鸭式布局气动耦合问题研究
2023-03-09张立坤赵苑辰王锁柱
张立坤,李 巍,赵苑辰,王锁柱,郭 阳
鸭式布局气动耦合问题研究
张立坤,李 巍,赵苑辰,王锁柱,郭 阳
(北京航天长征飞行器研究所,北京,100076)
鸭式布局指空气舵位于飞行器前部,与正常式布局相比,鸭式布局空气舵的控制效率高、响应快、升阻比大,可以实现飞行器较小外包络尺寸约束下的强机动、高过载需求。同时,鸭舵尾迹作用在弹身/尾翼上产生较强的三通道气动耦合问题。通过对鸭舵控制三通道耦合机理的研究,针对鸭舵控制耦合的问题给出工程解决方案。
鸭式布局;旋转尾翼;组合舵偏
0 引 言
鸭式布局是指空气舵位于弹身前部、弹翼位于弹身尾部的气动布局形式,广泛应用于制导火箭弹气动设计中,如美国的APKWSII与GMLRSXM31制导火箭弹、美国与阿联酋合作的魔爪激光制导火箭弹、以色列的EXTRA制导火箭弹以及中国多型远程制导火箭弹。
鸭舵尾流流动在细长体弹身上形成较大的影响区,气动设计时需要特别关注两点:鸭舵滚转控制时产生的滚转反效甚至失效的问题;鸭舵俯仰-偏航控制通道耦合的问题。本文从鸭舵控制耦合机理研究以及工程解决方案两方面进行阐述。
1 鸭舵叉式布局定义
定义4个空气舵周向分布与体轴系一致为“十式布局”、与体轴系夹角45°为“叉式布局”。叉式布局的俯仰、偏航、滚转控制均由4个舵参与,正舵偏如式(1)。

图1为叉式布局俯仰-偏航-滚转舵偏。

图1 叉式布局俯仰-偏航-滚转舵偏
2 鸭舵滚控诱导反滚的问题
采用鸭舵进行滚转控制时,鸭舵尾流在弹身/尾翼上产生诱导滚转力矩,量值与马赫数、攻角、舵偏角相关,特别是跨声速段,诱导滚转力矩还会“反号”,产生正的滚转力矩,当诱导反向滚转力矩量值大于滚转控制力矩时,就会造成飞行器的滚转失控。
图2、图3为鸭舵滚转舵偏+2°时沿弹身的流线和压力云图,正滚转舵偏产生绕轴负向滚转力矩;鸭舵尾流沿弹体存在横向流动,并在尾翼上诱导绕轴正向的滚转力矩。
文献[1]至文献[3]对鸭舵滚控反效问题进行研究,解决方案主要有以下几种[1~3]:调整鸭舵位置、优化鸭舵后缘后掠角等,减弱鸭舵下洗流诱导滚转力矩;在尾翼上增加联动副翼、环型或T型翼面、翼梢陀螺舵(如图4所示)等,减小尾翼上的反向滚转力矩。
采用自由旋转机构使尾翼与弹身在滚转方向解耦,尾翼上的诱导滚转力矩不会传递到弹身,有效地解决了鸭舵滚控反效的问题。图5为某自由旋转尾翼的结构。文献[4]研究表明,自由旋转尾翼不仅起到消旋的作用,对飞行器纵向气动特性影响也小。
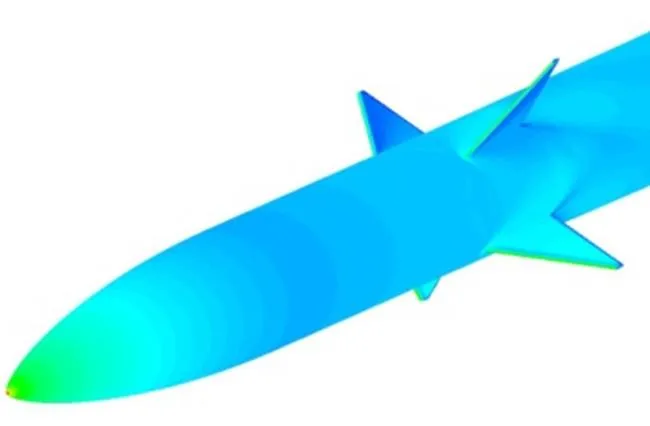
图3 鸭舵滚控压力云图

