基于实测数据回放的ROV导航定位系统研究
2023-03-09李学成谢阳光伊国兴
李学成,谢阳光,张 舸,伊国兴
(1.中海辉固地学服务(深圳)有限公司,广东 深圳 518067;2.中国航空工业集团公司西安飞行自动控制研究所,西安 710065;3.哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨 150001)
0 引言
水下导航定位是海洋石油工程的基础信息,如水下结构物位姿测量[1-2]、遥控无人潜水器(Remote Operated Vehicle,ROV)巡检高精度定位定向等[3-5]。离开水下导航定位将无法开展水下施工作业。当前我国海洋石油工程水下定位装备、技术支持、售后服务主要来源于西方海洋强国,核心关键装备没有实现全国产化。随着中美贸易战的持续进行,关键水下定位装备与技术受到禁运,对我国海洋开发造成严重威胁。
当前,我国在渤海、东海和南海陆续建成400多条海管,累计长度已超过7000km。已有管缆的准确在位状态检测对于后续防护工程开展具有重大意义。深海ROV是水下作业利器,通过携带各种传感器,可广泛应用于水下设施安装、检测维修等海洋开发作业。ROV在浅水区检测定位传感器采用超短基线定位系统(Ultra-Short Baseline,USBL)+水下罗经;在深水区检测定位传感器采用USBL+水下罗经+多普勒计程仪(Doppler Velocity Log,DVL),数据融合在ROV母船进行。该定位系统长期没有高可靠的国产化设备及软件支持,为海工装备“卡脖子”的关键技术之一。
在水下导航方面,张涛等提出了基于声学浮标辅助惯导的水下定位方案[6];Ma X.等提出了基于因子图的多源信息融合算法[7];M.Franchi等提出了一种基于自适应无迹卡尔曼滤波器的DVL和前视声纳组合方案[8];Li W.等提出了基于神经网络的捷联惯导和DVL组合导航方案[9];S.Suresh等提出了基于多波束声纳的水下同时定位与建图(Simultaneous Lo-calization and Mapping,SLAM)方案[10]。在数据回放仿真方面,梁云涛等提出了基于vieWTerra平台构建的船舶航行数据回放方案[11];Jin X.等提出了基于真实回放信号的导航终端测试方案[12];Yan F.