计及频率响应安全性的双馈风电机组轴系阻尼控制策略研究
2023-03-09孟明杨靖彭琰马骏超王晨旭
孟明,杨靖,彭琰,马骏超,王晨旭
(1.浙江省风力发电技术重点实验室,杭州 310012;2.浙江运达风电股份有限公司,杭州 310012;3.国网浙江省电力有限公司电力科学研究院,杭州 310014)
0 引言
DFIG(双馈感应发电机)以其低成本和高可靠性等优点成为一种流行的大容量风力发电机组。但双馈风机由于采用变流器并网使转速与电网频率解耦而无法提供惯量响应,使得系统等效惯性随着风电在系统中占比的增加而减小。为了弥补由于风电场占比升高而引起的系统惯性下降,不同国家的电力系统都提出了风电场参与系统频率调节的要求[1]。
双馈风机具备快速独立控制有功/无功功率输出的特点。通过增加频率响应控制,使基于双馈风机的风电场能够根据系统频率的变化调整输出的有功功率,主动为系统频率调节提供支撑[2]。文献[3]分析了风电机组作为分布式电源,其频率响应能力对电网的影响。文献[4]对风电机组以惯量方式提供频率支撑的过程进行了量化分析。文献[5]研究了风电机组与其他类型并网电源共同进行频率响应的协调控制策略。
上述研究侧重于提升风电机组参与系统频率调节的能力,忽略了频率控制策略对机组自身机械结构的影响。因为频率响应控制加强了电网频率和风电机组传动链之间的耦合,电网频率的扰动可能会引起传动链的扭振,导致风机损坏。双馈风机采用行星齿轮及平行轴的齿轮箱,可以实现变速和动力传递。但是双馈风机频率支撑响应会导致电磁转矩的剧烈波动,使得施加在传动系上的转矩之间不平衡,引起扭振。由于阻尼水平不足,传动轴系的扭振可能危及风力发电机组的安全。因此,有必要协调风电机组频率响应控制和阻尼控制,以保证风电机组的稳定性和安全性。
文献[6]分析了电力系统故障对风机传动链可能造成的影响,但没有提出解决方案。文献[7-8]针对双馈风机在电网故障穿越期间的轴系扭振提出了控制方法,证明了相关控制方法的有效性,但没有提出用于机组频率响应的控制方法。文献[9]提出了评估风电机组调频参数对轴系振荡影响的指标,可用于筛选关键控制参数,有效减小了附加控制的负面影响。文献[10]提出了一种关于虚拟惯量和虚拟阻尼控制参数的优化算法,但主要针对系统低频振荡,没有考虑对轴系扭振的影响。
为提升双馈风机频率响应过程的安全性,本文提出了在双馈机组中增加基于状态观测器的全过程阻尼控制策略。通过卡尔曼观测器对机组传动链扭转角速度进行观测,在观测结果的基础上增加与扭转角速度成正比的电磁扭矩,增大传动链扭振阻尼,减轻风机的传动链扭振,从而使得在风电场参与电力系统调频的过程中,减小对风机运行的影响。最后,通过风机仿真模型和样机实测验证了所提控制策略的有效性。
1 双馈风电机组轴系扭振分析
双馈风电机组传动系统可以简化为具有刚度和阻尼因子的质量单元,由风轮、齿轮箱、发电机转子等机械部件组成。因此传动系统通常等效为多质量模型,其中最常用的是双质量块模型[11]。以风轮为代表的低速转动部分作为整体,将发电机转子等高速转动部分作为另一个整体,低速轴的参数在高速轴侧通过齿轮传动比进行等效,建立如图1 所示的风电机组轴系双质量块传动链模型[8]。