图4 翼梢陀螺舵

图5 自由旋转尾翼
通过风洞试验验证鸭舵滚控时采用旋转尾翼的消旋效果。对比相同来流状态下,尾翼固定与尾翼自由旋转的滚转力矩,如图6所示。由图6可以看出,由于鸭舵尾流在尾翼处产生反效滚转力矩,尾翼固定时滚控力矩比自由旋转尾翼降低一半,采用自由旋转尾翼消除鸭舵诱导反滚力矩的效果明显。
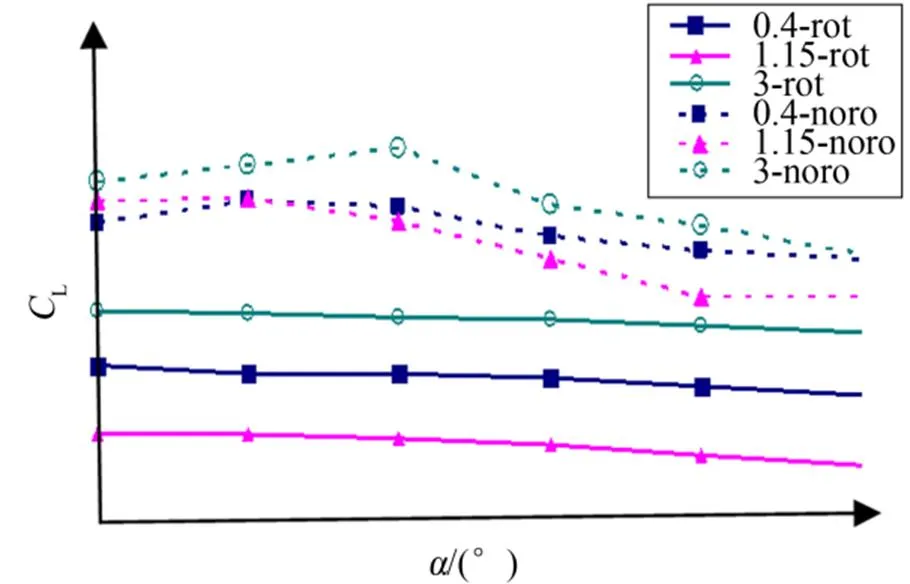
图6 滚转力矩系数
3 俯仰-偏航通道耦合
3.1 鸭舵控制通道耦合机理
采用鸭舵进行俯仰控制时,有侧滑情况下,鸭舵尾迹在弹身上产生航向非对称诱导力矩[5,6]。采用CFD仿真方法研究鸭舵控制通道耦合的机理。
图7为鸭舵尾流在弹身产生的影响区,由图7可看出,鸭舵尾流沿弹身向后流动,同时存在横向压差流动,因此,细长体弹身积分将产生较大的横、航向诱导力矩。
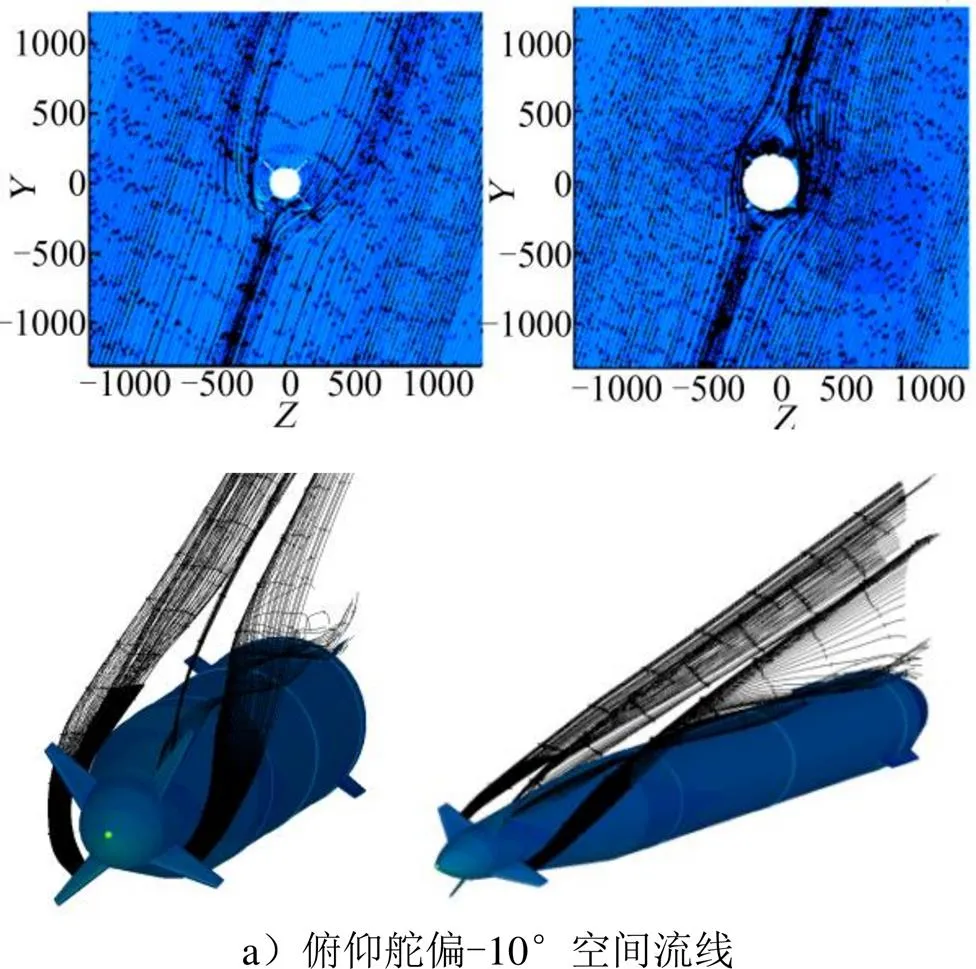
图7 鸭舵尾流在弹身产生的影响区