等提出了岸基雷达的海上回波数据仿真系统[13];C.Cristodaro等提出了全球卫星导航系统(Global Navigation Satellite System,GNSS)的数据回放测试方案[14]。水下导航定位算法的多样化为ROV水下作业提供了丰富的数据来源,与此同时将实测数据的回放仿真与水下组合导航算法相结合,可以极大程度提高算法调试效率。
本文针对ROV导航定位系统需求,通过对ROV导航定位需求进行总结,构建系统框架,研究融合算法,形成工程样机,并在实际扫管作业中进行验证,为实现全国产化ROV导航定位系统提供坚实基础。
1 ROV对导航定位系统需求概述
以某型ROV进行南海某水深300~1200m石油管线巡线调查为背景,巡线调查主要载体与设备系统资源有DP定位工作母船、深水工作级ROV、水面定位导航系统、水下定位导航系统、事件记录系统、视频记录系统、实时数据采集系统和数据处理系统等。巡线调查的目的为查清管线在位状态、路由位置、水深、障碍物及管线损伤情况、管线附属结构基本信息等。主要设备系统与应用方式如图1所示。
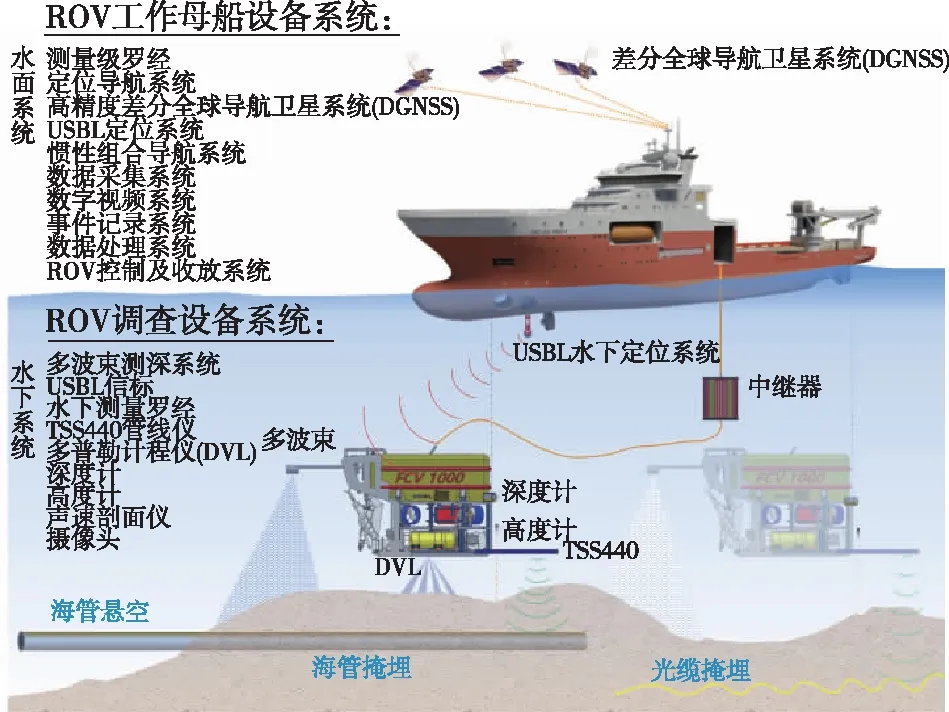
图1 ROV作业场景及配置示意图
该任务场景对水下导航定位需求如下:定位精度优于1m;定向精度不低于2°;姿态精度不低于0.2°;定位数据平滑无噪声;数据输出频率不小于1Hz。
基于声学定位系统良好的工作性能,USBL与长基线(Long Baseline,LBL)定位系统在水下工程作业中得到了广泛应用,但独立的LBL与USBL均无法满足本任务场景需要。LBL定位精度高,精度不受水深影响,但定位控制范围有限,适合工程安装作业而不适合长距离定位导航作业。USBL应用方便,可快速部署到作业地点,但精度随水深增加而降低。经评估,本作业场景下,USBL独立定位精度为1.5~6m,数据输出频率1~2Hz,无法满足巡检导航定位需求。
为满足水下定位导航要求,本文研究了USBL辅助下的组合惯导定位系统,为ROV管线巡检提供基础位置数据信息,研究涉及ROV搭载的传感器主要有USBL信标、水下测量罗经、DVL及深度计。上述传感器原始测量数据通过ROV脐带缆传输至DP母船,导航数据融合终端在母船实现。
2 ROV导航定位框架设计
