基于双光源检测的烟雾多特征感知技术研究
2023-03-10丰颖
丰颖
(1.煤炭科学技术研究院有限公司,北京 100013;2.煤矿应急避险技术装备工程研究中心,北京 100013;3.北京市煤矿安全工程技术研究中心,北京 100013)
火灾是各类煤矿险情中最严重的灾害之一。矿井内一旦发生火灾事故,会产生大量有毒有害的高温烟气,对全矿及矿区人员的生命安全造成危害。因此,能否在火灾初期及时准确地发出预警,使井下人员有充足的时间采取措施,避免更大的人员伤亡和财产损失,具有至关重要的意义。目前,烟雾监测是矿井火灾早期预警的重要手段,当前矿井烟雾多采用离子式、光电式、气敏式等单一检测原理的烟感设备进行识别,然而煤矿井下煤尘多、湿度大、电磁环境复杂,单一检测原理的烟雾传感器容易出现误报或漏报的情况[1]。该文提出一种基于双光源检测技术的烟雾多特征感知传感器设计方法,在检测烟雾的同时,检测一氧化碳与温度,并将检测结果送入数据融合算法模型进行决策,实现矿井烟雾准确识别。
1 双光源烟雾检测技术工作原理
经过大量实验发现:不同物质在燃烧的前两个阶段产生的气溶胶集中分布在一段粒子直径范围内;同时,经过对大量气溶胶的粒径分析发现,导致火灾误报警的水汽和粉尘等气溶胶粒径远大于其他大多数物质热解的平均粒径。根据粒子光散射原理,在入射光功率一定时,颗粒物散射光强会随粒径和波长等因素变化,采用不同波长的光源,对不同粒径的颗粒物,其散射光强不同。因此,利用双光源检测技术,不仅可以进行烟雾浓度检测,还可以对烟雾的颗粒直径进行检测,以此来区分火灾烟与干扰源,减少误报的情况。
ADI 的一款集成光学模块ADPD188BI,利用不同光波长的特点,采用双波长探测颗粒物散射光强,通过区分不同大小的颗粒来排除干扰源。该模块在单个封装内集成了模拟前端(AFE)、两个LED 发射器(一个蓝光发射器、一个红外发射器)以及光电二极管——蓝色LED 波长470 nm 和红外LED 波长850 nm,这两个LED 在独立时隙发出光脉冲,射出的光碰到空气中的颗粒物,散射回光电二极管。通过双色光波长检测,除了支持单个波长的单独测量外,也支持分析比率构成,使得误报率进一步降低[2]。烟雾检测模块原理框图如图1 所示。

图1 烟雾检测模块原理框图
2 多源数据识别技术
2.1 矿井火灾烟雾的主要特征