续图7
图8为偏航力矩系数,从图8可看出,采用鸭舵进行俯仰控制时,诱导偏航力矩随攻角变化存在较强的非线性,某攻角时偏航控制力矩为极小值而诱导偏航力矩达到反向极大值。图9为三通道配平舵偏,从图9配平舵偏来看,俯仰配平舵偏随配平攻角线性变化,而偏航配平舵偏非线性较强且存在反效。

图8 偏航力矩系数

图9 三通道配平舵偏
3.2 非线性通道耦合验证试验
采用空气舵控制的机动飞行器,线性解耦假设下的广义气动力计算公式为

俯仰通道、偏航通道和滚转通道分别按照式(1)舵偏定义进行偏转[7]。
已知俯仰通道、偏航通道和滚转通道的偏转角度,根据式(3)可以得到组合舵偏角度。

鸭式布局与正常式布局飞行器的对比风洞试验来流马赫数3、侧滑角3°,组合舵偏和三通道舵偏值见表1。
表1 组合舵偏与三通道舵偏
Tab.1 Combined and Three Channel Rudder Deflection
Maβ/(°)组合舵偏/(°)三通道舵偏/(°) ——δ1δ2δ3δ4δφδψδγ 33-13-31771052
试验舵偏状态如图10所示。

图10 试验舵偏状态


图11 侧向力系数、侧向力矩系数差量
3.3 工程解决方案
由图11可以看出,鸭舵控制通道间的强耦合效应使得气动特性非线性较强,基于线性叠加形式给出的气动偏差明显高于正常式布局,造成气动偏差带超出预示值、控制仿真偏离实际飞行状态。解决方法有如下两种:第1种方法是飞行状态主动规避;第2种方法是采用通道间协调控制设计。
a)飞行状态主动规避。
对于无法准确预示通道间耦合气动特性的情况,可以从弹道规划的角度,避开或快速穿越通道间耦合程度过大的状态点,避免长时飞行在强耦合状态下造成控制品质不佳或姿态失稳。
b)通道间协调控制。
对于可以准确预示通道间耦合气动特性且耦合特性随飞行参数(马赫数、攻角、侧滑等)变化规律性较好的情况,可以在姿控系统设计时采用通道间协调控制。


