近距空中支援典型任务场景Fig.2 Typical mission scenarios of manned/unmanned collaboration in close air support
2.2 任务流程
结合以上作战场景,有无人协同近距空中支援典型任务流程如图3 所示。无人机控制站控制无人机在战场任务区侦察,探测敌地面目标,完成对目标的成像、识别,对静目标完成测距定位,对动目标实现稳定跟踪;再由无人机控制站填报申请,并逐级上报指挥机构;上报指挥机构综合全战场任务申请、态势、兵力资源等,完成任务批复,并下达空中任务指令(air task order,ATO)至航空兵旅;航空兵旅及时响应作战需求,派遣指挥支援飞机前往任务区;有人机到达约定好的报到联络点(contact point,CP)[5,8]后,与无人机进行报到对接;尔后有人机和无人机协同执行近距空中支援任务;在完成打击后,有人机退出战场,从退出点(egress point,EP)[5,8]正式撤离目标区域,有人机的制空权将从无人机控制站移交到更大范围的地面指控机构;根据空中平台的剩余作战能力和任务需求视情调度,包括返航、指定空域待战或立即前往下一目标区执行任务等。梳理各阶段体系节点和分工如表1 所示。
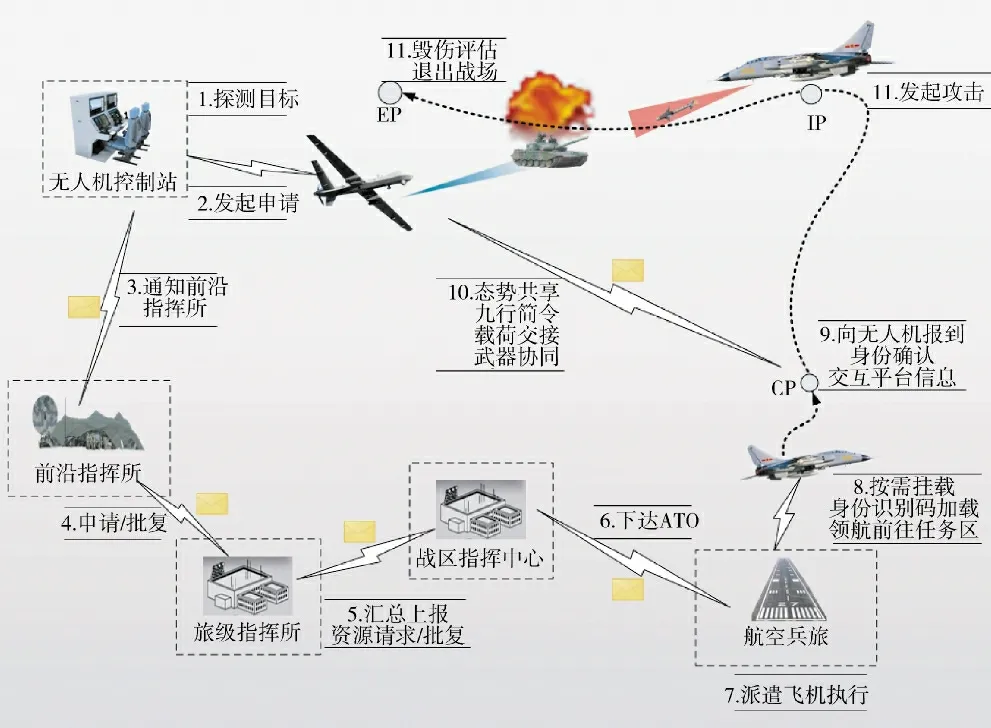
图3 有/无人协同近距空中支援典型任务流程Fig.3 Typical task flow of manned/unmanned collaboration in close air support
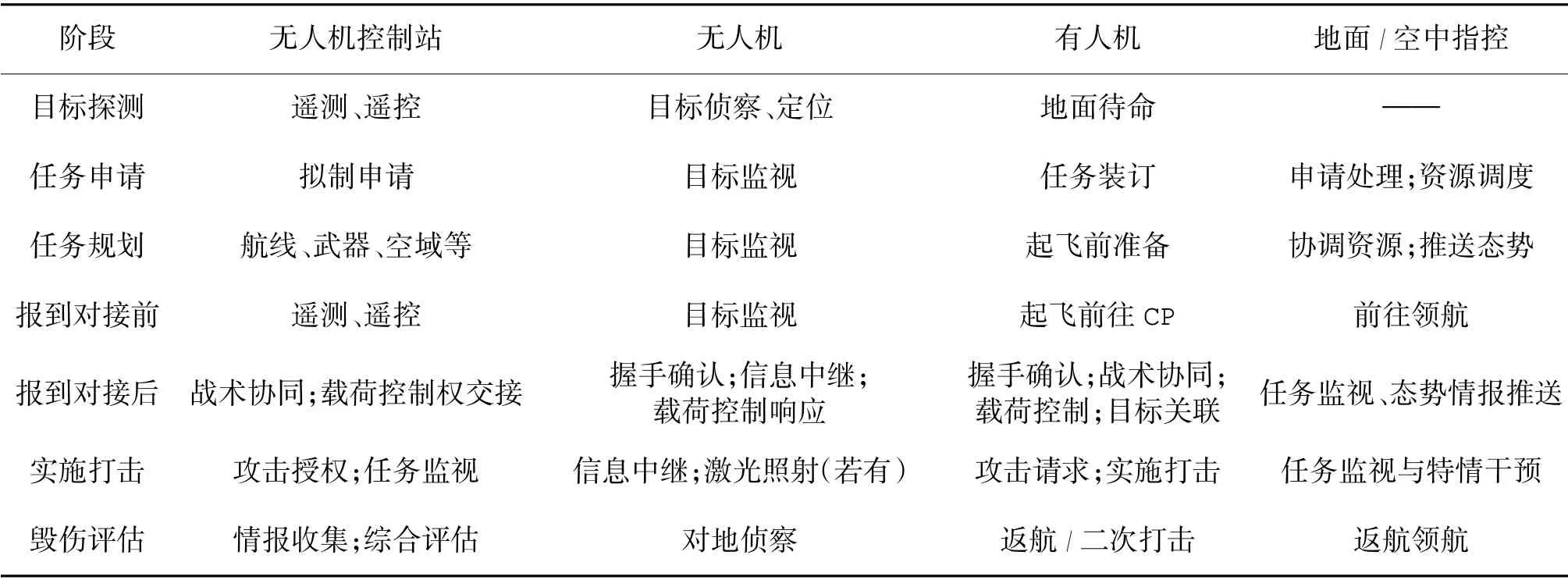
表1 作战体系节点组成及分工Table 1 Composition and division of combat system nodes
2.3 有/无人协同CAS 核心技术
聚焦近距空中支援末端协同实施阶段,有/无人协同流程和内容如下页图4 所示。