如图2所示,导航定位系统框架主要包含嵌入式运行模式、仿真运行模式和数据分析模块三部分。

图2 实测数据回放导航系统结构示意图
2.1 嵌入式运行模式
嵌入式运行模式是在ROV的嵌入式导航计算机中的工作模式。在该模式下,导航系统工作在真实的水下环境中,主要进行导航信息解算和原始信息存储两项任务,如图3所示。
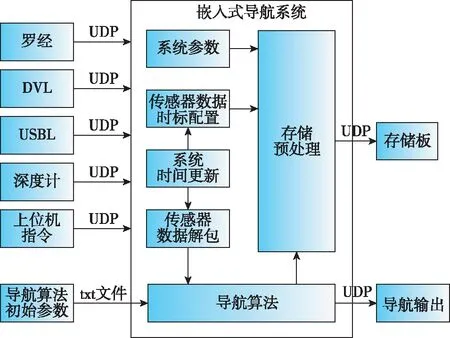
图3 嵌入式运行模式示意图
该模式下,系统输入主要为传感器数据、上位机指令和导航算法参数三大类。罗经、DVL、USBL和深度计是ROV接入的传感器,分别为ROV提供量测的姿态角信息、对地速度信息、位置信息和深度信息;上位机指令是水下试验过程中,上位机发出的包括算法复位、模式切换、参数赋值等在内的指令,是ROV工作环境的一部分;导航算法参数是包括量测噪声、过程噪声、状态变量和协方差阵初始值等在内,会一定程度上影响算法稳定性、快速性和精度的参数。
传感器数据和上位机指令以用户数据包协议(User Datagram Protocol,UDP)接入系统,以系统内部时钟为基准对以上信息进行时标配置,同时根据各传感器协议进行解包。导航算法以初始参数和传感器数据为输入,实时解算ROV的定位信息并输出。传感器原始数据和解算的导航数据均被导航系统合并保存,以UDP输出至存储板形成实测数据文件。
2.2 仿真运行模式
仿真运行模式是在仿真计算机中的工作模式。在该模式下,导航系统工作在以回放数据为基础的模拟环境中,主要进行水下试验的数据复现和导航算法的调试更新仿真两项任务,如图4所示。
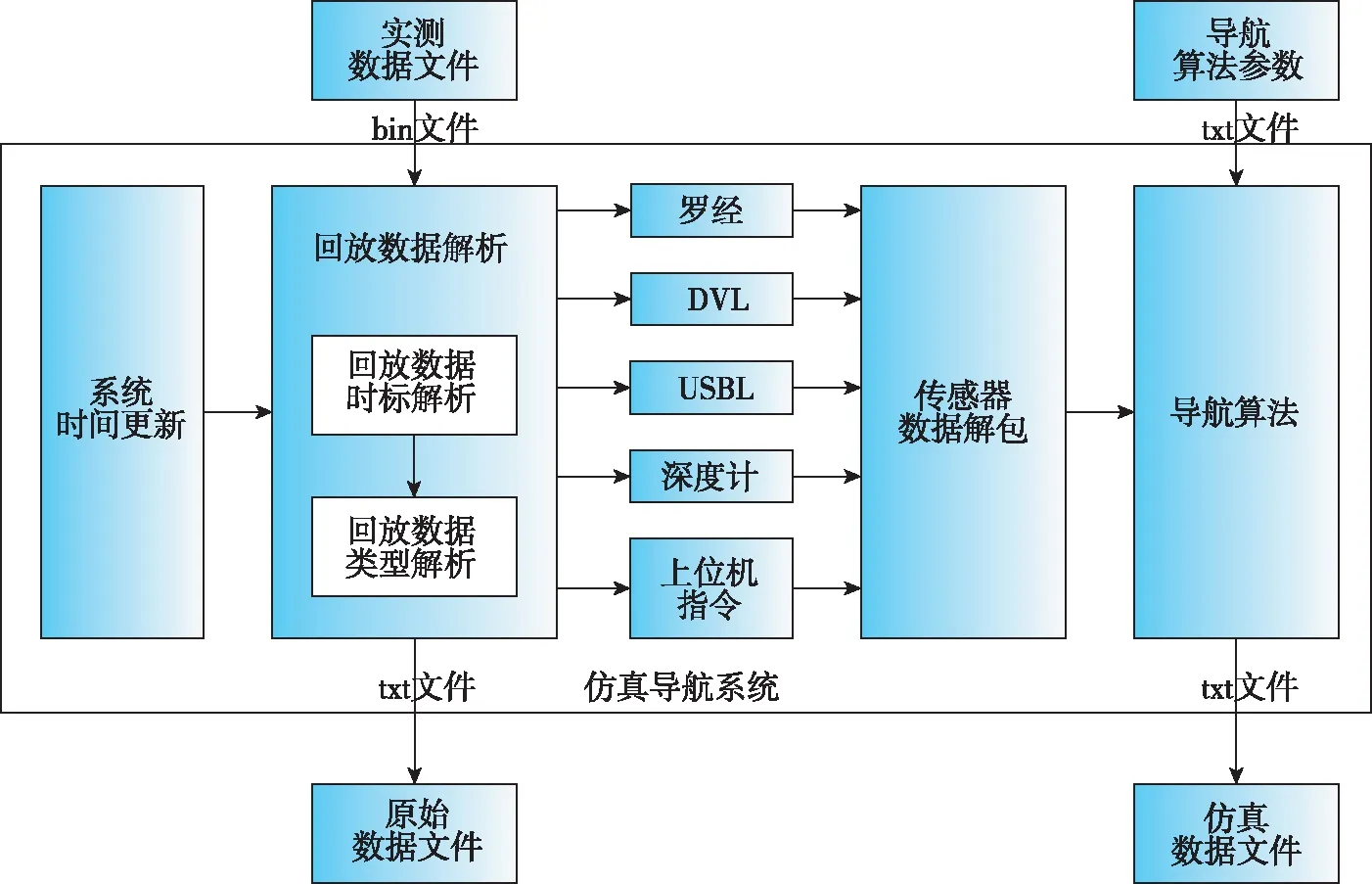
图4 仿真运行模式示意图
该模式下,系统输入为导航算法参数和嵌入式运行模式中输出的实测数据文件。实测数据文件中主要包括原始传感器数据、上位机指令以及嵌入式运行模式下的系统状态及导航输出等内容。
仿真导航系统具备与嵌入式导航系统相同的时钟基准,并以该基准对实测数据文件进行回放数据解析,将同步于当前时钟的实测数据释放,还原相应的传感器原始数据以及嵌入式运行模式下的导航输出数据。仿真导航系统与嵌入式导航系统的核心部分完全一致,共用相同的传感器数据解包模块和导航算法模块,保证了仿真复现精度。