物质整个燃烧过程主要分为三个发展阶段:热解、阴燃和明火,其中热解和阴燃是以释放气体和气溶胶为主要特征,释放的气体成分主要有一氧化碳、二氧化碳、氮氧化物等,释放的气溶胶俗称为烟雾,是物质燃烧时悬浮在空气中的微小颗粒物。另外,火灾发生时的另一显著特征为温度的迅速升高[3-5]。
2.2 多源数据检测
结合矿井火灾烟雾的主要特征,在研究烟雾颗粒识别、温度变化感知、气体浓度检测等多种烟雾特征信息识别方法的基础上,运用多源数据融合算法,最终实现烟雾的智能识别。烟雾探测器采用ADI 的集成光学模块ADPD188BI,温度感知元件采用集成半导体温度芯片DS18B20[6],一氧化碳检测元件采用英国城市的4 CM 系列元件[7]。
2.3 硬件电路设计
多特征感知烟雾传感器由多源数据感知电路(包括烟雾检测模块、一氧化碳检测模块、温度检测模块组成)、显示模块、通信模块、报警模块等组成。各参数检测模块将采集到的信号转换成标准的模拟或者数字信号上传至微控制器,经过微控制器处理后,实现显示、报警、传输等功能[8]。传感器使用STM32F103C8T6 作为微控制器,硬件电路框图如图2 所示。
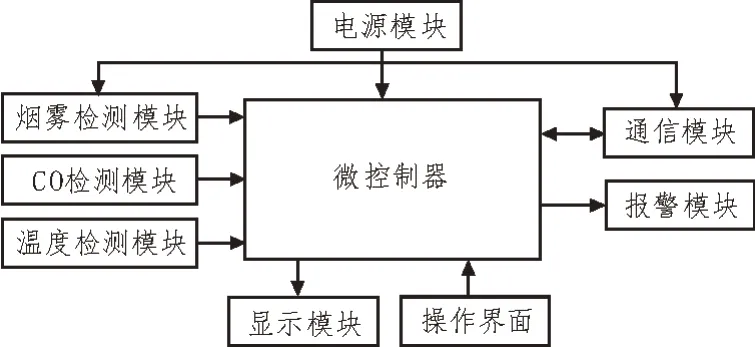
图2 烟雾多特征感知硬件电路框图
烟雾检测模块采用光学模块ADPD188BI,电路原理图如图3 所示。
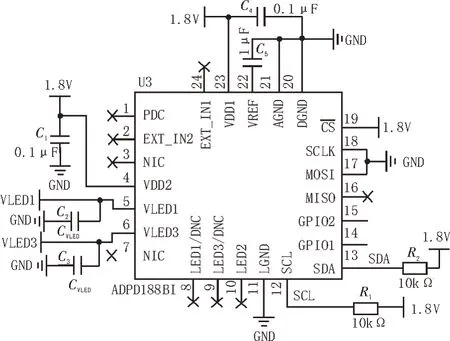
图3 烟雾检测模块电路原理图
一氧化碳检测模块电路原理图如图4 所示。

图4 一氧化碳检测模块电路原理图
温度检测模块采用DS18B20 温度感知元件,其通过单总线通信协议与微控制器进行通信。
3 多源数据融合算法
3.1 D-S证据理论基础
在D-S 证据理论中,用Θ表示一个样本空间,其被称为一个辨别框架。Θ由一系列两两相斥的对象Ai构成,且Θ包含当前要识别的全体对象,即Θ={A1,A2,…,An}。证据理论的基本问题是:已知辨识框架Θ,判明测量模板中某一未定元素支持Θ中某一Ai的程度[9]。
令Θ为一论域集合,2Θ为Θ的所有子集合构成的集合,称为m:2Θ→[0,1]为基本概率分配函数,它满足如下定理:
式中,P(Θ)为Θ 的所有子集;m(A)为证据对命题A的支持程度;m(∅)为证据对空集的支持程度。