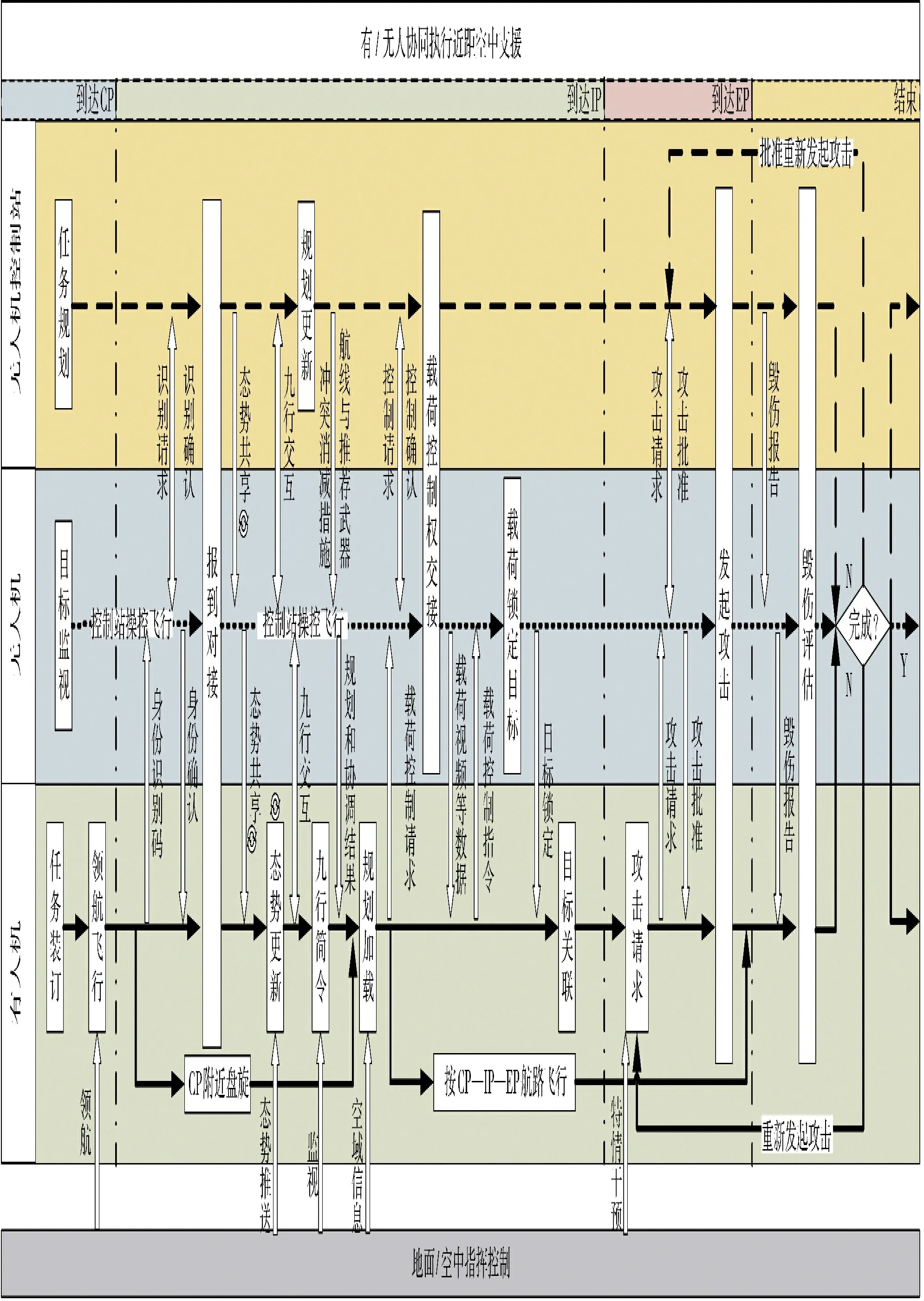
图4 有/无人协同近距空中支援战术末端协同活动Fig.4 Tactical terminal coordination activities of manned/unmanned collaboration in close air support
1)在有人机在地面/ 空中指控机构的领航下到达CP 点前,无人机控制站操控无人机对待打击目标实施持续监视,同步完成任务规划;
2)在到达CP 点后,有/无人机间实现第1 次通联,交互身份识别、作战任务、平台基础(武器、传感器、剩余油量等)等信息;
3)完成握手后,无人机持续推送战场态势情报信息,包括态势目标、地面火力计划、战场空域等;
4)交互事先拟制的标准九行简令[8],其中涵盖了末端攻击核心的战术协同内容,包括目标信息、最近友军位置、协议目标标识方式、攻击时间窗口等;
5)再由地面推送任务规划信息,包括末端攻击航线、武器使用推荐以及各种空域协调措施等;
6)在有人机完全理解本次近距空中支援任务后,有人机开始参照末端攻击航线飞行;
7)有人机请求控制无人机的吊舱,得益于相同俯视视角,帮助有人机迅速完成目标搜索和确认;
8)如使用激光制导等武器且采用“它照本投”模式,则还需交互攻击武器协同信息,包括激光编码、延迟照射时间等;
9)有人机到达攻击起始点(initial point,IP)[5,8]后,下发攻击请求,无人机实施攻击授权;
10)无人机持续战场监视并进行目标标识,包括激光照射、红外标识、投射特定颜色烟雾弹、燃烧弹等方式;
11)有人机完成弹药投射,退出前往EP 点,无人机控制站结合多源情报信息,并控制侦察载荷开展毁伤评估,生成毁伤评估报告,指挥有人机撤离战场或者发起二次打击。
在此协同过程中,须重点研究以下核心技术:
1)面向近距空中支援任务规划技术