图1 风电机组轴系双质量块传动链模型Fig.1 Model of double mass transmission chain of wind turbine shaft
双质量块模型的方程可表示为:
式中:Hr和Hg分别为等效低速轴(风轮)和高速轴(发电机转子)的惯性时间常数;ωr和ωg分别为低速轴的等效转速和高速轴的实际转速;Ks和Ds分别为传动链等效刚度系数和等效阻尼系数;θs为传动轴扭转角度;Tr和Te分别为风轮的机械转矩和发电机的电磁转矩;上标“·”表示变量随时间的变化率。
在双质量块模型中,传动轴上产生的扭矩与扭转角度方程分别为:
由式(2)可得扭振阻尼为:
机组运行时发电机电磁功率与风轮机械功率平衡,风轮机械功率为:
式中:ρ为空气密度;S为风轮扫风面积,S=πR2;v为风速;Cp(λ,β)为风能利用系数,是关于叶尖速比λ和桨距角β的函数。
当风机处于最大功率跟踪状态时,λ=λopt为最佳叶尖速比,发电机实际转速ωg=nωr,n为齿轮箱变比,并将全部参数系数整合为Kopt,则与机械功率平衡的电磁功率Pe和电磁转矩Te分别可写为:
在风机实际控制中,采用跟踪发电机转速的方式对转矩进行控制,当转速出现偏差时,控制可提供的转矩偏差为:
转矩偏差ΔTe与转速偏差Δωg成正比。因此,在最大功率跟踪控制下,依靠对转矩的微调来补偿发电机转速的微小变化,实现对发电机转速振荡的抑制作用,从而有效弱化轴系扭转振荡对双馈风电机组自身运行状态的影响。
对双馈风电机组进行频率响应控制后,系统功率控制变为:
式中:P0为电网运行频率发生变化前一时刻的风机实际功率;df/dt为系统频率变化率;Tj为等效惯性系数;fN为系统额定频率;Pt为机组额定功率。
当双馈风机运行点偏离最大功率跟踪曲线,且由于释放转子惯量,无法继续以跟踪转速的方式进行转矩控制时,将失去对发电机转速振荡的良好调节能力,无法继续实现对轴系扭振的抑制。
2 扭振阻尼抑制器设计
风电机组以虚拟惯量的方式参与频率响应,主要原理为:在电网频率波动时,风电机组根据电力系统频率变化率产生的随动性功率控制,模拟同步机组的频率-有功输出特性。
为了分析电磁扭矩波动对轴系扭振的影响,需要对风电机组机电耦合模型进行准确建模。本文将双馈风电机组并网模型分为机械模型和电气模型两个部分[12]。其中,机械部分的仿真模型使用GH Bladed软件建模,对风机的气动模型、机械载荷和振动等进行分析;电气部分采用MATLAB软件建模,包括发电机、变流器和电网系统。根据以上模型功能划分,建立如图2所示的双馈风电机组联合仿真模型。
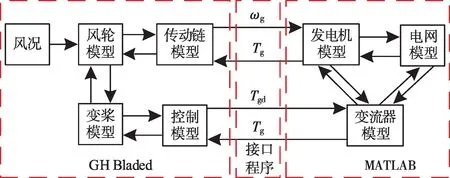
图2 双馈风电机组联合仿真模型Fig.2 Co-simulation model of DFIG-based wind turbines
由式(2)、式(3)可知,阻尼ξ与的系数成正比。因此为提升阻尼ξ,可增大的系数。对应于风机的控制,即增加与成比的电磁转矩偏移量Td=-Kd,则式(2)变为:
在该情况下,扭振阻尼增大为:
为实现对的观测,同时抑制测量噪声对系统造成的干扰,使用卡尔曼观测器对模型的扭转速度进行估计[13]。
为实现如上所述的阻尼控制,首先从卡尔曼观测器中得到传动系统扭转角度的估计值,然后在转矩PI 控制器提供的原始最大功率跟踪转矩TMPPT和虚拟惯量控制提供的附加转矩Tinertia之外,再额外附加一个电磁阻尼转矩Td。利用附加的转矩分量实现增大传动链阻尼,抑制轴系扭振的效果。控制器相关的控制单元所组成的控制框图如图3所示。
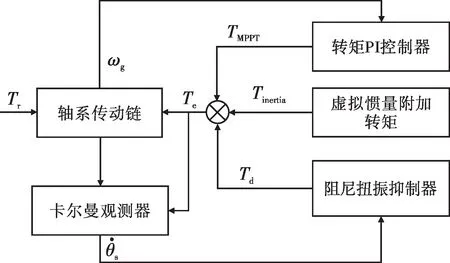
图3 基于状态观测的双馈风机扭振抑制控制框图Fig.3 Block diagram of torsional vibration suppression control for DFIG-based wind turbines based on state observation
卡尔曼观测器的系统状态方程为:
式中:x(t)=[θs,ωg,ωr,Tr,Ts]T为状态向量;u(t)为输入向量;y(t)=[ωr,ωg]T为测量向量;w(t)和v(t)分别为呈高斯分布的系统过程噪声与测量噪声,其协方差矩阵分别为Q和R。
式(10)中A、B、C分别为:
由于风机控制器以一定周期进行离散化运算,为了在运算周期Ts内对系统进行控制,需要将式(10)中的连续系统离散化:
式中:Φ为离散化的系统状态转移矩阵;Ψ为离散化的输入矩阵;X为离散化的状态向量;Y为离散化的测量向量;U为离散化的输入向量;W和V分别为离散化的噪声。
根据控制系统前一次的状态,可预测现在的状态为:
其对应的协方差为:
基于状态量的预测结果和状态的测量值,可得状态量的最优估计值为:
最优估计值的协方差值为:
其中,卡尔曼增益为:
通过卡尔曼观测器得到扭转角度的估计值后,需要对附加电磁转矩的系数Kd进行优化,以适应不同的工况。较大的Kd值有助于增强扭振的抑制作用,但却会减小系统的响应性能[11]。
3 仿真与现场测试验证
3.1 仿真验证
仿真测试采用如图4 所示[14]的两区域四发电机模型系统。该模型由4 个同步发电机和8 个2 MW风机组成。
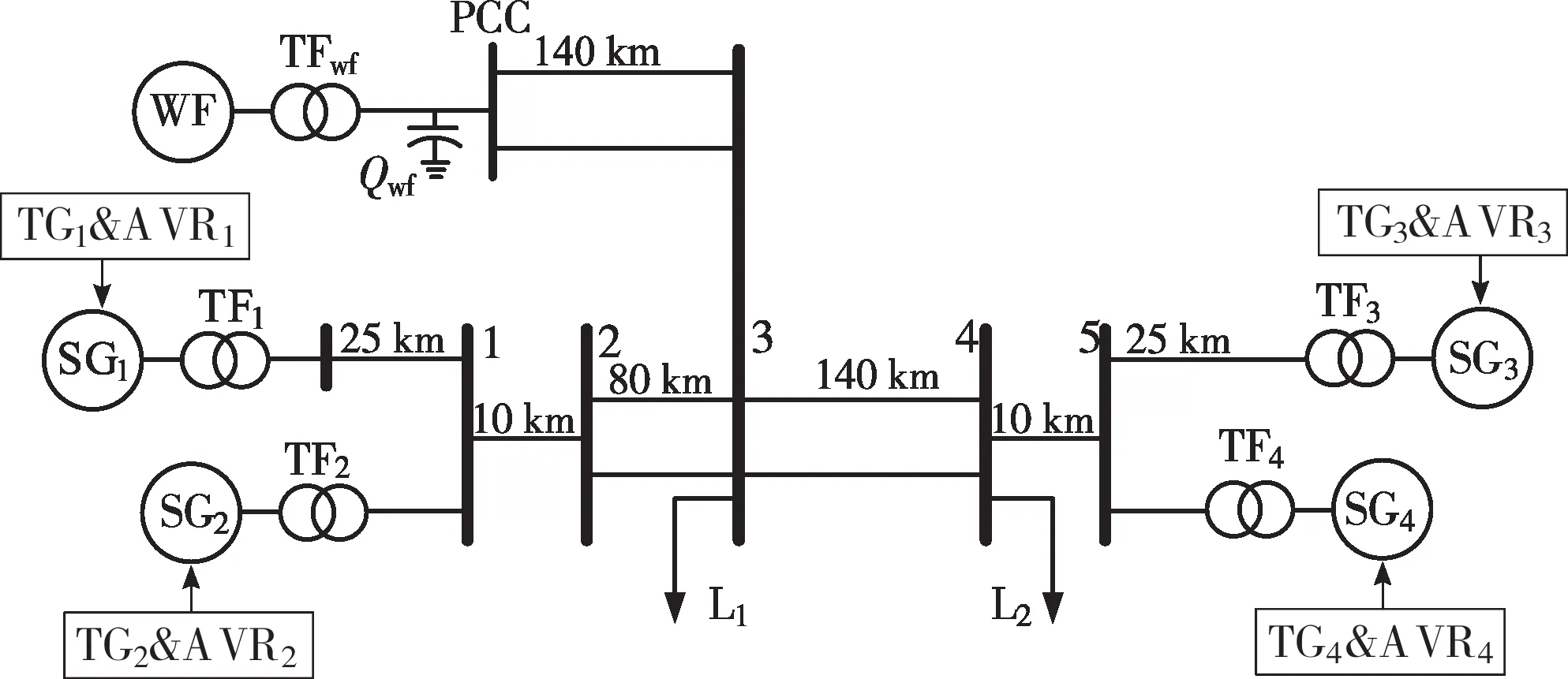
图4 两区域系统模型Fig.4 Model of the two-region system
在风电机组中加入快速功率控制功能用于频率响应支撑。在电网模型中施加频率扰动,启动风机的频率响应功能,使风机在原有功率上叠加频率响应功能计算出的功率,用来支撑并网点频率[15]。
在频率响应支撑过程中对传动链动态阻尼控制进行仿真分析,验证了其控制效果。选取平均风速为7 m/s的湍流风况,电网频率设置为由50 Hz降至49.5 Hz,经过10 s 再恢复至50 Hz,频率变化率为0.05 Hz/s,有功支撑为10%Pn(Pn为额定功率)。进一步对比分析控制优化前后的风电机组惯量响应支撑载荷和响应特性。为了方便计算风电机组核心机械部件各个方向的载荷,依据GL2010《风力发电机组认证指南》建立参考坐标系。双馈风电机组频率响应载荷仿真结果如图5所示。