D-S 证据理论的基本策略:将证据集合分成2个以上(包含2 个)不相关的元素,然后用它们来独立判断辨识框架,再结合Dempster 合成规则将它们组合起来,Dempster 证据合成公式如式(2)所示[10-13]:
其中,证据之间冲突程度如式(3)所示:
式中,Ai,Aj,Al为Θ的子集;m1(Ai) 为证据1对命题Ai的支持程度;m2(Aj)为证据2 对命题Aj的支持程度;m3(Al)为证据3 对命题Al的支持程度。
但是,当证据间发生高度冲突时,用原始的D-S合成规则进行数据融合,无法得到有效的决策结果,在实际应用中,需要对其进行改进。该文将证据冲突程度k按q(A)(证据对A的平均支持度)分配给A,即把证据冲突概率按各个命题的平均支持程度加权进行分配[14-16]。
改进后的合成公式为:
其中,证据对A的平均支持度为:
式中,n为证据条数;mi(A)为证据i对命题A的支持程度。
3.2 数据融合算法在烟雾检测中的应用
根据火灾是否发生,确定识别框架Θ={A1,A2},其中A1代表有火灾,A2代表无火灾。
根据式(3),火灾发生的概率为:
其中,证据间的冲突因子为:
证据对A1的平均支持度为:
式中,ms(A1)为烟雾检测模块支持有火灾的概率;ms(A2) 为烟雾检测模块支持无火灾的概率;mt(A1)为温度检测模块支持有火灾的概率;mt(A2)为温度检测模块支持无火灾的概率;mc(A1)为一氧化碳检测模块支持有火灾的概率;mc(A2)为一氧化碳检测模块支持无火灾的概率。
当烟雾检测模块检测到烟雾浓度大于5% obs/m时,ms(A1)为1,ms(A2)为0,反之,ms(A1)为0,ms(A2)为1。一氧化碳及温度两个参数支持火灾发生概率的确定依赖于检测模块自学习得到的经验数据库。将传感器置于测试环境中,在有烟及无烟的状态下,获取一定数量的经验数据。
温度支持火灾发生的概率为:
式中,nt为温度小于或等于当前温度下经验数据库中发生火灾的次数;N为经验数据库中发生火灾的总次数。
一氧化碳浓度支持火灾发生的概率为:
式中,nc为一氧化碳浓度小于或等于当前一氧化碳浓度下经验数据库中发生火灾的次数;N为经验数据库中发生火灾的总次数。
3.3 数据融合算法软件流程设计
软件的主要功能包括初始化,敏感元器件自检,数据采集、计算、融合,数据显示、上传和声光报警[17-18]。烟雾多特征感知传感器软件流程图如图5 所示。