任务规划,其目标就是通过系统运筹、合理规划,使得多批次、多种类的作战飞机协调配合、充分发挥自身功用,科学利用作战资源,完成作战任务,从而获得整体最佳作战效能[10]。因此,围绕CAS 任务,需要结合CAS 特殊需求重点解决3 个技术点:一是指挥机构面对多目标申请多机待战场景,完成目标-资源匹配关联,即任务分配,使总体作战效能最大化;二是地面指挥机构和无人机控制站指挥引导空中作战平台沿最安全、最高效的航路飞行;三是基于目标易损性和武器威力计算,完成基于毁伤效能评估的弹目匹配攻击方案规划。通俗地讲,即分别回答“谁打谁”“怎么去”和“怎么打”的问题。
2)基于“空间盒”空战场管控技术
CAS 作战中局部空域环境极为复杂,包括地面炮火、敌防空威胁、其他空中平台活动区等,各作战元素动态交错。空域管控和冲突消解对飞行器自身安全和协同作战效率提升极为关键。目前国内缺乏统一组织战场规划、快速动态精准调配、联合空中行动协同、临机用空需求协调等实际管控能力。掣肘联合作战能力提升。借鉴美军“Kill Box”思想[11],急需构建基于“空间盒”的空战场管控技术,按统一标准将全球栅格化,综合运用“区、线、道、点、层”5 种要素立体规划空战场,对各种空战场范围内其他用空活动实施统一计划和调控,参考统一标准,促进安全高效使用空域,消解冲突,提高作战效能。
3)跨平台载荷/飞行控制技术
传统地面JTAC 描述目标基于平视视角,与有人机俯视视角差异很大。然而侦察无人机具备高性能对地侦察能力,且作为任务需求提出方最清楚目标及周边的态势信息,因此,实现跨平台载荷控制,即无人机侦察载荷控制权移交给有人机,能使有人机飞行员能获取无人机的大高度俯视“视野”,进而能更快帮助有人机锁定目标。并且未来随着有/无人协同技术成熟度提升,还可将无人机飞行控制权交接给有人机,实现更高等级互操作,在近距空中支援作战中发展一系列新战术,甚至新的作战样式,包括无人机自主空优掩护有人机、无人机压制敌防空协同有人机突防、无人机自主对地补充攻击等战术。
3 总体实施思路
3.1 节点通联分析