与嵌入式运行模式不同的是,仿真运行模式没有进行基于时标的数据存储,而是输出一系列基于原始数据和仿真数据的文件,这些文件包含以系统时钟为基准的各个时刻的传感器数据、航位推算数据、组合导航数据和导航算法状态变量等信息,为数据分析模块提供丰富的数据来源。
2.3 数据分析模块
数据分析模块是运行在数据分析计算机上的软件,为仿真运行模式下输出的一系列数据文件提供可视化分析结果。
图5所示为数据分析模块的界面截图。根据功能的不同,主要分为数据模式选择、传感器数据显示和导航算法分析三部分。数据模式分为原始数据和仿真数据,分别对应仿真运行模式下输出的原始数据文件和仿真数据文件,反映了嵌入式导航系统和仿真导航系统下的导航结果。传感器数据显示区的不同按钮可以绘制罗经、DVL、USBL和深度计的数据曲线,同时USBL按钮还能够绘制ROV平面运行轨迹。导航算法分析区可以绘制航位推算和基于卡尔曼滤波的组合导航的位置图像和平面运行轨迹,并以USBL为基准进行算法的误差解算,同时能够显示状态变量和协方差阵主对角线元素在滤波过程中的迭代情况,为算法调整和参数优化提供参考信息。
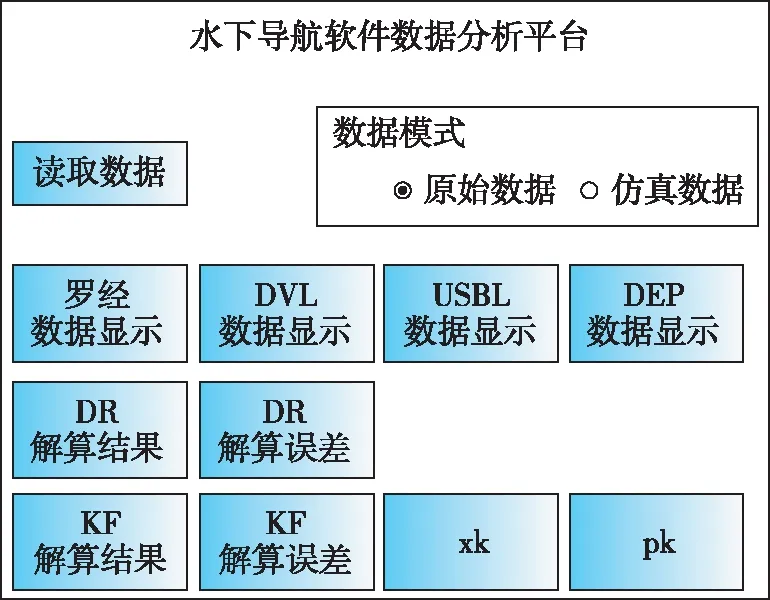
图5 数据分析模块界面截图
3 ROV组合导航算法研究
3.1 航位推算

(1)
通过DVL获得ROV在机体坐标系下的三轴线速度Vb,考虑速度量测噪声WDVL是均值为0的高斯白噪声,可以计算得到ROV在导航坐标系下的速度Vn,如式(2)所示
(2)
根据导航坐标系下的速度可以计算得到经纬度变化率,如式(3)所示
(3)
因此,经纬度迭代过程如式(4)所示
(4)

3.2 组合导航
图6所示为基于卡尔曼滤波的组合导航原理图,罗经和DVL进行航位推算迭代,航位推算的位置与USBL和深度计的位置作为卡尔曼滤波器的输入进行组合导航,解算其位置误差并以该误差对航位推算结果进行校正,进而作为组合导航位置进行输出。
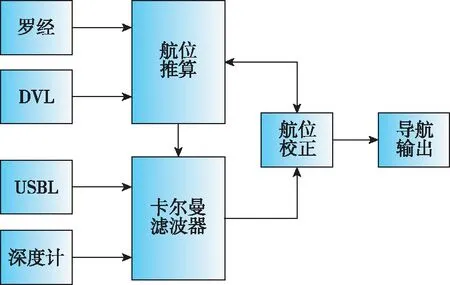
图6 组合导航原理图
以纬度、经度和高度误差作为状态变量,则组合导航的系统方程为
(5)
(6)
以USBL与航位推算的经纬度之差和深度计与航位推算的高度之差作为观测量,则量测方程可以表示为

(7)
根据卡尔曼滤波的计算公式进行迭代并实时进行航位校准,则可以计算得到组合导航位置。
4 测试验证