其中,协调控制项的设计对耦合特性预示准确度及规律性依赖性较高,设计完成后仍需通过三通道耦合模型或六自由度仿真对控制效果进行评估,迭代优化协调控制指令设计。
4 结束语
鸭式布局空气舵位于弹身前部高压区,比正常布局的控制效率高。采用旋转尾翼主动消旋的方案,可以消除鸭舵尾流在尾翼上产生的诱导反滚力矩;鸭舵俯仰控制时,尾迹区沿细长体弹身的横向流动产生较大的诱导侧向力矩,造成较强的偏航控制非线性,需要针对特定工况进行主动规避或者协调控制设计。
[1] 刘沛清. 近距耦合鸭式布局复杂涡系的干扰机理[J]. 北京航空航天大学学报, 2012(7): 873-876.
Liu Peiqing. Interference mechanism of complex vortex system with close coupled canard configuration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012(7): 873-876.
[2] 李剑. 鸭式布局导弹滚转控制的气动外形设计[J]. 航空兵器, 2011(6): 15-18.
Li Jian. Aerodynamic shape design for roll control of canard missile[J]. Aviation Weapon, 2011(6): 15-18.
[3] 曾广存. 鸭式布局导弹滚动气动控制方案及力矩分析[J]. 空气动力学报, 1988(9): 376-381.
Zeng Guangcun. Rolling aerodynamic control scheme and torque analysis of canard missile[J]. Journal of Aerodynamics, 1988(9): 376-381.
[4] 雷娟棉. 自旋尾翼鸭式布局导弹的滚转特性[J]. 北京理工大学学报, 2004, 24(8): 657-659.
Lei Juanmian. Roll characteristics of spin tail canard missile[J]. Journal of Beijing University of Technology, 2004, 24(8): 657-659.
[5] 敬代勇. 鸭式与正常式导弹滚转特性数值研究[J]. 弹箭与制导学报, 2013(8): 53-55.
Jing Daiyong. Numerical study on roll characteristics of canard and normal missiles[J]. Joural of Missile and Guidance, 2013(8): 53-55.
[6] 吴军飞. 鸭式布局导弹滚转控制时的侧向气动特性[J]. 弹道学报, 2013(12): 11-14.
Wu Junfei. Lateral aerodynamic characteristics of canard missile in roll control[J]. Journal of Ballistics, 2013(12): 11-14.
[7] 邓帆. 不同尾翼鸭式布局远程弹在跨/超声速的气动特性实验研究[J]. 实验流体力学, 2009, 24(2): 46-50.
Deng Fan. Experimental study on aerodynamic characteristics of long range missiles with different tailings and canard configurations at transonic velocity[J]. Experimental Fluid Mechanics, 2009, 24(2): 46-50.
Study on Aerodynamic Coupling of Canard Configuration
Zhang Li-kun, Li-wei, Zhao Yuan-chen, Wang Suo-zhu, Guo-yang
(Beijing Institute of Space Long March Vehicle, Beijing, 100076)
The canard configuration means that the air rudder is located in the front of the aircraft, compared with normal layout, the canard air rudder has high control efficiency, fast response and large lift drag ratio, it can meet the requirements of strong maneuverability and high overload under the constraint of small outer envelope size of aircraft. At the same time, the canard wake produces a strong three channel aerodynamic coupling problem on the missile body/tail. Base on the three channel coupling mechanism of canard control, the engineering solution to the problem of canard control coupling is given.
canard layout; rotating tail; combined rudder deflection
2097-1974(2023)01-0108-04
10.7654/j.issn.2097-1974.20230121
V211.3
A
2022-11-11;
2022-12-14
张立坤(1970-),女,研究员,主要研究方向为空气动力学。
李 巍(1984-),男,研究员,主要研究方向为飞行器总体设计。
赵苑辰(1993-),女,工程师,主要研究方向为导航制导与控制。
王锁柱(1984-),男,博士,高级工程师,主要研究方向为空气动力学。
郭 阳(1991-),男,博士,工程师,主要研究方向为空气动力学。