图5 附加阻尼控制前后的风电机组频率响应载荷仿真结果Fig.5 Simulation results of wind turbine frequency response loads before and after additional damping control
由图5可知,采用传动链阻尼控制的频率响应策略后,传动链轴系扭振明显减小,传动链轴系载荷(轮毂Mx)明显减小,从而使得风电机组频率响应支撑过程中对传动链轴系的损伤显著减小。
表1和表2分别为控制优化前后的风电机组惯量响应支撑最大载荷和疲劳载荷结果,其中最大载荷为单个工况载荷绝对值的最大值,疲劳载荷为用雨流计数法[16]处理后的当量等效疲劳载荷(其中“应力-寿命曲线”斜率取10)。从表1、表2 可知,采用传动链动态阻尼控制的频率响应策略后,传动链轴系(轮毂Mx)最大载荷减小8%,疲劳载荷减小17%。

表1 未附加/附加阻尼控制的风电机组频率响应最大载荷对比Table 1 Comparison of maximum loads of wind turbine frequency response without/with additional damping control

表2 未附加/附加阻尼控制的风电机组频率响应疲劳载荷对比Table 2 Comparison of fatigue loads of wind turbine frequency response without/with additional damping control
通过仿真分析可知,本文所提动态阻尼控制策略能够有效抑制风电机组在频率响应过程中的传动链轴系扭振,传动链轴系载荷明显减小,转速振荡也随之减小,从而得到很好的载荷控制效果。
3.2 现场测试验证
基于仿真测试的分析结果,将传动链动态阻尼控制策略应用于某风场的WD107-2500 型双馈风机样机,叶轮直径为107 m,额定功率为2 500 kW,风机样机及样机控制系统如图6 所示,现场分别测试并记录了未附加阻尼控制与附加了阻尼控制的风电机组频率响应支撑载荷响应特性。图7为附加阻尼控制前后风电机组频率响应时的载荷实测结果对比,表3为附加阻尼控制与未附加阻尼控制的载荷对比。

图6 样机及样机控制系统Fig.6 Prototype machine and the control system
从图7可以看出,样机机组采用轴系阻尼抑制的优化策略后,在频率响应过程中轴系载荷以及塔架载荷都得到了良好的改善。表3对比了控制优化前后,风电机组频率响应支撑时最大载荷和疲劳载荷结果,传动链轴系最大载荷减小8%,疲劳载荷减小26%;采用塔架振动优化控制策略后,塔架左右方向最大载荷减小5%,疲劳载荷减小7%。

表3 附加阻尼控制前后频率响应时的载荷对比结果Table 3 Comparison results of loads during frequency response before and after additional damping control%

图7 附加阻尼控制前后风电机组频率响应时的载荷实测结果对比Fig.7 Comparison of the measured loads of wind turbine frequency response before and after additional damping control
4 结语
风电场对系统频率的主动支撑功能有利于维持电网的频率稳定。然而,风机在参与频率响应的过程中,风电机组的轴系扭振风险加大。本文利用卡尔曼状态观测器对风电机组轴系扭转速度进行实时观测,并将观测结果作为阻尼控制器的输入,使其成为具备全过程动态阻尼控制的轴系阻尼控制器。在四机两区系统中进行了仿真分析,结果表明本文所提策略相较于无附加阻尼控制策略,在频率响应过程中能够显著减少轴系最大载荷和疲劳载荷。并在仿真结果的基础上进行了实际样机测试,在实机测试中,本文策略同样有效降低了轴系载荷,表明本策略能够有效减少风电机组参与频率响应过程中的传动链轴系扭振,改善传动链轴系载荷,减少机组损伤,有效提升了风机参与电网频率响应的安全性。