基于上述系统框架及算法研究,研制了ROV导航定位系统工程样机,如图7和图8所示,包含导航融合终端软件及全国产化的光纤罗经。

图7 ROV导航传感器配置

图8 导航数据融合终端
4.1 海试验证
2021年11月,在南海某海域利用某型ROV进行导航定位系统测试验证试验,现场配置状态如图7所示。现场用于试验的配套系统与传感器主要有USBL(Sonardyne Range2 HPT5000)、DVL(RDI 1200kHz navigator )及深度计(Tretech Seaking Bathy)。
以其中一例扫管试验为分析对象,实测数据输出如图9~图12所示通过图12组合输出结果可以看出,相比USBL输出,组合导航输出结果更加平滑。通过曲线拟合方式,去除趋势项后,USBL剩余噪声方差为5m,组合导航剩余噪声方差为0.8m,通过组合压制了80%定位噪声。
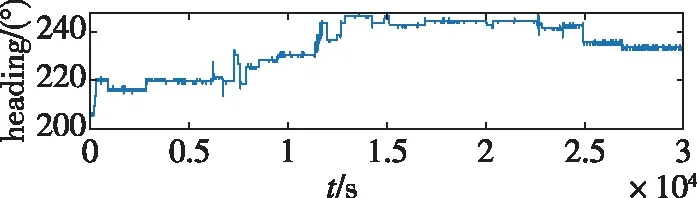
图9 罗经航向角数据
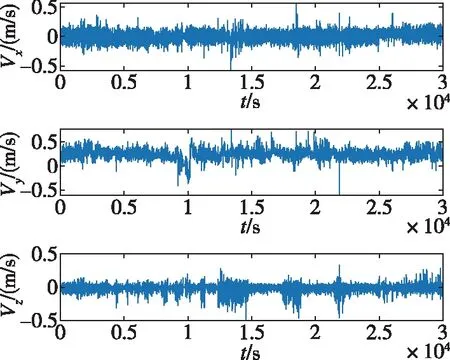
图10 DVL三轴速度数据

图11 USBL定位数据
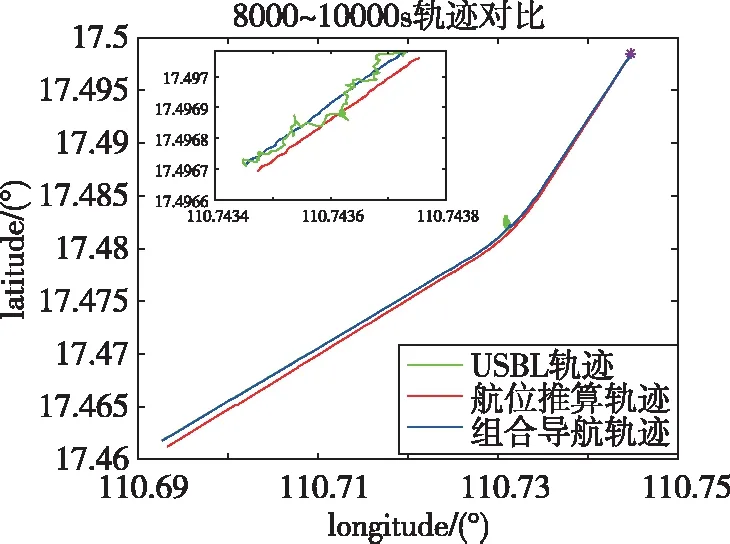
图12 组合导航输出结果
试验测试过程中1000s时间段内,ROV坐底观察,USBL输出大量野值,组合系统输出稳定,表明系统能够有效应对USBL输出异常。
4.2 成图验证
为检验本导航系统的有效性,通过商用综合导航系统Starfix.NG分别记录ROV载体USBL数据和本组合导航系统输出的位置数据,并在多波束数据处理时分别应用两组数据作为对比。
实测数据表明,本组合导航系统可以在保证数据平滑的基础上,获得较高的定位精度,组合系统能够有效平滑USBL量测噪声,并能够有效去除USBL受到遮挡及干扰时输出的野值点,数据输出频率达10Hz,如图13所示。同时,将本组合导航系统输出的位置数据应用于多波束数据处理也获得了更细腻的细节表达,如图14所示,调查所得数字地形模型能够更真实地反映管线在位状态及海底地形,对水下高精度调查具有巨大提升作用。
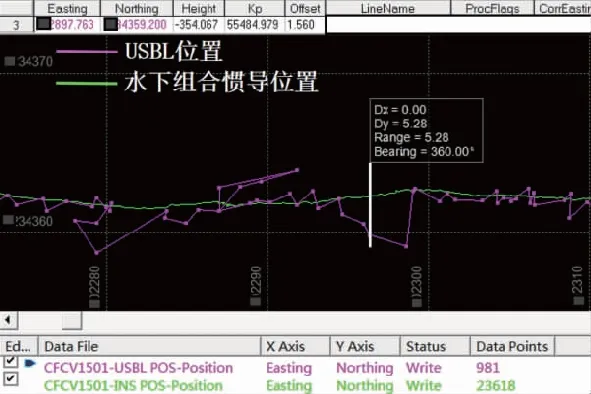
图13 实测水下组合惯导与USBL位置对比