图5 烟雾多特征感知传感器软件流程图
4 基于D-S证据理论融合算法的实验验证
实验分为三个场景进行验证:①实际有烟的情况下,传感器漏报率;②水汽、粉尘较大的环境下,传感器的误报率;③现场工业实验。前两个场景各进行10 组实验,实验结果如表1 和表2 所示,工业实验选取5 处粉尘、水汽较大的井下环境进行,实验结果如表3 所示。
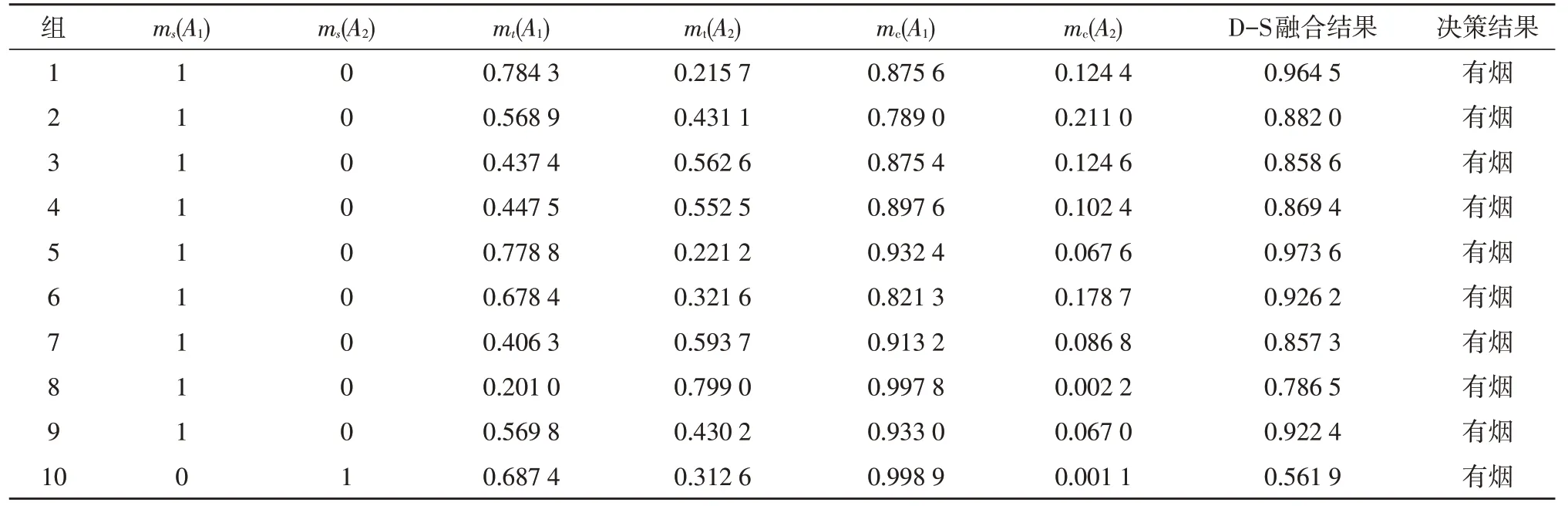
表1 实际有烟状态下D-S融合结果
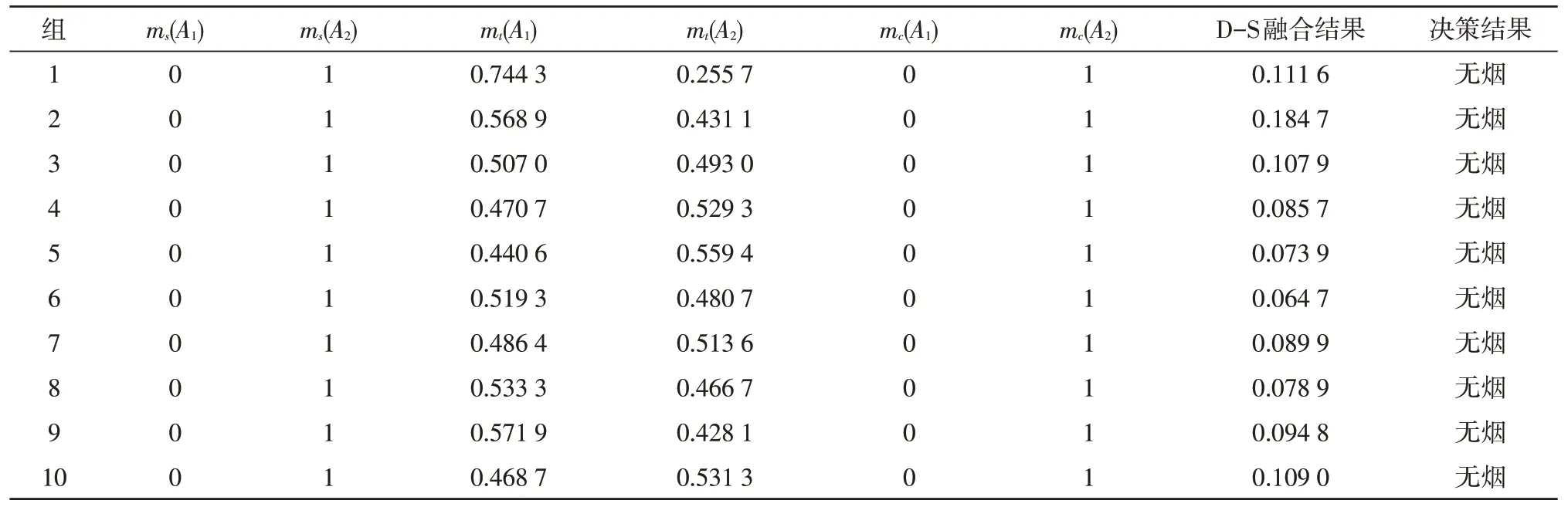
表2 水汽、粉尘环境下D-S融合结果
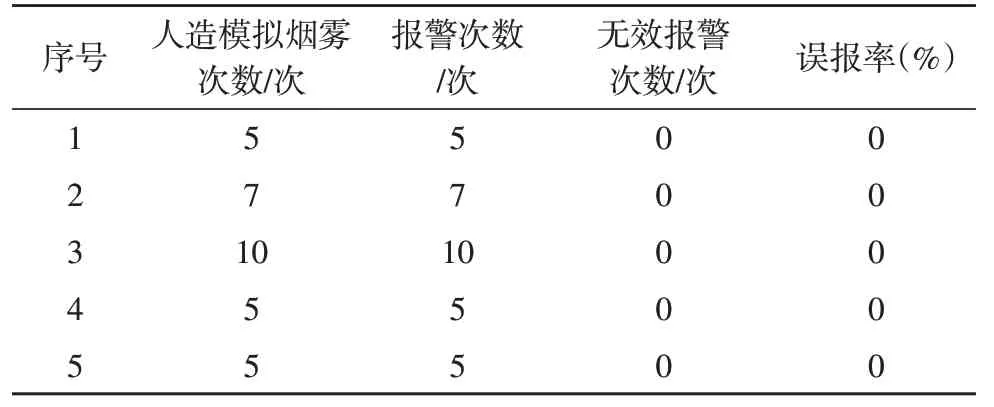
表3 工业实验结果
4.1 实际有烟的情况下,传感器的漏报率
实际有烟的情况下,各检测模块对火灾发生支持概率及D-S 融合结果如表1 所示。
表1 表明:①烟雾检测模块正常工作的情况下,可以准确判断环境中存在烟雾;②D-S 融合算法得到的决策结果与实际情况相符;③第10 组实验模拟烟雾检测模块损坏,实验结果表示,在烟雾检测模块失效的情况下,D-S 融合算法也能得到正确的结果。
4.2 水汽、粉尘环境下,传感器的误报率
1-5 组实验为将传感器悬挂于加湿器上方进行,6-10 组实验为将传感器置于粉尘风洞中进行,各检测模块对火灾发生支持概率及D-S 融合结果如表2 所示。
表2 表明:①烟雾检测模块在水汽、粉尘较大的环境下,可以准确区分水汽、粉尘与烟雾颗粒,无误报警情况出现;②D-S 融合算法得到的决策结果与实际情况相符。
4.3 工业实验
选取粉尘、水汽较大的矿井皮带运输转载机头5处作为实验地点,进行为期6 个月的工业测试,实验结果如表3 所示。
表3 表明:5 处实验点的烟雾传感器报警均由人造模拟烟雾引起,无效报警次数均为0 次,基于双光源检测技术的烟雾多特征感知传感器烟雾识别的准确率为100%。
5 结束语
通过实验室及现场工业实验验证:基于双光源检测的烟雾多特征感知传感器在粉尘、水汽较大的环境下,能有效排除环境中干扰因数,烟雾识别准确率为100%;而且,在烟雾检测模块失效的情况下,即当烟雾检测模块与一氧化碳检测模块、温度检测模块的判决结果出现高度冲突时,改进后的D-S 融合算法亦能正确判别烟雾存在与否。