节点网络化通联是实现战术协同的基本前提。有/无人协同近距空中支援任务涉及到的节点包括有人机、无人机、无人机地面控制站和指挥机构。无人机控制站与无人机之间有3 类通信,一类是通过视距链路与无人机进行测控数据传输,实现无人机监控;另一类是通过通信卫星中继与无人机进行测控数据传输,实现无人机监控;最后一类是通过UV电台与无人机机载无线电台中继的方式对外通信。无人机与有人机主要采用机间链进行通信,包括飞机报到报、态势更新报、九行简令/复述、载荷控制指令、载荷视频、请求/批准攻击、毁伤评估报等。无人机地面控制站、有人机采用指控链与各级指控机构进行通信。

图5 体系节点通联Fig.5 Connection relationship between system nodes
3.2 节点能力提升需求
在解决体系节点通联问题的基础之上,实施有/无人近距空中支援要求各体系节点在现有基础之上进行能力升级,主要包括有人机、无人机和无人机地面站。
3.2.1 有人机
一是加装机间链端机。能够与联合作战中心/前进指挥所进行空地通信,接收指控、情报等信息;能够与无人机进行空-空通信,实现有/无人协同;能够与地面引导员进行空地通信,兼容传统地面引导CAS;能够语音、数据、视频/图像并发传输,实现全方位信息化引导。
二是加装机载CAS 应用软件。能够通过机间链发送载机平台信息至无人机,包含位置、姿态、速度、风速、风向、武器类型、武器数量、武器状态、油量等,实现对有人机的状态监控;能够通过机间链接收目标信息、航路规划结果、友军位置、参考物信息、敌军情报信息、空域、气象信息、九行简令、态势更新、攻击授权、毁伤报告等,实现任务必要信息支撑;能够通过机间链接收无人机的位置姿态、吊舱状态数据并发送控制指令,快速完成目标关联;能够通过机间链发送飞机报到、九行复述、攻击请求等信息,完成战术协同;能够通过机间链进行自由电文通信能力,使系统具备更强的健壮性和兼容性;能够接收指挥所的CAS 作战任务指令以及其他指挥引导信息,满足更大范围的地面指控需求。
3.2.2 无人机