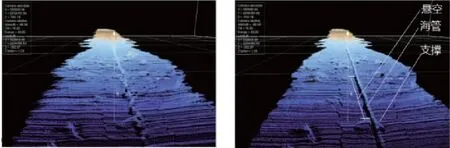
(a)应用USBL时三维视图 (b)应用组合惯导时三维视图
5 结论
针对ROV水下生产作业对导航定位系统的需求,研制了包含导航融合终端软件及全国产化光纤罗经在内的ROV导航定位系统工程样机,并进行了海上工程应用验证,结果表明:
1)构建的包含嵌入式运行模式、仿真运行模式和数据分析模块三部分的水下导航数据融合开发系统框架可靠有效,解决了水下导航算法研究过程中算法优化对试验数据的一致性要求和水下试验成本高、难度大、机会少的问题,极大地提高了水下导航算法研究的工作效率。
2)系统工程样机设计合理,系统能够根据时标准确记录并回放ROV的工作环境、系统状态和导航输出,为ROV的故障分析提供数据支持;能够根据实测数据的回放进行调试仿真,在保证外部环境一致的前提下,调试导航算法参数,为水下导航算法优化提供便捷的途径;此外,能够根据实测数据的复现和调试仿真的输出进行可视化结果分析,直观地显示试验过程数据以及导航算法的调试效果,为水下导航系统提供高效的交互方式。
3)基于USBL、水下罗经、深度计和DVL的组合导航是提高ROV水下作业定位精度的有效手段,能有效克服状态发散,实现长时间高精度的水下导航定位。工程样机实测中,对USBL噪声实现80%抑制,并辅助多波束实现高清成图,表明该工程样机初步满足设计要求,具备海上商业化运营条件。该系统的应用可显著提高水下定位精度,拓宽ROV调查作业水深范围,同时大大改善ROV水下安全作业条件,辅助ROV应对复杂的水下作业环境。
本研究投入小、成本可控、效益高,具有广阔的应用前景,可广泛应用于海上铺管预调查、铺管后调查、管线挖沟后调查、管线掩埋调查及海上设施安装等ROV水下生产作业。但同时也应看到,水下环境复杂以及施工方式多变,系统存在待优化空间,主要为:
1)声学导航设备极易受到干扰,提升声学导航数据预处理能力,抑制噪声,剔除野值是提升系统性能的最有效手段;
2)DVL对地速度数据是组合导航的重要组成部分,DVL的安装角度误差与比例因子的获取是提高导航精度的关键;
3)当前ROV作业导航定位系统信息直接提供给成像设备进行辅助成图,信息单向流动,如导航定位系统与成像传感器构成SLAM系统,将能够极大提升ROV作业性能。
基于上述认识,未来在系统性能提升方面可从以上三方面实施。