一是加装机间链端机。能够与有人机进行空空通信能力,实现有/无人协同;具备语音、数据、视频/图像并发传输的能力。
二是任务计算机升级。能够将机间链发送来的信息进行转换,通过视距链下发至无人机地面控制站;能够将控制站上行发送的CAS 信息进行转换,通过机间链发送至有人机;能够通过机间链接收并响应有人机吊舱设备的控制指令;能够通过机间链发送无人机的位置姿态、吊舱状态、吊舱压缩视频至有人机。
三是视距链升级。上行数据链升级语音、图片、吊舱控制指令、九行简令、规划航线、态势更新、攻击授权、毁伤报告等协议;下行数据链升级语音、载机平台信息、吊舱视频、飞机报到、九行复述、攻击请求等协议。
3.2.3 无人机控制站
一是加装CAS 应用软件。能够向指挥所发送CAS 任务申请并接收批复,实现任务链闭环;能够接收载机平台信息,包含位置、姿态、速度、风速、风向、武器类型、武器数量、武器状态、油量等,实现对有人机的状态监控;能够发送目标信息、航路规划结果、友军位置、参考物信息、敌军情报信息、空域、气象信息、九行简令、态势更新、攻击授权、毁伤报告等,支撑对地态势感知;能够将无人机吊舱控制权转接至有人机;能够根据目标信息进行武器毁伤效能预先评估,支撑打击后决策;能够进行近距空中支援末端航线规划,完成末端引导飞行;能够与有人机、指挥所进行自由电文通信。
二是视距链升级。上行数据链升级语音、图片、吊舱控制指令、九行简令、规划航线、态势更新、攻击授权、毁伤报告等协议;下行数据链升级语音、载机平台信息、吊舱视频、飞机报到、九行复述、攻击请求等协议。
4 结论
基于美军FAC(A)引导作战经验,无人机引导有人机执行近距空中支援样式,能充分发挥无人机机动性、大范围、高速度、以高制低、对地探测以及无人化的优势,满足未来军事需求。借鉴MBSE 系统工程思想,基于典型场景和任务链闭环流程分析,重点剖析末端协同实施阶段涉及的核心技术,并给出了有/无人协同近距空中支援的工程化实施思路,为有/无人协同近距空中支援体系能力建设提供技术支撑。
